Hi Christian, Yes I like the idea of the 4+1 design and that’s what has brought me here to this thread in particular - but I am open to other systems - although maybe not a tail sitter! I’ve been flying RC fixed wing for twenty something years and have been using multi-rotors for various tasks for five…Getting a belly landing fixed wing with a big payload of batteries and gear back on the (sometimes not ideal) ground is tricky at the best of times. So although mulit-rotors’s definitely have their place and play an important role - VTOL fixed wing combo will be a nice and very useful addition to the toolkit.
I just did a CASA RePL license upgrade a few weeks ago using a Trinity F90+ which is a three motor tilter…nicely sorted out and flew very well…but also a closed system…I am definitely a builder, tinkerer and experimenter, so I would not be going down that pathway…hence the reason I have arrived here…and there’s a whole lot of experience here to draw on…and hopefully be able to add something worthwhile along the way
Cheers
Jeff
Hi Greg,
I would be very interested in setting up a MFE fighter as a 6S configuration similar to your build which by the way looks very impressive. I have the same Tarot 5008 motors, same props and hobbywing Xrotor 40 amp speedy’s etc.
I intend to do mapping work with this machine and so would run this with a Pixhawk cube orange - Here 3 GPS and Here + RTK setup - using Horus X10S express radio with RF Designs TX MOD in the module bay, so I can transmit/receive mission planner data and also RC Tx control inputs through the Horus as well, through the 16 PPM channels on groundside radio - (RFD TX MOD) and the airside RFD900x 900Mhz radio modem instead of any FrSky receiver etc. I would also run an Emlid RTK setup onboard as a secondary GPS system (only to gather data, not navigation dependant) as well to record the camera (A6000) hotshoe timings - provided I don’t have conflicts with the two onboard 900Mhz systems (emlid has a 900Mhz LORA radio) and if I do - I can just ditch the LORA radio and still record to the Emlid GPS for PPK…that’s the theoretical plan…and this bird seems to be an ideal platform…After I mess about with some other VTOL conversions first…to gain some experience first.
So my question for you Greg is, now that you have gone through the entire process with the fighter and have some very nice flight tests under your belt with your 6S system, would you mind sharing your thoughts on your system overall and providing a list of what you ended up using as far as equipment/components goes and where you ended up with MTOW etc? It would be most helpful ad appreciated - no rush - just when you have time…
I am interested in keeping it at around 7Kg if possible…doable?
Cheers
Jeff
Hi Jeff,
It’s all been posted above already. I tend to broadcast everything I do so that others can decide to use it or go another path. I would use the search feature and select the “Search this topic” box. By searching for “GregCovey” you’ll find my posts in this thread or on the whole VTOL Plane forum.
I’m quite happy with 6s the power system. It is low-cost, light, and no modifications are needed in the assembly. I purchased spare motors, ESCs, and props but have not used them yet. Granted, I fly for hobby fun and not commercial missions. I used the PIDs from the MFE example param files (also posted) and they worked great for both hovering and forward flight. I use a single 6s 21AH pack that used to fly my DJI S900 that I sold to the University of North Carolina. I have 3 packs which can produce more flight time than I have patience for.
On my Horus X10S, I use OpenTx with the Yaapu telemetry addition that pumps MavLink into the SPort for FrSky telemetry. I also use a parallel 3DR telemetry to my tablet for QGC or laptop using MP. The 5.8GHz video broadcasts to many ground links like my FieldView 777SB monitor, Black Pearl, Eachine goggles, and sometimes custom Tower app using the Eachine ROTG02 UVC receiver.
My health is poor so being able to put the finished Fighter back in the box and cart it to the flying area or pits is a big plus for me. I also like the tool-free quick assembly at the field. I added instructions and images to the inside flaps of my box just in case I get a “senior moment” at the field. 
The biggest issues I had with assembly of the Fighter (and Freeman) was gluing the halves together (without two people) and creating the wing wiring harnesses. If the kit had these assemblies already finished, it would relieve a good part of the assembly process. So the design is awesome, it just needs to have less assembly work.
Cheers!
Jeff,
Excellent! I am looking forward to drawing on your experience with fixed wings, welcome to the forum. I am also not a fan of tail sitters. The 4+1 is ideal for the conditions and data I collect (upgrading from a wing with a pusher motor).
Cheers,
Christian
Hi Greg,
OK I will scour the history for details…there is a lot of very good material here from you and others. I mainly wanted to get get your overall impressions of the machine and your setup and you’ve definitely given me that so thank you for that. I guess my ideas if I go ahead with this build is to setup as simply and as cheaply as possible to carry my gear around and do the work…and to get a feel for whether I upgrade this to a 50 volt power system or move on to something else into the future… Anyway thanks again for all the info…
Cheers
Jeff
Hi Christian,
Thanks. Yes I’ve been skimming over hundreds of posts here and your material comes up all over the place. Interesting to see a few of you guys getting these aircraft built and into service for work and fun. A lot of my years of fixed wing were old school hand launch and discuss launch gliders back when radios had rather long antennas…but only recently (over the last few years) after a break for quite some time - I got back into it and found the world had dramatically changed for the better and the development that has occurred in the open source software and hardware world is simply amazing and very empowering, if not totally consuming at times…
Yes the 4+1 definitely has the most appeal for me too.
What data do you collect with your dragging sensor?
Cheers
Jeff
Nice. There is a lot of useful information to be found in the forums including the “lessons learned” posts.
Technology has changed quite a bit since the early days. My father use to build and fly RC model planes and gliders when I was young.
I chose to do a 12s power system as a “heavy lift” endurance build for a magnetometer sensor. Currently I am preparing for some multispectral sensor missions on this same build. Magnetometer surveys will be setup after I finish the multispec surveys.
I’ve had good results with EMLID modules as I have been using them for land-based geophysical surveys for the past 3-4 years. I incorporated the original, single band RTK module into my last multispectral build to collect PPK data. My suggestion is to stick with PPK and event logging triggered by hot shoe (or pmw) on the EMLID module as RTK really isn’t that useful when you will post-process the data afterwards anyhow. RTK can be quite finicky in the field and slow your surveying down so unless you need to actively fly to an exact coordinate, I’d stick with PPK (it’s cheaper in $$$ and time). We upgraded to the EMLID M2 multiband modules this year and they seem to be working well thus far on land. I’ll share photos soon of my setup once I finish the battery tray that holds the VTOL dedicated LiPo’s in the cargo area.
Cheers,
Christian
Hi Christian,
Yes a crazy amount of useful information - across many threads, with some that appear to be running in their own parallel universe (different airframes and types etc) and some cross pollination going on between them too, thanks to some very active members…so there’s a lot to read, to sort out where to best place your efforts and zero in on the things that are relevant to your own situation and interests and also where you may be able to provide some relevant input of value to other users as well etc…way better that though, than no activity at all…it is a strong and vibrant community!
Yes I can see why you would want a 12S power system…I’m sure you will need it with your configuration. Do you use the Emlid gear for CGP’s and ground based feature survey data to tie in to your multispectral survey data? Do you ever collect GNSS event data in the air with an M+ or M2 for RTK or always just PPK on board your aircraft?
Thanks for your advice on the RTK side of things. It helps to put this into perspective for a practical and efficient workflow, and not to overdo or replicate the basic process.
I will just be using the single band Emlid RS+ and M+ with the hotshoe trigger to start with. I’ll mostly be out in the open (not really much in the way of mulit-path problems). I agree, RTK is great when it is all working and mildly inconvenient when it’s having interruptions on ground based surveying - and much worse if it drops in and out whilst in the air…So I guess what you’re saying is, I’d still have to back fill the RTK data holes by PPK processing anyway, so why bother with RTK in the first place? Makes perfect sense and makes for a less complicated and less power hungry setup…
I used a couple of different CORS based RTK systems from Topcon, collecting infrastructure data for my GIS at the University I used to work for, over the last ten years and the RTK was sometimes a bit flaky - there’s lots of components that all need to be working together in order to deliver the corrections.
