The F450’s can be surprisingly hard to get flying properly.
Try to work through all this in it’s entirety. Don’t just try changing a few settings and flying again, do everything here if possible.
If it’s not already, see if you can set your transmitter to spring-centered throttle. This is not essential but helps to avoid “I switched to stabilise mode and it fell like a rock”. If you can, or it already is spring-centered, then set this:
PILOT_THR_BHV,7
Your battery monitor is calibrated wrong or most likely your battery is sadly depleted, it’s going quite low in these small tests and will get permanently damaged. After changing all the settings I recommend below, if you get battery warnings or cant arm DO NOT change the battery related params, change the battery.
It’s hard to say with all that oscillation going on, but it might be underpowered too. We will find out more later.
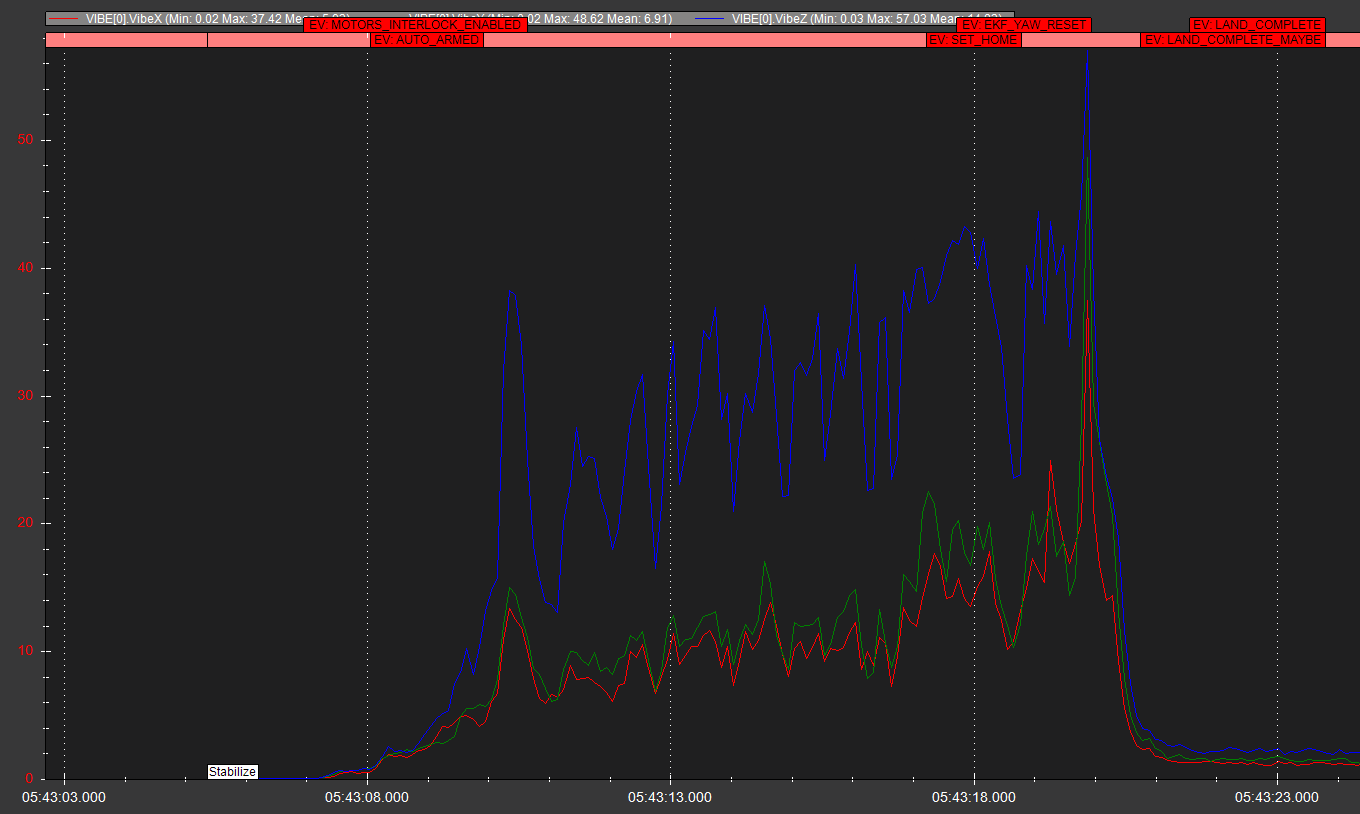
There is bad vibrations and clipping, mostly you need to worry about Z axis. Dont fly again until you take actions to fix this. This could be flight controller anti-vibration foam, or you might need a mount with balls.
You could balance your props to clean up the X and Y axis too. With the cheap F450 kits some have found the motors need balancing too.
Tidy up any wiring or anything that might be loose and vibrating or flapping around in the prop wash. You want the X and Y vibes under 10 if possible, and Z axis vibes under 20 (or under 15 if possible).
Stay with
Stabilise mode until you are sure the vibrations are fixed.
Later you will want AltHold and Loiter modes.
Update MissionPlanner, latest beta
Connect to MissionPlanner and go to the Setup and Initial Parameters, plug in your prop size and battery cells, select the optional battery failsafe settings too, accept everything it offers and save those parameters. (Don’t select the T-Motor Flame ESC settings)
Change these params, this should make a relatively safe starting point for a F450
ATC_ACCEL_P_MAX,85000
ATC_ACCEL_R_MAX,85000
ATC_ACCEL_Y_MAX,16000
ATC_ANG_PIT_P,12.0
ATC_ANG_RLL_P,12.0
ATC_ANG_YAW_P,6.0
ATC_INPUT_TC,0.20
ATC_RAT_PIT_D,0.006
ATC_RAT_PIT_I,0.11
ATC_RAT_PIT_P,0.11
ATC_RAT_RLL_D,0.006
ATC_RAT_RLL_I,0.11
ATC_RAT_RLL_P,0.11
ATC_RAT_YAW_I,0.08
ATC_RAT_YAW_P,0.8
AUTOTUNE_AXES,3
GPS_GNSS_MODE,65
INS_HNTCH_ENABLE,1
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,0
MOT_SPIN_ARM,0.10 ← check for reliable start up of all motors
MOT_SPIN_MIN,0.13
You can copy/paste these into a text file (notepad.exe) and save as a .param file, then load it via mission planner to avoid any typing errors. Obviously not my comment though, cut that out.
I would also set FENCE_ENABLE,1 and check the other fence params. This will force you to wait a while for a good 3D Fix before you can arm. You get used to it and is worth it to know you’ve got a good home point set.
After looking into vibrations and sorting that out as best as possible, and setting all the other params, do a hover test flight for a minute or two in Stabilise mode. Cautiously test the pitch and roll. If everything goes really well also try AltHold mode. Post the .bin log file from that flight and we’ll go over some more.