I’m working on finding best filtering option for my copter. Best to me means a balance between filtering results and CPU load (H7).
So have some questions:
Some points of docs states FFT is good enough while other say “throttle” may help better.
Does it make sense to enable another Notch filter while using FFT?? Like Throttle or Fixed?
What is the impact on CPU load while adding more harmonic?
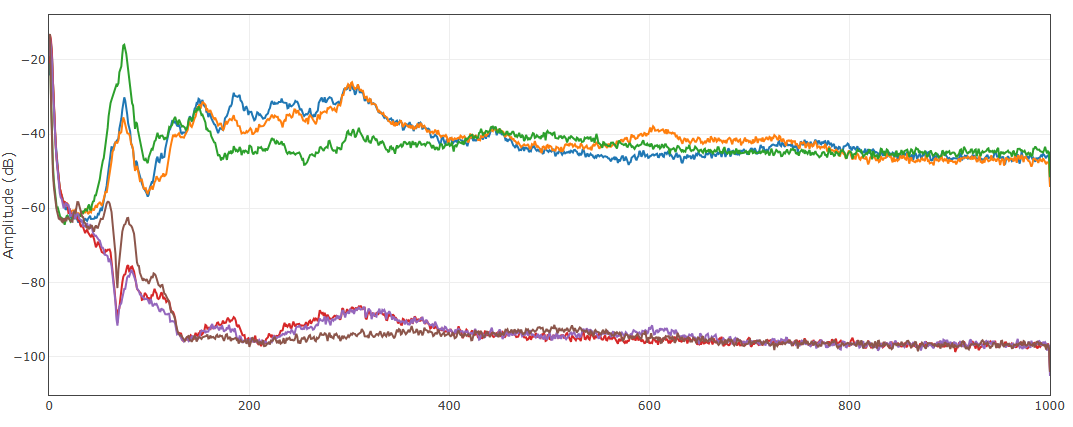
Last but most important, what is the noise level (in dB) acceptable so no further tuning is necessary?
As I wrote above, I will go with FFT and possible fixed for 2nd bank.
I fly on FFT only today and even with wrong frequencies drone fly much better.
Flight data will be collected tomorrow, followed by a review of results.
Video is really great, much better then docs online.
If I can’t use ESC, I use throttle. Some of that has been dictated by hardware, but it’s worked well for me.
Every situation is different, but probably not. If you turn on the notches on the web tool I bet there will be a lot of overlap of the two filters, so likely overkill. Unless you have some very specific frame resonance then it might help, or a helicopter.
It will increase it. May be negligible, or not. Again, like I said in number 1, it may be unneeded. If the main peak is targeted properly, often the harmonics will clear up without the need for the harmonics.
As you’ve already stated, -50db. I’ve been using that as a rule and it works for me.
I generally try to use as little filtering as possible. I’ve stopped chasing all those little bumps in the graph because it didn’t make any difference when I went outside.
Guys I’m so sorry. I do not know how it happened but I was sure I set FIXed as 2nd notch. While 2nd image clearly states it was set to Throttle. Will have to fly it over again.