I’ll probably still use the Here 3 and Here + for the nav side of things, so that system should take care of those duties and the camera event data can be recorded separately on the Emlid system - and to the Pixhawk 2 logs maybe?..or do you think that there is no point to even use the Here3/+ RTK system for the nav? I am just thinking here about accurate flight path repeatability for things like mapping grids, inspection routes, transects and the like…
I really look forward to seeing your setup photos…especially with the separated power systems…this is also an idea I have had stuck in my mind for some time…a lot of advice I have had from others is to just go with ONE big Lipo to run everything…I am still determined to separate my systems but open to suggestion…
I have in mind for my setup, a 6S - 6000 mAh Lipo (2x3000 in parallel) setup for the VTOL system and a 4S - 14000 mAh LiIon (2x7000 in parallel) for the thrust system (where less current draw is required and the Lithium Ion providing more mAh capacity for a given weight) - just thinking about multiple redundancy here by having two batteries in each circuit and separating each of the power systems, and having the lift Lipo’s nice and fresh(ish) provided I get a clean/quick take-off and transition - ready to deal with whatever the conditions may be when landing later in the flight…Also possibly have a third dedicated small Lipo/LiIon to run other things from an 8 amp UBEC and provide some more redundancy… I’ve sketched up a rough draft diagram a few weeks ago of what I was thinking and should dig it out and share it for others’ comments…
I really like the idea of the Fighter (and its ability to add more gear or batteries later if I start light) although the more I move towards starting this project, the more the MFE Striver starts to make more sense for my application and component setup…anyone here building or thinking about building this airframe?
As I said in an earlier post - I may even put this all together first on a Ranger Ex as a test bed unit so I can learn and make my mistakes on this. Any thoughts on this?
Cheers
Jeff
I use ground control points and log events from the shutter output signal as well as PPK. My GCP’s are not as useful in the wetlands I fly since dry land access is extremely limited. In practice, not all of the events get logged to the Reach RTK for unknown reasons (perhaps the output pulse has issues). Because of that, I collect PPK data so that I then can match up the GPS times from the images to the sUAS path. We use a Micasense Rededge/Altum camera with their light sensor which geotags images using its own GPS.
Agree 100%. For most of our uses the single band has been excellent for terrestrial (land) surveys though we occupy a site for for approx. 10 minutes of static GPS logging while collecting other data. The general terrain of my study areas are pretty open (aside from canyons) and not a whole lot of tall vegetation to create problems (Utah is mostly desert).
If you already have a Here3 then I’d use it on board. I have a Here2 for nav because of cost and availability at the time I ordered parts. My previous build had a generic M8N which was also fine. Either version of the Here will work fine for logs and nav. You’ll have PPK from the EMLID which will be easier to work with than location data from a flight log. You could do a flight path comparison of the two, but ultimately it will come down to the processing software you use to create the final orthomosaics. If you have good coverage (overlap) then the precision/accuracy of the center of each image is less of an issue especially when you have GCP’s and good software.
I’d only use GCP’s with PPK to check the final orthomosaic or as a safety net if one of the two methods fails. If terrain/access is prohibitive regarding GCP’s, then PPK or RTK are really your only options.
Happy to take a look at your draft schematic, I could update and share mine now that wiring is complete. I like the idea of having power redundancy and not just a spare BEC because if the battery fails then it won’t matter. I am still on the fence in deciding to use the VTOL LiPo battery as a backup to the primary Li-Ion battery or keep it separate and just monitor the voltage/current. I need to look more closely at the battery failsafe parameters and wiring connections before I try it.
If you find any good info on common signal, let me know. I’ve seen chatter but not explicit details. This is the most detailed post regarding double battery (power) I have found thus far: "DoubleBat" Power Supply For Quadplanes - #29 by Rolf
If you have a proven airframe then it’s easy to add components to it to test (most of the time). Building a new airframe you still have to get to the point of airworthiness so maybe it comes down to cost of repairs if a test flight has an “unexpected landing” and needs fixing?
