On this hexacopter mission flight (stable 4.0.3, log) the mission (spiral 10x12, waypoints altitude 1.5 and 1.7m alternatively) had to be attempted four times till success. On the log appears:
MSG, 472367271, Failsafe: Terrain data missing
ERR, 472367343, 23, 1
ERR, 472701338, 23, 0
MSG, 551025284, Failsafe: Terrain data missing
ERR, 551025352, 23, 1
ERR, 551360045, 23, 0
MSG, 610841934, Failsafe: Terrain data missing
ERR, 610842002, 23, 1
ERR, 611175423, 23, 0
MSG, 663387547, Failsafe: Terrain data missing
ERR, 663387775, 23, 1
ERR, 663721292, 23, 0
spoken Failsafe: terrain data missing was heard, and RTL was started.
However, TERRAIN_ENABLE=0.
Certainly, there is some problem with the altitude:
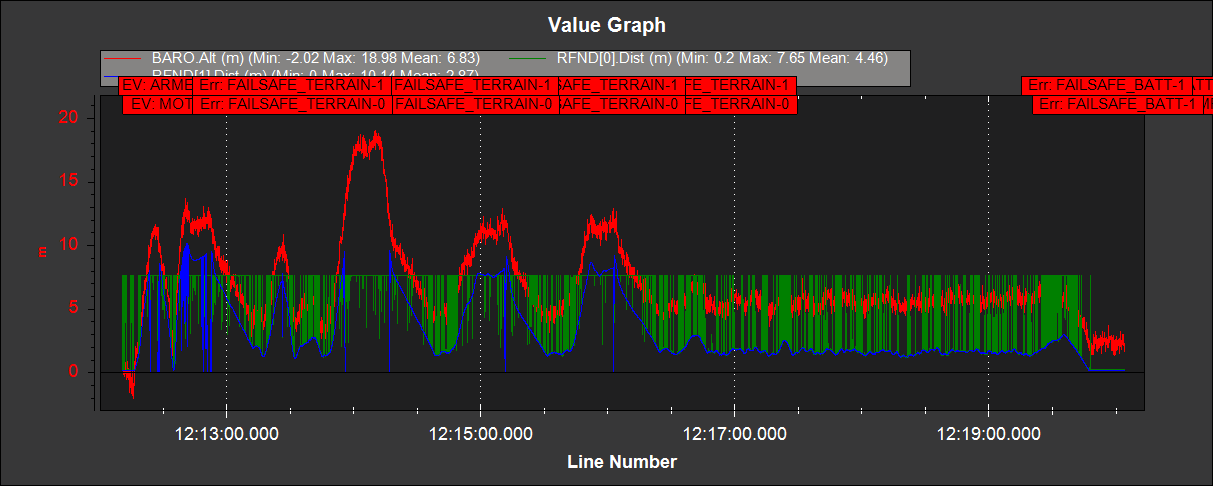
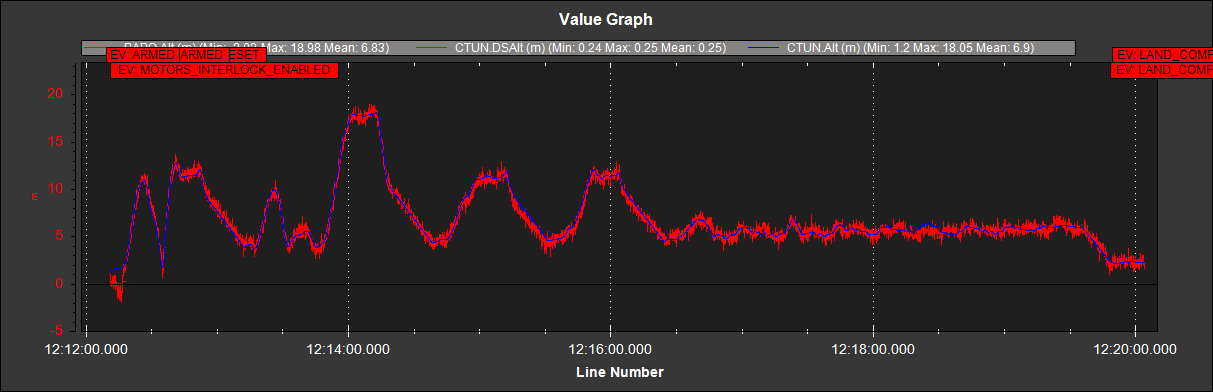
(on a summer shiny day with yellow grass below the range finders have problems), but CTUN.DSAlt and CTUN.Alt agree:
This and this describe a similar problem, but on other copter the same mission is perfect or almost perfect (ROI forgotten).
Any suggestion? Thanks.