This might be a silly question, but since it is my first time i work with this ESC (f55A Pro iii) and Pixhaw 6X together, I was wondering if anyone can quickly help me out on how to physically connect this ESC to Pixhawk 6X?
Also, is this the page I should follow for setting up DSHOT and log RPM data?
You should configure for bidirectional Dshot by following the guide in that same link. Starting by flashing the Bdshot version of firmware if you haven’t already.
Connect the ESC signal inputs to the 6X FMU outputs and configure the parameters accordingly. You can connect the Telemetry pin on the ESC to a serial port if you like but RPM data will be coming thru via bdshot.
Use dhot6000
Thank you for your reply.
I still dont understand how ,physically’’ I shall connect them? Pixhawk 6X have a 3 pin PWM port for each motor PWM output and the ESC have a 10 pin connector module.
The ESC already contain a BLHeli32 firmware. Should I still need to flash a DShot version firmware?
One last question, why did you recommend using dshot600 and not 300 or 1200?
You are confusing ESC firmware with Arducopter firmware. You are flashing the Bdshot version of firmware to the Flight Controller. You can find it here Pixhawk 6X
Download the .apj file and flash it with Mission planners “load custom firmware”.
4,3,2,1 are the ESC signal inputs from the Flight Controller FMU outputs.
T is telemetry connected to the Flight Controller serial port (Rx)
C is battery current that can be connected to a battery monitor input but I suppose you have a power module providing current data so not needed.
– ++ are battery level output voltage pins also probably not needed. But, connect a lead from one of the “-” terminals to any ground pin on the Flight Controller output rail.
Dshot600 is generally the most stable prototcol unless you are on the main outputs.
These are very basic questions, you should start here: Arducopter Initial Setup
And once everything is connected go here The Configurator The new Arducopter users best friend.