Cheers,
Christian
Mine was delivered yesterday with small defects. Both ailerons and rudder broken out, foot of the horizontal stabilizer is bent and some unsightly scratches on the top of the right wing. As already noted by Greg, the “jiao shui” glue was missing. All in all not a huge problem, but annoying. Banggood has not yet responded, the “ticket” has not yet been answered.
But first of all, many thanks to @GregCovey for his great reports and contributions not only in this thread. I’m studying this thread all right now, it will help me to decide which voltage (or perhaps two different batterys for propulsion and hover) I will the fighter equip with.
Thanks for pointing out this recommended store in the UK that I know well. UK has left the E.U., so also private persons from the E.U. can now order there tax-free. But on the other hand, the exemption limits (22 Euro) for import from non-E.U. countries have been abolished since July 1. Strictly speaking, this means that even for 5 euro servos import tax must be paid by the E.U. consumer at home customs. The administrative effort involved would be insane. Many shipping companies like DHL of course offer the “service” of customs declaration. They rightly also want to earn, which in turn makes things more expensive. On the other hand, the shipping costs UK-E.U. are now lower than China-E.U. So, since shipping costs is also taxed by E.U., we will have to see what this means in practice. Apologies for the broad statement on taxation.
Cheers
@GregCovey has done a great job with his threads and engaging community!
@Rolf I am creating a build with separate power for VTOL (LiPo) and the primary system with forward flight (Li-Ion) motivated by your “Doublebat” build and thread. Regardless the arrangement of primary vs. backup power vs. just voltage and current sensing, there still needs to be common signal if both are connected to the FC or some other component, correct? (simplest is an appropriate gauge wire connecting grounds between separate battery power systems)
Cheers and welcome to the forum. I look forward to learning from your experiences,
Christian
@Christian_H
My experience with 2 batteries on the quad VTOL has been positive, as long as you mainly use the quad motors only for takeoff and landing at the end of the cruise and take care that the quad batteries do not age too much.
As you write, a thick GND cable between the negative terminals of both battery systems is mandatory.
In the Mini-Talon I had no problems with the dual system, it worked technically flawlessly. Last winter it crashed during low-level flight because a servo on the V-tail broke (What was another reason to buy the Fighter with 2 servos for the elevators)
If you have a mission with frequent hovering, I would rather use a common power supply with as high voltage as possible (because of the then low current flow and thus lower load and aging of the battery).
If the calculated cost of battery aging is not an issue, I would go with the 12s system with one circuit.
Rolf
This is precisely my setup and intention. I will have flights of 45-60 minutes with a short launch/landing.
The VTOL batteries use a 10 AWG (vs. smaller Li-Ion 12 AWG) which is what I plan to use for the common signal.
The lower current, load, and consequentially lower heat generated are all reasons I went with a 12s system for longevity. I also have a large payload to carry for some of my missions so 6s may have been under-powered.
I am using 6s in series (12s) for both VTOL and primary power which is more cost effective than a single 12s battery for each. Because of this, I do have to watch for one battery failing in the series hence the desire to use the VTOL power as a backup to the primary. The idea would be that if the primary power (Li-Ion) fails, the plane would switch to VTOL power/mode and I’d land immediately since it will only power the VTOL motors.
Thanks for confirming the common signal detail.
