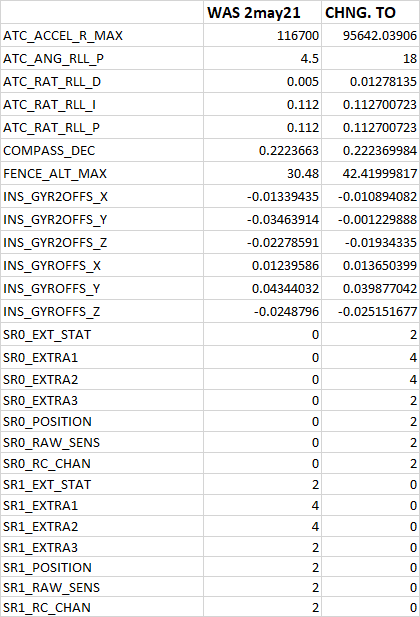
You are comparing old Yaw values from before the yaw Autotune. No yaw values were changed in that Roll Autotune.
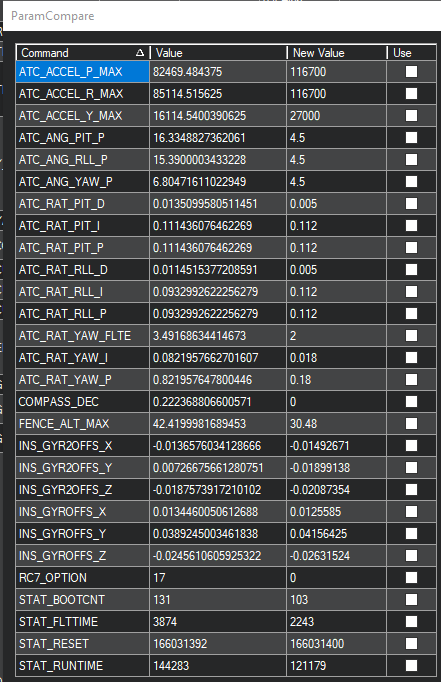
See how high that ATC_ANG_RLL_P can go? With manual tuning most people would never try values that high, they would probably make more changes to the ATC_RAT values.
See how little the ATC_RAT_RLL values changed? Except D term came up to be only a tenth of P and I - we nearly had those correct!
You will be able to set all these before the next Autotune and it will go quickly. I haven’t asked for them to be exactly the same as RLL values, but they will be close enough to ensure safe flight AND a quick Autotune.
OK, I will set the you suggested (below) before the next AT Pitch only flight, then follow up with a all three axis AT:
ATC_RAT_PIT_D,0.01
ATC_ANG_PIT_P,16
ATC_ACCEL_P_MAX,95000
Roll attitude is definitely working well in that log - now to get Pitch the same.
Yaw is pretty good too, but you might still want to bump up ATC_ACCEL_Y_MAX a couple of thousand or so.
Oh and I meant to say: with those D term values relatively high keep checking motor temperatures for the first couple of flights - they should be warm to the touch at most, or preferably cool. Never hot!
And dont forget ATC_THR_MIX_MAN,0.5 - it just gives you more manual throttle control after initial testing phases. It’s the default value, and we lower it for safety during set up.
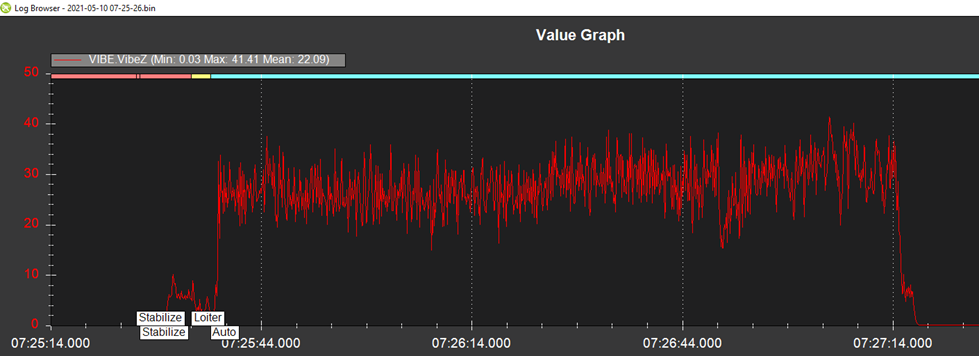
Hey Shawn, I conducted the AT Pitch only, and then the AT All Axis (only required about 5 min. for the full AT All Axis). Looks like the AT went well. Unfortunately, on landing after the All Axis AT the Quad pitched backwards (landing on small dia. gravel) and chipped the #2 and #4 props. I replaced the props prior to the Post AT All Axis test flight, and now I have a Z axis prob. that I need to resolve.
Yes apart from the suspect Z vibrations everything else is really good. I would leave the tuning, see what you can do about the Z vibes and then just get up a bunch of flight time.
Hey Shawn, checking in: The 1st Auto flight went well, I can see / hear the difference in the Quad (Pixhawk 3DR ver Pixhawk Clone).