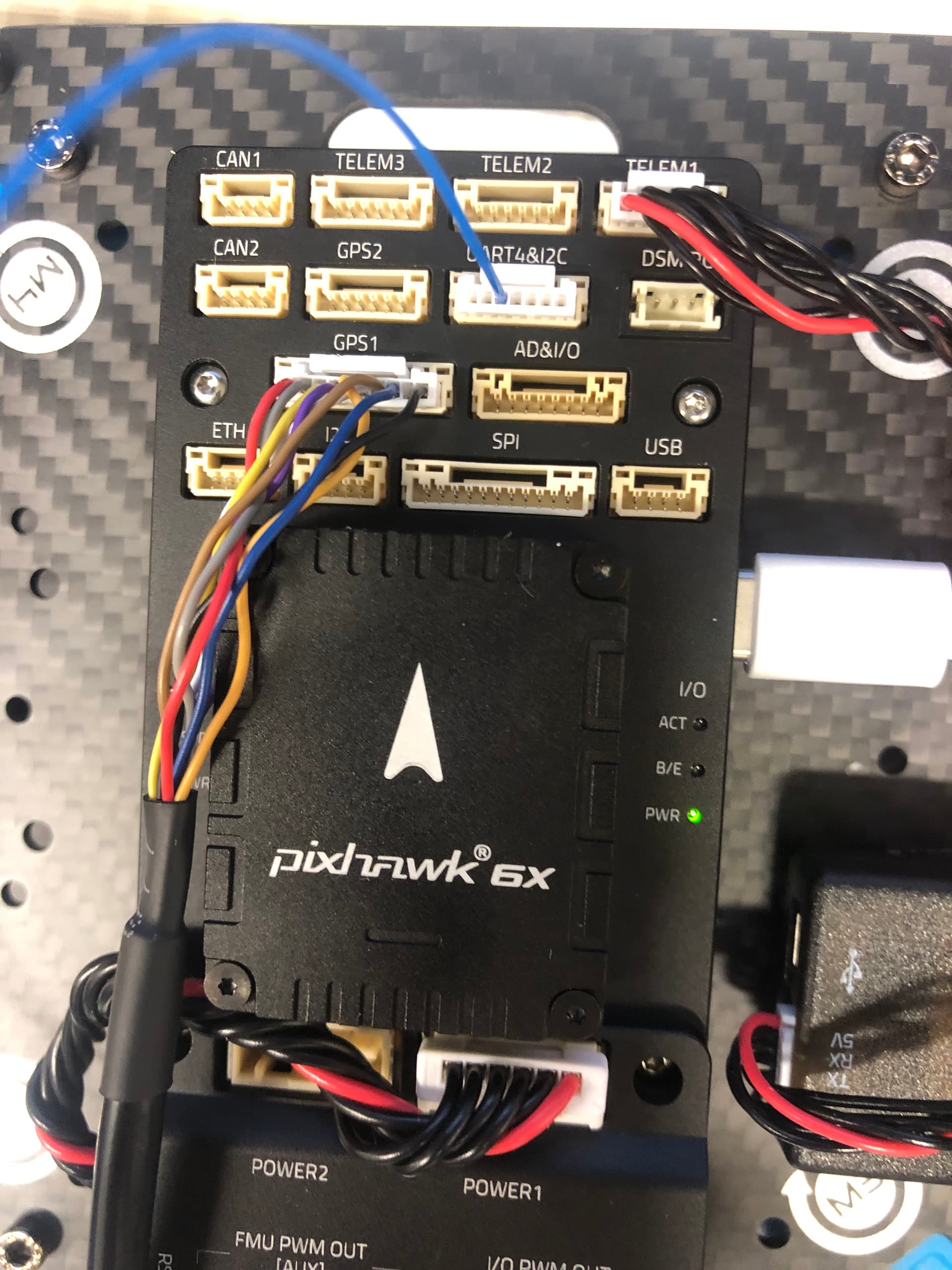
I am facing a difficulty with the ESC Telemetry configuration. I just want to double check if what I have connected so far is correct.
I have connected 4,3,2,1 to I/O PWM out and ‘-’ to the one of the ground in pixhawk. Also ‘T’ is connect to UART4&I2C (Rx - 3rd Pin input, to the pixhawk). Could you please confirm if my connection is correct? I am asking because I am struggling to connect to the ESC using BLHeliSuite32. Thank you!
This is what I have already set but it did not work. Also I have flashed the firmware you shared the link with me which is Bdshot version. I have attached the param file and below you could see some ‘Messages’ occured when I connect to the controller:
09.10.2024 09:42:38 : PreArm: Battery 1 unhealthy
09.10.2024 09:42:38 : PreArm: Compass not calibrated
09.10.2024 09:42:38 : PreArm: 3D Accel calibration needed
09.10.2024 09:42:38 : PreArm: Hardware safety switch
09.10.2024 09:42:38 : PreArm: RC not found
09.10.2024 09:42:07 : PreArm: Battery 1 unhealthy
09.10.2024 09:41:36 : PreArm: Compass not calibrated
09.10.2024 09:41:36 : PreArm: 3D Accel calibration needed
09.10.2024 09:41:36 : PreArm: Hardware safety switch
09.10.2024 09:41:36 : PreArm: RC not found
09.10.2024 09:41:06 : PreArm: Battery 1 unhealthy
09.10.2024 09:41:06 : PreArm: Compass not calibrated
09.10.2024 09:41:06 : PreArm: 3D Accel calibration needed
09.10.2024 09:41:06 : PreArm: Hardware safety switch
09.10.2024 09:41:06 : PreArm: RC not found
09.10.2024 09:38:30 : Frame: QUAD/X
09.10.2024 09:38:30 : IMU2: fast, high-resolution sampling enabled 3.2k
09.10.2024 09:38:30 : IMU1: fast, high-resolution sampling enabled 3.2k
09.10.2024 09:38:30 : IMU0: fast, high-resolution sampling enabled 3.2k
09.10.2024 09:38:30 : RCOut: DS600:1-4 PWM:5-16
09.10.2024 09:38:30 : IOMCU: 410 2003 411FC231
09.10.2024 09:38:30 : Pixhawk6X-bdshot 0044001B 3532510C 30373630
09.10.2024 09:38:30 : ChibiOS: 6a85082c
09.10.2024 09:38:30 : ArduCopter V4.5.6 (7ce11b41) first_config.param (17.9 KB)