Cheers,
Christian
Here is my power system schematic with the Pixhawk 2.1 Orange Cube ADS-B:
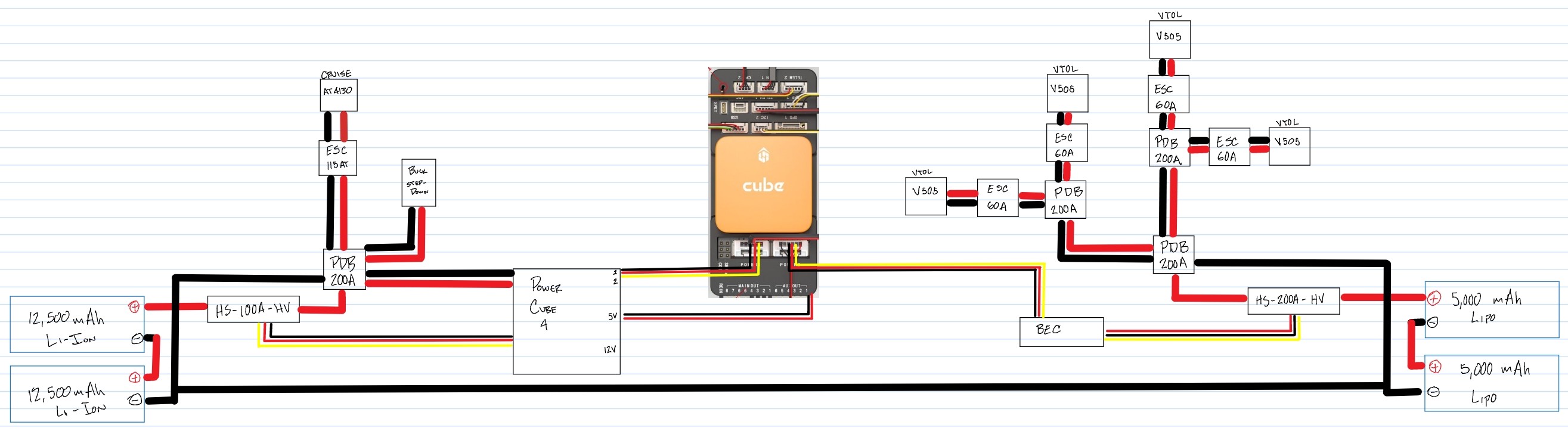
The primary power (12s Li-Ion) circuit will host the FC, servo rail, Cruise motor, Rx, and payload sensors either directly from the battery or via Mauch Power Cube (4 BEC outputs: 1 PM @ 5.35V, 1 backup PM @5.35V, 1 accessory @5.35V, 1 accessory @12V).
The VTOL power (12s LiPo) circuit will host the VTOL motors directly and potentially serve as backup FC power via a Mauch HYB-BEC 4-14s (1 BEC output: 1@5.35V) should one of the primary power circuit batteries fail or the primary BEC (Power Cube PM) fail.
The PDB’s are simple connection boards and are only required at the main electric hubs. The extra PDB in the VTOL motor chain might end up a splice solder connection to save weight.
Cheers,
Christian
Hi Christian,
Thanks for your responses - they are very helpful. Also very interesting to see your wiring diagram. Thanks for sharing.
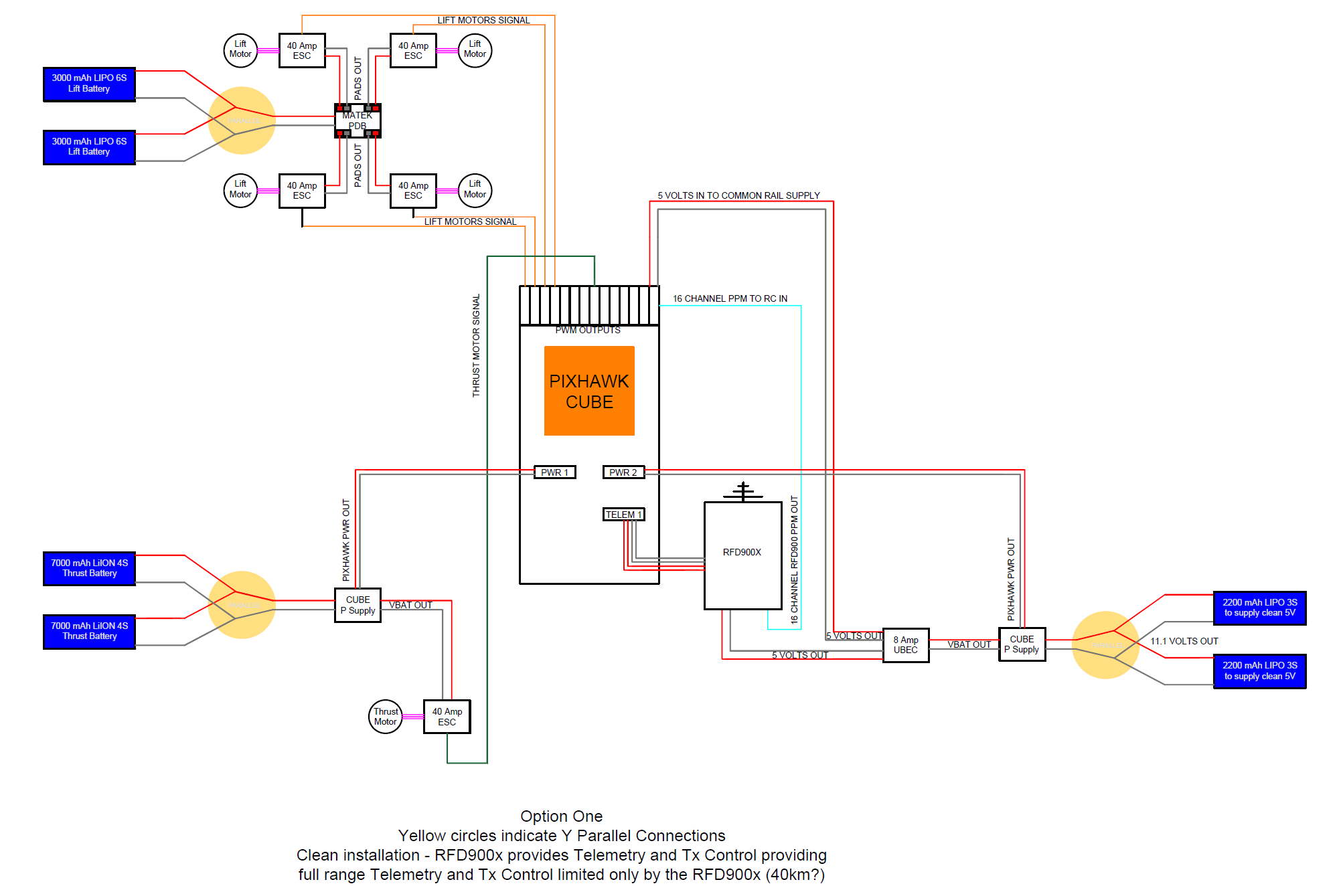
I don’t have time to properly respond right now but thought I should at least attach my draft component layout options that I put together a few weeks ago. Keep in mind these were just basic ideas and will need refinement to get them to something that resembles a sensible final plan. Now that I have seen your and Rolf’s layouts, it is time to do some editing to refine my layout…Your comments on them would be welcomed. Do you think the third battery idea is valid or just introducing more complexity and weight?
Option one uses only RFD900x to perform all Rx and Telem - This is using a Horus Radio with TX MOD from RFDesigns to control Tx/Rx and telem from the Horus Tx. wifi connected to laptop for Mission Planner persistent connection.