Still fighting the Z Vib. I should have been able to replace the #2 and #4 props (props. pre-balanced before installing on the motors) with the mark on the motor aligned with the mark on the prop and get about the same low Z vib I previously had. But that is not the case. So, I went back through the vibration measurement setup. Put a vib. monitors on the #2 and #4 Quad arms and a vib. monitor on the Pixhawk. Got about the same readings as when I previously setup (and significantly reduced) Z Vib. But it is not working this time!!?? I will have to try something else.
Do you think I am reasonably safe to be flying Auto missions with the Z Vibs as high as they are (no clipping)?
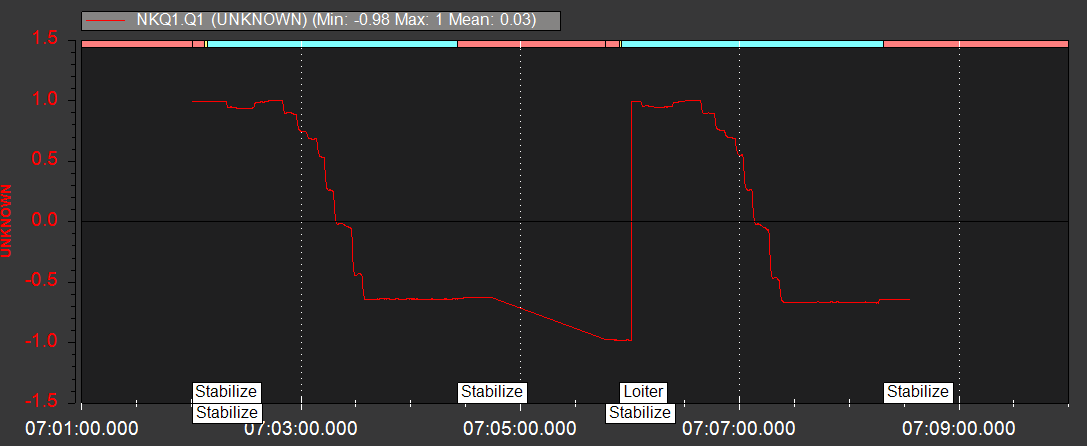
