Some intro. first. I am brand new with drones and electric motors. For many decades I have flown nitro and gasoline planes (0.35 to 110cc) and helicopters (450 to 900) without autopilots; only gyros for the flybarless heli heads.
The frame kit is a X500 with the following components.
After going through Arducopter’s “First time Setup” and “First flight and tuning” multiple times as I am familiar with helis gravity is ******* (lol) as they do not have wings do glide.
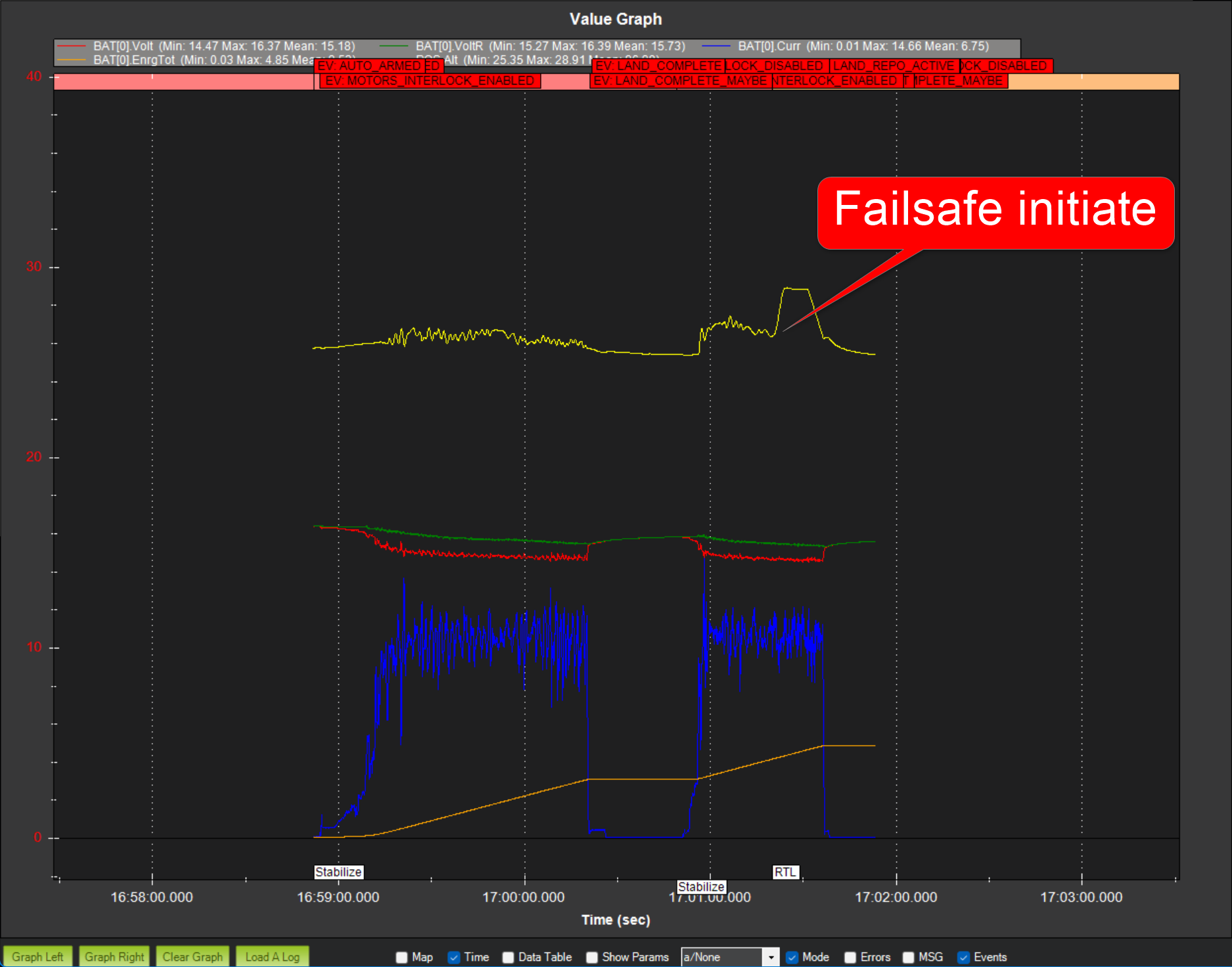
I believe the FC, GPS, Comp. and Bar are operating properly as I had no-propellers testing RC, telemetry, motors, failsafes etc. I put on the props and brought it a low hover for a few seconds looking very, very stable. Then I tried little longer and it went to failsafe with “Battery low voltage” and engaged RTL which worked perfectly, gained a few feet of altitude and then came to a very soft landing at the same take-off spot; failsafe is working!!!
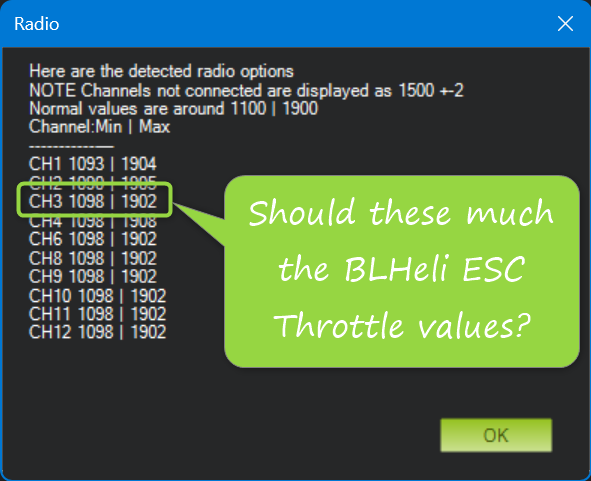
I matched the PWM (min/max) from the RC Calibration to the BLHeli32 configuration (1003 - 1996) for all the ESCs.
The questions I have are:
For the configuration (see above) should I decrease the BATT_CRT_VOLT (14), BATT_LOW_VOLT (14.8)?
Did the combination of the motors/props is wrong for this X-quad size?
Do you match the throttle PWM of the RC with the ESC?
Using Dshot600 and I can not run the calibarion procedure for these ESCs, yes?
I setup the MOT_SPIN_ARM 0.04 and MOT_SPIN_MIN 0.07 but I do not get these speeds during arming/spin-up. Props rotate almost twice as fast from these values.
Upload the .bin log to a fileshare site like dropbox or onedrive, then share the link to it.
If you connected to MissionPlanner and used Initial Parameters to set the battery failsafe voltages then leave them as they are.
For 4S you should have these:
BATT_ARM_VOLT,14.70
BATT_CRT_VOLT,14.00
BATT_LOW_VOLT,14.40
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2 or 3
MOT_BAT_VOLT_MAX,16.80
MOT_BAT_VOLT_MIN,13.20
If you are using DSHOT (MOT_PWM_TYPE,6 for example) then you should have
MOT_PWM_MAX,2000
MOT_PWM_MIN,1000
and no need to calibrate ESCs.
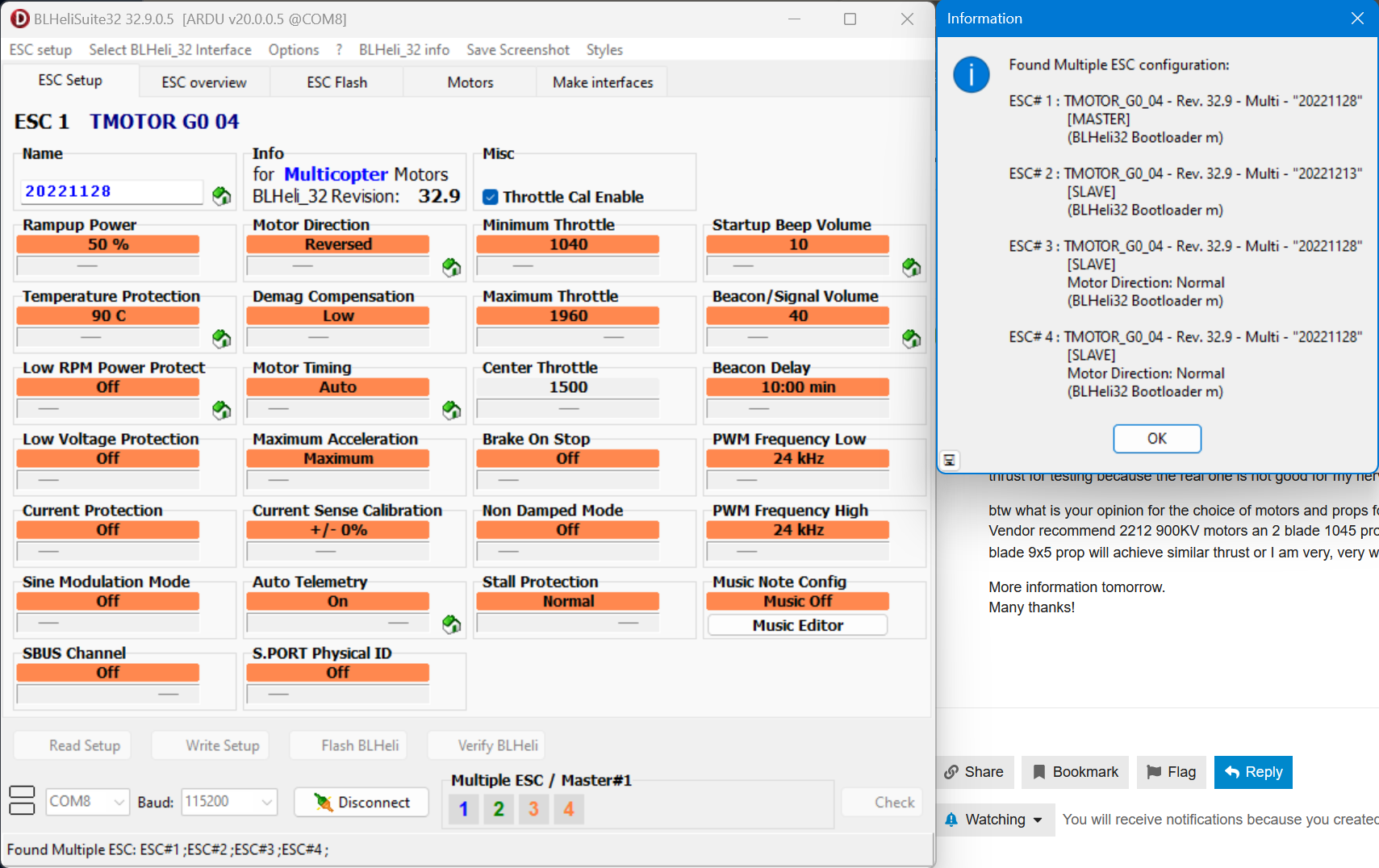
With the BLHELI ESCs connect with the BLHELI32 Suite using passthrough and set these even if you dont use DSHOT
Low RPM Power Protect = OFF
Low Voltage Protection = OFF (rely on the flight controller battery settings)
Temperature Protection = 90
Motor Timing = Auto
I followed the instructions on measuring/verifying battery Voltage with 2 multi-meters (cheap one and FLUKE 322) and both matched the HUD displayed Voltage within 0.02 Volts. Unfortunately, the FLUKE only measure AC currents and the cheap one is below 10 amps. I think is about time to look for a mid-level dissent multi-meter maybe analyzer.
The great info. I got from the video was to reverse and switch CW/CCW props to produce downward thrust for testing because the real one is not good for my nerves lol !!!
btw what is your opinion for the choice of motors and props for the X500 frame?
