Summary:
During a flight five RCIN channels changed values during 1 sample triggering emergency stop. Luckily system quickly recovered, but now I’m grounded and I need to get up again soon.
Setup:
Hexacopter
Pixhawk 2.1 Cube running ardupilot 3.6.8 stable
Raspberry pi companion computer connected to serial 0
FrSky RX8R, only connection is Pixhawk RCIN (RX8R powered through this interface)
Taranis X9DPlus
Fail safe settings:
I cannot say for sure, but the intention was to set up XR8R for no pulses (no pulses selected in TX prior to bind, bind, power off TX+RX, power RX brief push on RX when TX off, finally power off RX+TX). I have found no way to verify that these are the actual settings.
On ardupilot I had FS_THR_ENABLE set to 0 (no action) during this flight for different reasons.
Normally this setup works as intended, I tested it the same day by switching off the TX during flight.
Unfortunately I had not set up RSSI logging, but I have corrected this now. There are RSSI logs and RXbat logs from TX memory card though and they are fine.
The problem:
Hexacopter is flown by Raspberry via dronekit-python. It flies ‘goto’-commands in guided mode. All of a sudden, 350m away, it drops altitude and then recovers. The ArduPilot log reveals that the five of the interpreted signals from the receiver makes a step for one sample. One of the channels is set up for emergency stop and this was triggered and then recovered.
Affected channels:
Channel/function | Value before and after event | Value during 1 sample
CH3/thr: | 1502 | 874
CH5/flight mode: | 1903 | 2085
CH7/RTL: | 997 | 1408
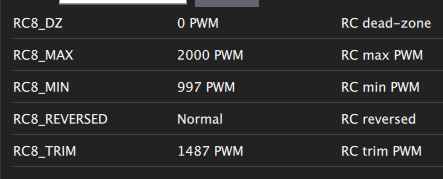
CH8/Emergency stop: | 1487 | 2019
CH9/gimbal pan: | 1872 | 1016
We are desperately trying to reproduce the issue on ground but no luck.
In one test on a twin system (same, same) we powered the RX from other source and it was still operational at 2.5V.
Screenshot:
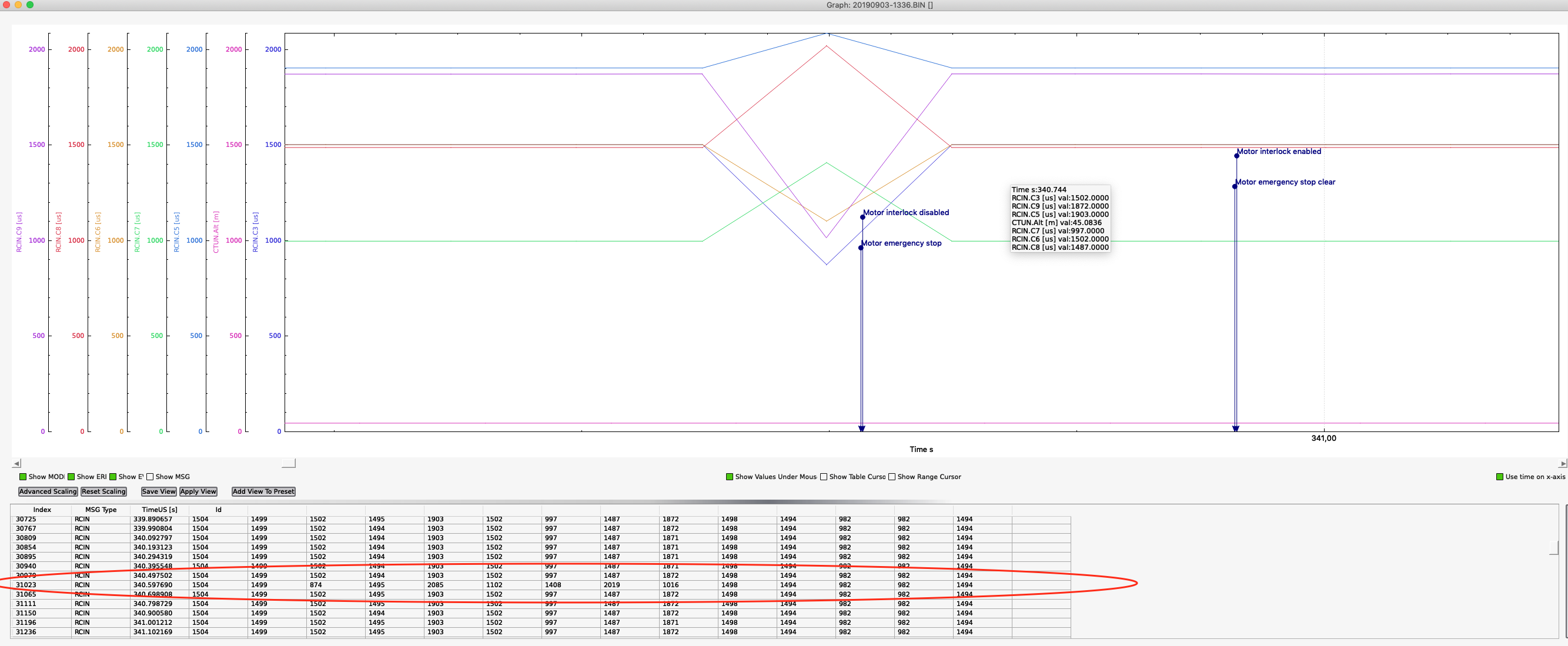
ArduPilot log: