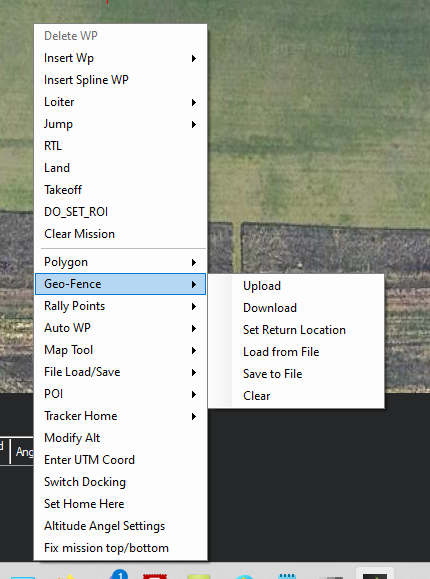
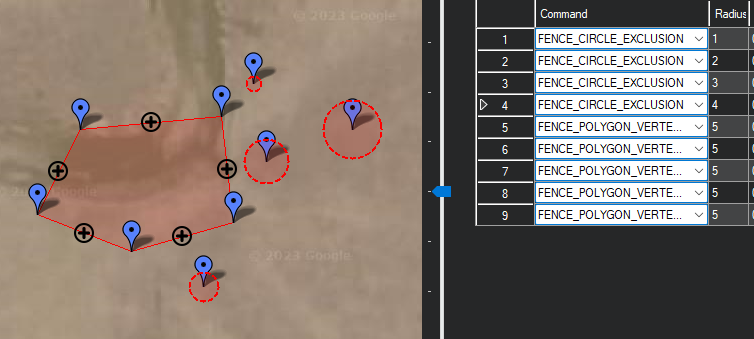
Question 1: I am wondering if there is a way to create a fence within Waypoint map for a Rover not to follow its defined path?
For example, in my case I am going to make a rover go back and forth in my backyard and spray fertilizer. I happen to have a number of trees in my backyard and I want the rover to go around those trees (I can find the lat. long of those trees) but continue on to its mission.
Trying to avoid obstacle avoidance system at this point and I do not want to manually plot the path (Which is doable) to make the rover go around each tree.
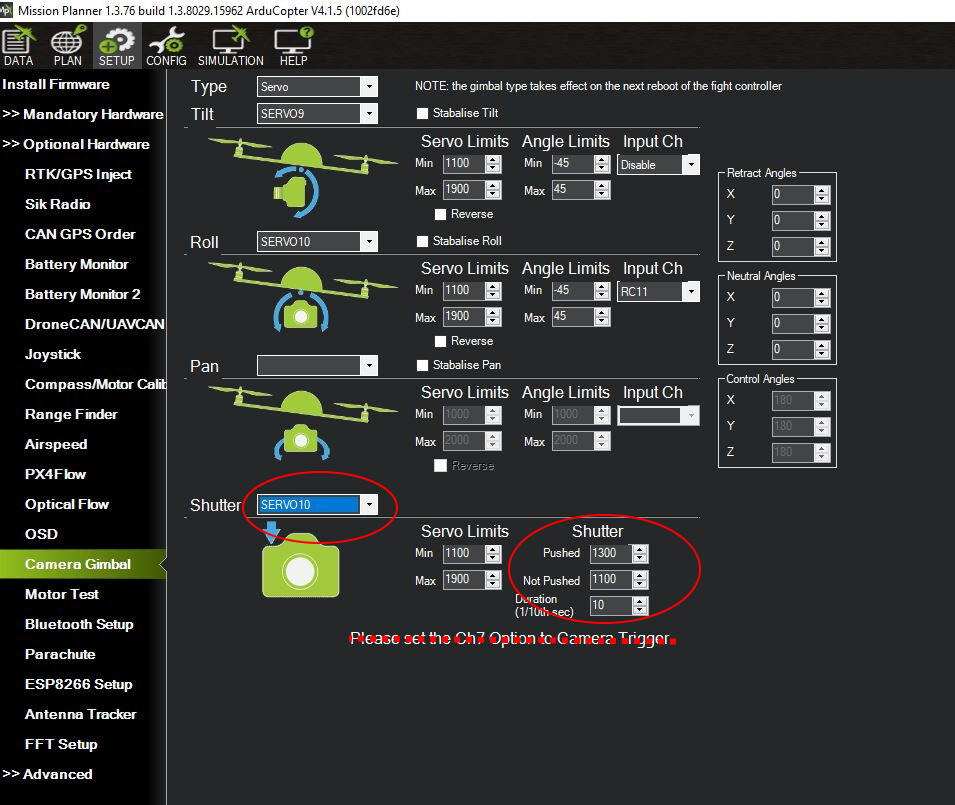
Question 2: Does the camera trigger function works in Rover mode? I want to use the camera trigger feature to activate and de activate fertilizer sprayer at fixed intervals as defined in mission planner. This will be used to control spray of fertilizer.
About question 2, I have no idea about camera trigger, but you can use the same Mission Planner you used to make this grid to automatically place servo High at the start of the line and servo Low at the end (or even use a relay, the command it uses is the DO_SERVO_RELAY).
About Question 1, you can use the Path Planner to avoid the fence, but as soon as the obstacle is cleared, it will not come back to the former line, going to the next wp in a straight line. So I think you would have to make it manually with wps around the trees.
You can use BendyRuler obstacle avoidance around fences with a few caveats:
It takes some tuning to get the behavior as good as it can be, and even then, it may skip some thin strips on either side of a fence as it converges back to the planned path.
Waypoints should generally not be placed inside fences. There are some guards to avoid completely errant behavior if this happens, but it should be avoided if at all possible. So auto-generated paths may still require some tweaking to ensure predictability.
In Ardu coptter and or Ardu Plane, the camera trigger allows you take pictures at an interval you define in settings. In other words a relay is ON (trigger) and then OFF and then ON again and so on. Its done automatically.
I was trying to figure out if that feature is available in Ardu Rover or not.
Also, SetCamTrigDist seems to work fine in Rover. However, it’s a VERY brief toggle of the relay from low to high (or vice versa). So you may need some additional circuit logic to use it for toggling your sprayer on and off.
Agree. I can design a delay circuit to keep the spray ON longer. or option two would be to use some external companion computer to control the spray trigger.
My end goal is to stop the sprayer while the Rover is making U turn’s.
Nice work “I think the neighbors think I am crazy and that’s fine” lol Classic, I am joining the club soon. I also have 2 acres of land. First I am completing a weed/fertilizer/grass seeding system and next is mower like yours!
You can use the grid option that I told you in my first message to automaticaly turn the relay ON/OFF in the turnarounds. That’s why I thought it was stranger when you asked about camera trigger, this feature has a completely different behaviour from what is need for a sprayer, as @Yuri_Rage clarified.
@BrunoBagarini I understand what you are saying but there are two scenarios:
Turn the sprayer OFF completely while making turns.
Turn ON and OFF sprayer at defined intervals while following its way points.
When you spray, you don’t keep the sprayer ON always, it gets ON and OFF based on type of spray you are using and its spray diameter vs. speed of the rover to avoid over lapping of spraying of chemicals. This allows even spray of e.g. weed killing chemical. Excess chemical can actually damage the grass if one is not careful.
When it comes to fertilizer always ON maybe ok but it all depends on the strength of the fertilizer.
This rover is designed to do three functions. Weed control, fertilizer and then grass seeding all in one machine, but each trip will be based on what function the rover will perform and we change settings accordingly per trip.
My next goal is to do spot spray using a weed detection software to eliminate excess use of chemicals which is bad for the soil.