Vendor recommend 2212 900KV motors an 2 blade 1045 props. I thought a 2806.5 1800 KV with a tri-blade 9x5 prop will achieve similar thrust or I am very, very wrong
At this point all tests are halted. I believe something is very wrong with my setup. I have ordered 4 2213 motors and 1045 props and I will re-test then.
Also, this is my very 1st drone, 1st FC, 1st ESC, 1st Arducopter/pilot etc. I am sure I had made some bad parameter entries so I decided to start with a clean slate, and I mean re-flash the FC with a full erase. It’s surprising with the knowledge I have gain (and notes) how fast I configured Arducopter! This resolved some weird issues I had before, like even setting up MOT_SPIN_ARM 0.05 the motors will spin close to 0.15!!! Not anymore!
Now I am looking if my ESC/PCU can be setup for Bi-directional Dshot, I have loaded the bl version of the firmware (arducopter_with_bl.hex)) already. It will be great to get some RPM, V, Amp, temp. data out of the motors.
Anyway, thank you again for the comments and taking the time.
Cheers!
Nikos.
You can just do a “reset to defaults” instead. Also you should flash the bi-directional DSHOT version of the firmware for your flight controller.
It will have “BDSHOT” in the name when you go into the firmware section of MissionPlanner
Then start with:
mandatory calibrations
set up the voltage and current monitoring
Initial Parameters, also select suggested settings (accept everything it offers)
set any other requirements, like
MOT_PWM_TYPE,6
PILOT_THR_BHV,7 if you have a spring-centered throttle
SERVO_BLH_AUTO,1
SERVO_DSHOT_ESC,1
SERVO_BLH_POLES,14 ← check this matches your motors
EDIT: also set SERVO_BLH_BDMASK,3840 to suit your motor connections
And set these:
INS_ACCEL_FILTER,10
INS_HNTCH_ENABLE,1 ← set this then refresh params to see the rest
INS_HNTCH_MODE,3
INS_HNTCH_REF,1
INS_HNTCH_FREQ,80
INS_HNTCH_BW,40
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
There are some reboots required in amongst that - like after setting the battery monitor type.