Option two - adds an FrSKY X8R receiver…which is going to limit ultimate range ability - but separates Rx ad telem functions to two separated components. This is using a pair of RFD900x’s in the normal way for telem and Horus radio talking to X8R for control.
I realise also that critical components such as sik radio and receiver should probably both be powered from a battery that is also vital to the system operation…ie the LIFT battery and the CRUISE Battery Circuits, and probably not the third auxiliary battery which should only be used for non-critical components, and as perhaps backup?
I really like your idea of being able to switch power sources and land if there is a problem with one of them. Maybe I should look at the Mauch power management modules?

Cheers
Jeff
Mr. Chang Liu,
We now have several reports of broken ailerons from different continents. I have not seen this problem but suspect the damage may have occurred during the more stringent customs inspections due to inappropriate handling by the inspector.
Perhaps a stiff cardboard shield can be placed over the ailerons and rudder to protect them once the box leaves the factory.
Best regards,
Greg C.
Having a dedicated battery for your Rx means that if all else fails, you will be able to find your plane!
On my previous build I had a TBS crossfire nano Rx that could take a 1s lipo battery to turn the Rx into a beacon when the main power failed so you could find your downed craft. I don’t have Rx power backup this time but am considering it when I set up for the other sensor load. I do have a VIFLY 2 as recommended by Greg and a “last known coordinate”.
