I would be happy to see a guided follow me like Mission Maker for ArduPilot (fka Tower) does.
Is there a chance to implement that?
Follow Me was just implemented in QGC using latest Copter/Rover support. Look here: https://github.com/mavlink/qgroundcontrol/issues/7811
There are 2 different Follow Me Modes:
-
Follow - implemented in UAV
The UAV follows an object or GCS. -
Guided - implemented in GCS
The GCS sends navigation commands to the UAV to make it follow the GCS.
1 is the one which was just implemented.
2 is the one I wish to have because it is much more powerful.
The GCS can implement all variants and options of follow me without additional firmware support.
Mission Maker for ArduPilot (ex Tower) can do:
Circle
Follow in front
Follow behind
Follow left
Follow right
and others
I don’t ever plan on implementing a gcs only based follow me.
If you look here: https://github.com/ArduPilot/ardupilot/pull/7655 you can see how you can achieve the differerent follow locations you want (front, behind, …) by setting parameters. I don’t see what is missing from that which would require gcs controlled implementation.
Also if there was something missin then that would be request on the firmware side to add it.
the 7655 pull sounds promising.
But does QGC support all these?
QGC is not involved with positioning the vehicle relative to GCS, firmware is fully in control of that. QGC is just responsible for sending it’s own location at the right times. Control over vehicle position with respect to GCS are just vehicle parameter settings. So if you are running latest daily QGC and firmware which has that pull in it, it should all work.
I think there is also a FOLLOW_ENABLE parameter you need to turn on which might not be mentioned in that pull. Don’t remember if that is the right name.
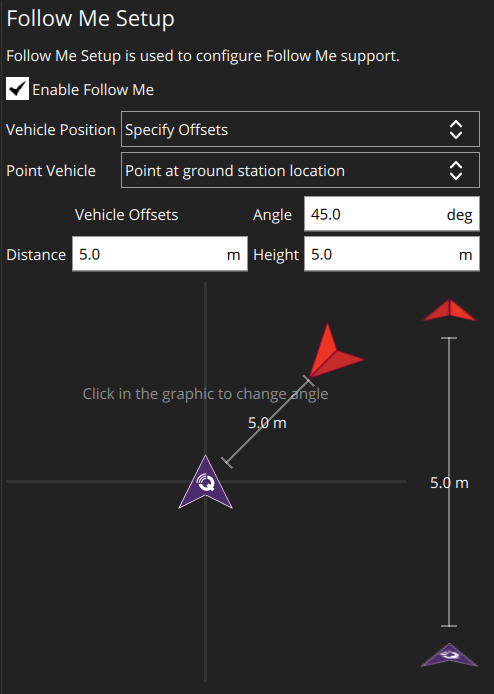
Maybe at some point I’ll may a nice UI setup page for Follow setup but for now you need to use the Parameter Editor.
Don’t get me wrong but my feature request is all about having a nice and comfortable follow me UI in QGC. Poking strange parameters that only developers understand is not what I meant.
I don’t disagree with that. Hadn’t thought about a setup page, till this discussion. I’ll take a look.
I’m looking forward…
wonderful!
I am excited about a test.
This should be available in Daily Builds now.
I will test it as soon as the rain stops.
Is it in the Android version too?
It’s in all versions
The rain is gone and I have made a test with the Android version.
The google play daily version does not have the new features (it is from 2019/9/17), only the apk does.
Configuring follow me works great.
But at the field I could not switch to “follow”, neither from qgc nor from the transmitter.
Also “take off” did not work.
Unfortunately the log upload does not work, the log file is here
Yeah I just discovered that the Daily Build stopped updating a few weeks back. The links from the docs do work as I think you already discovered.
Not sure that this means? Need exact steps and the point where something went wrong.
Same thing, “did not work” could mean one of a million different problems. Need more detail.
“did not work” could mean one of a million different problems
I know, unfortunately there are no telemetry logs, see here
I can’t see any errors in the dataflash log.
Could not switch to follow:
- Follow doesn’t show up as a selectable flight mode in the toolbar?
- Follow does show up in the toolbar list but you selected it and absolutely nothing happened?
- You selected it and you got an error?
- You selected it, the flight mode changed in the toolbar changed to follow, but follow did not work?
- …
Same thing for takeoff…