Do a hover test flight and some gentle pitch/roll movements, then post that .bin log
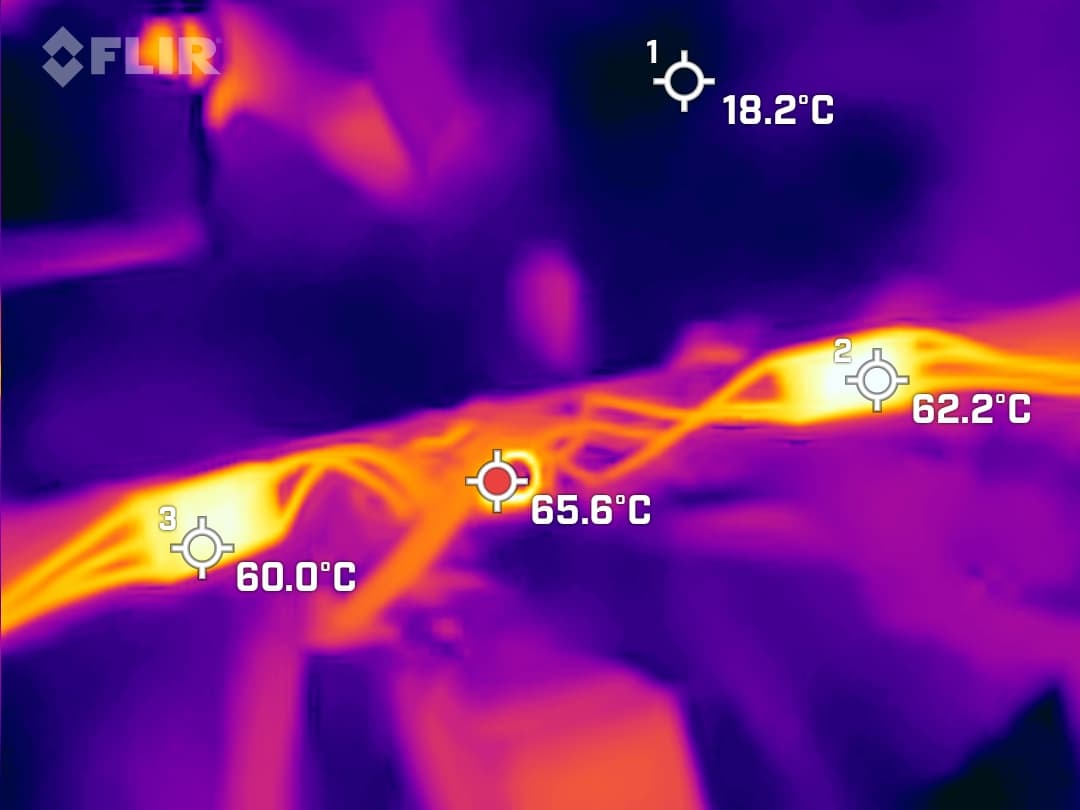
Sorry for the delayed response but finally installed the new motors and was waiting for less windy day as it is been very windy here so the best I could do was a 2 ft hover in the garage (WARNING: anyone reading this DO NOT do that unless your heli/drone feels and looks stable; also I am flying RC helis for 15 years; still not recommended ). Anyway, I had a few short hovers and the motors are barely warm. ESC and capacitor/PDU cold.
I finally managed to calibrate the voltage by extrapolating the actual and HUD readings (BATT_VOLT_MULT). I am working on the Amp. output as I do not have yet a reliable Amp. meter. Until now no “Low Battery Failsafe” but a full outdoor hover is still pending.
I still working getting any readings from the ESCs. Matek support is more gear towards experience electronic users, which I am not, so I gave up on any further help from them. I am working to interpolate the mappings between the FC and PDU to pass to Ardupilot.
I have applied the following:
MOT_PWM_TYPE,6
PILOT_THR_BHV,0 Heli radio JR 12X
SERVO_BLH_AUTO,1
SERVO_DSHOT_ESC,1
SERVO_BLH_POLES,14 ← waiting from seller as was no infromation on the packaging.
SERVO_BLH_BDMASK ← Do not know yet.
INS_ACCEL_FILTER,20 ← Drone has zero visible vibrations. Still lower value to 10?
Holding back on INS_HNTCH_ENABLE until I short out the ESC telemetry.
INS_LOG_BAT_MASK,3 (2 IMUs)
INS_LOG_BAT_OPT,4
I will fully charge all the batteries tonight and tomorrow I will take another hover and post the bin logs.