Personally I’d go for simplicity in components and use just one Tx/Rx with the RF Designs Tx MOD for telem and control. I considered this exact option, however, the TX MOD units were out of stock when I was ordering parts. The crossfire Tx module had a bluetooth connection to Mission Planner which was really nice. It was also a bit slow to upload parameters via Mavlink but it worked almost flawlessly.
Use your most reliable battery for the Rx which is likely the same battery for your FC. Just don’t put it on a battery circuit that will deplete or fail before landing. Don’t forget to have a common signal connection (as Rolf confirmed) between battery circuits if a component has a shared connection (i.e., FC).
Mauch is the gold standard and the prices reflect that.
There is the sensor hub x2 is made for parallel battery connections (not series) and monitors the voltage difference between the 2 batteries. You can hook up a buzzer/alarm for close distance or possibly some other trigger on the FC to alert you of problems when not within earshot.
Mauch power cubes are nice in that you have all BEC’s in one package and redundancy. The downfall is that all of them hook up to the same battery circuit. So for backup power, use separate BEC’s.
Cheers,
Christian
Hi Christian
Thanks for your input and good advice.
With regards to the Common Ground between battery systems where they are connected to a shared component connection, I’m assuming this is to avoid ground loops within the system overall?
So I understand that I need to remove the ground loops from the system, If I end up running with the three battery approach though, I would potentially have 6S - 4S and 2S or 3S on each of the systems respectively and all sharing a common ground. Is that something that is achievable, or do they all need to be the same voltage?
Also just a quick question regarding the connectors throughout the systems from the batteries and on…I assume you are using XT-90 connectors or equivalent form a current handing perspective as a minimum?
Cheers
Jeff
Hi All
I have been watching this thread over the last couple of weeks i think our setup may be of some interest, we have been flying the Fighter for a few months now its mainly used for for mapping missions so it is primarily built for endurance before that we were and still are flying Believers another very good mapping aircraft, it was purchased as a kit before the PNP versions became available, after a few discussions with Ben at 3DXR the lift motors we chose to go with were T-Motor 6007 KV160’s with built in ESC’s (Arm Kit) the props are MFE 20 x6.8 Carbon, the thrust motor is a T-Motor MN605-S KV170 with 19x10 APC Prop this combination has proved to be quite efficient it draws around 37 Amps in lift and cruises at 17m/s at an average of about 7 Amps that’s with a Take-off weight of 11.2Kg. Onboard we have a Cube Orange ADSB board a dual GPS setup with an Emlid M2 and HERE2 the airspeed sensor is a Matek UAVCAN DLVR-10 unit
For control/telem we use a Herelink with an FPV cam just for visual reference, an RFD868 radio is used as backup control/telem with a Laptop GCS running Mission Planner, The Emlid M2 is sent corrections over the RFD868 from a RS2 Base Unit connected to NTRIP the RTK connection has proved to be extremly reliable although we did have to play with the antenna placement to get it right, For most missions we have 2 sensors on board an RS1RMk2 42Mpx Camera with hotshoe event logging and a Multispectral with geotagging the sensors have their own power supplies
Our main setup is based on a 12s setup using 2 x Tattu 22000Mah 6S batteries all ancillaries and FC are powered from a single power module the only exception is the servo rail which has a seperate BEC, the single battery setup has never been an issue providing you manage it I use very short VTOL Takeoff’s typically around 10 seconds and the same with landings , I can cover 240 Acres in about an hour which is the extent of our permission and still have around 40% battery, with the sensors onboard the takeoff weight is 11.2Kg so its doing quite well. Of course it would be beneficial to use a separate lift/thrust system and we did consider it but there is just not enough space in this particular configuration
I have attached a link to a short video showing Takeoff and Transition, I am very pleased with the overall performance in VTOL and Fixed wing modes the transitions are surprisingly good, at the moment we are testing 4.1.0 Beta which has some very interesting improvements
https://mega.nz/file/HU8EkR7B#KtpEjSJcFq8x6J6GracMQKKzas9OkMl-cbN7GrOflTs
All the parts/kits are available from Ben at 3DXR (UK) he also has a wealth of knowledge regarding anything drone related