More Questions: I flew 2 consecutive Auto flights this morning. What is odd is the .bin file does not show the Auto Mode, yet the Quad flew the waypoints without issue? Here is the NKQ1 and as you can see know Auto mode??
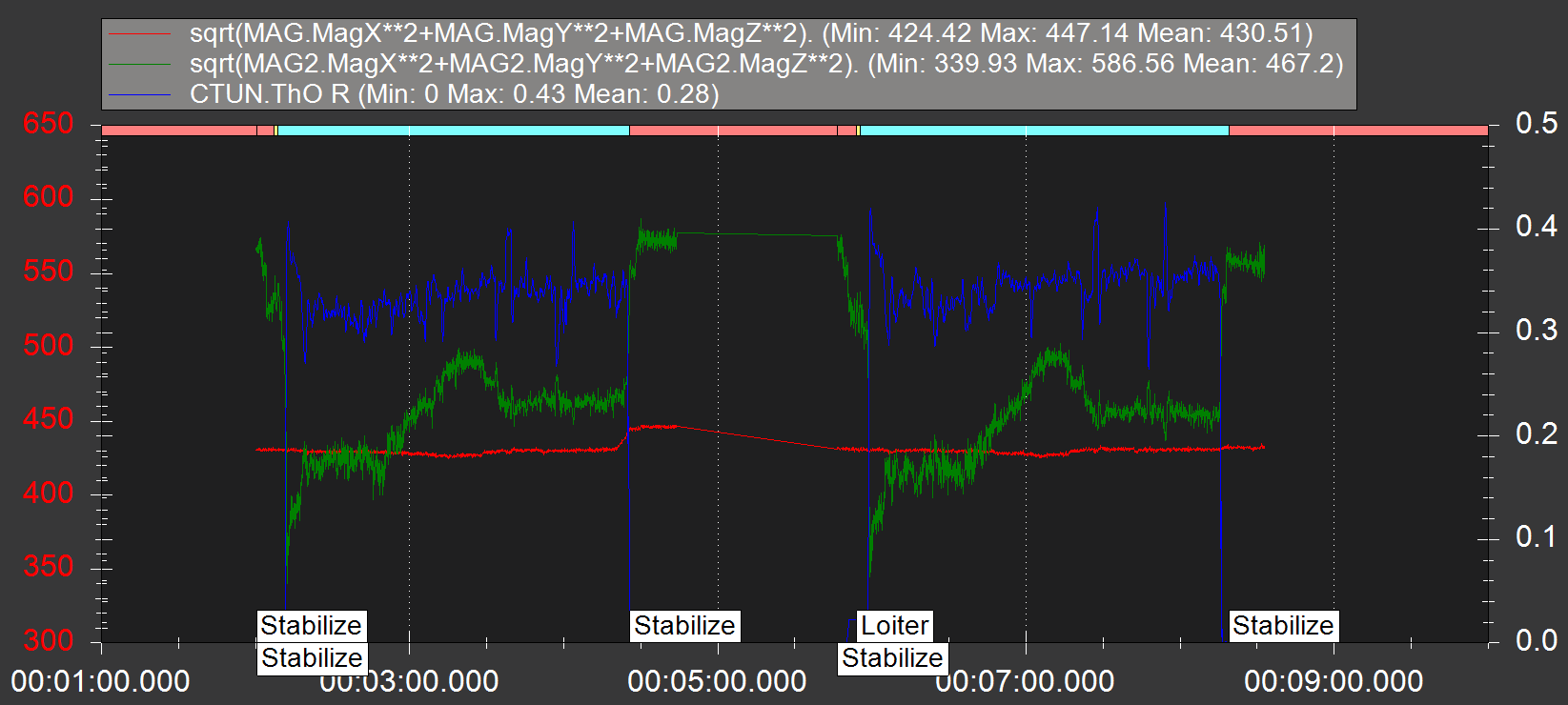
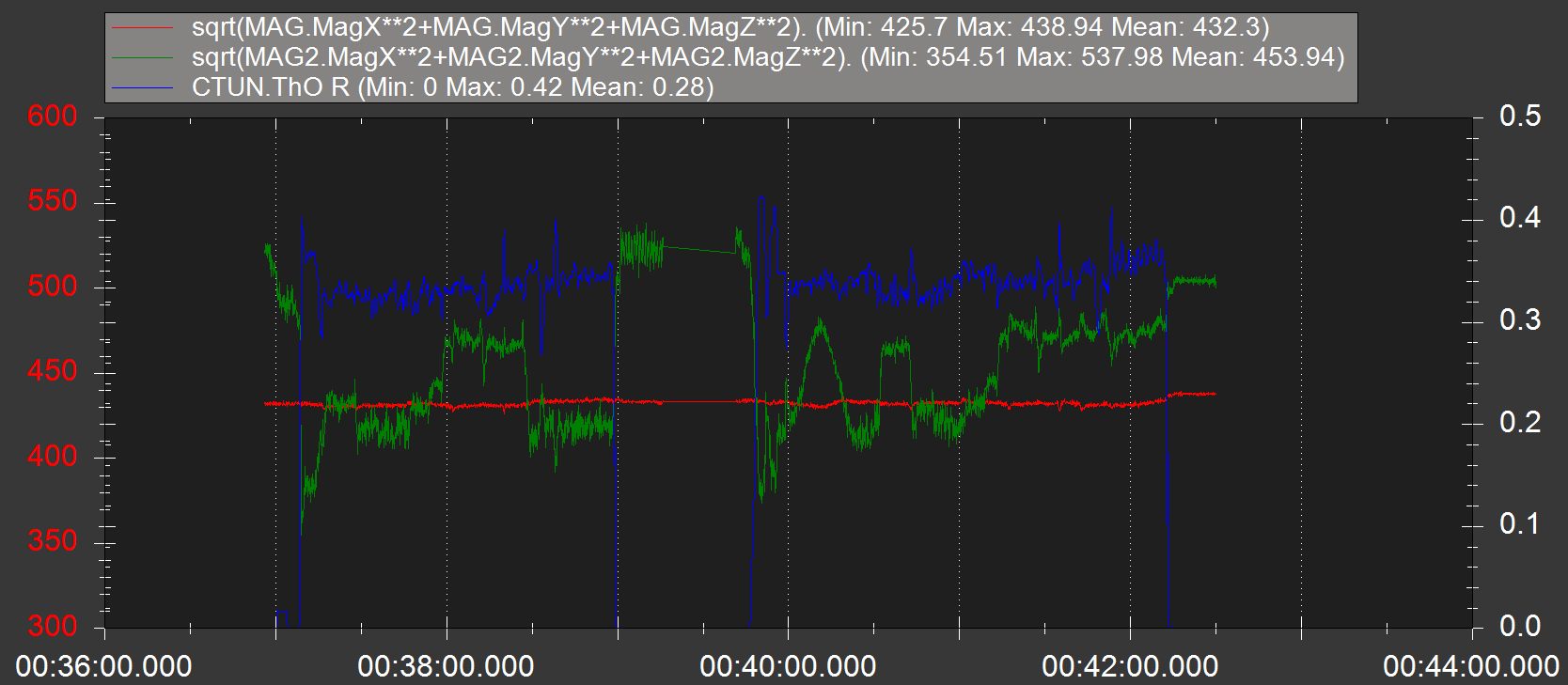
There’s a fair bit of interference with Compass 2 (the onboard one) with throttle. Set this parameter to ignore it: COMPASS_USE2,0
You can see in this graph Compass 1 (Red line) hardly deviates with throttle (Blue line), but Compass 2 (Green line) is all over the place - not the worst we’ve seen though
EDIT: Z vibrations are definitely getting into that grey area of not being sure if there could be adverse affects. You’ll have to try your motor and prop balancing tricks again, or check the flight controller mount and wiring.
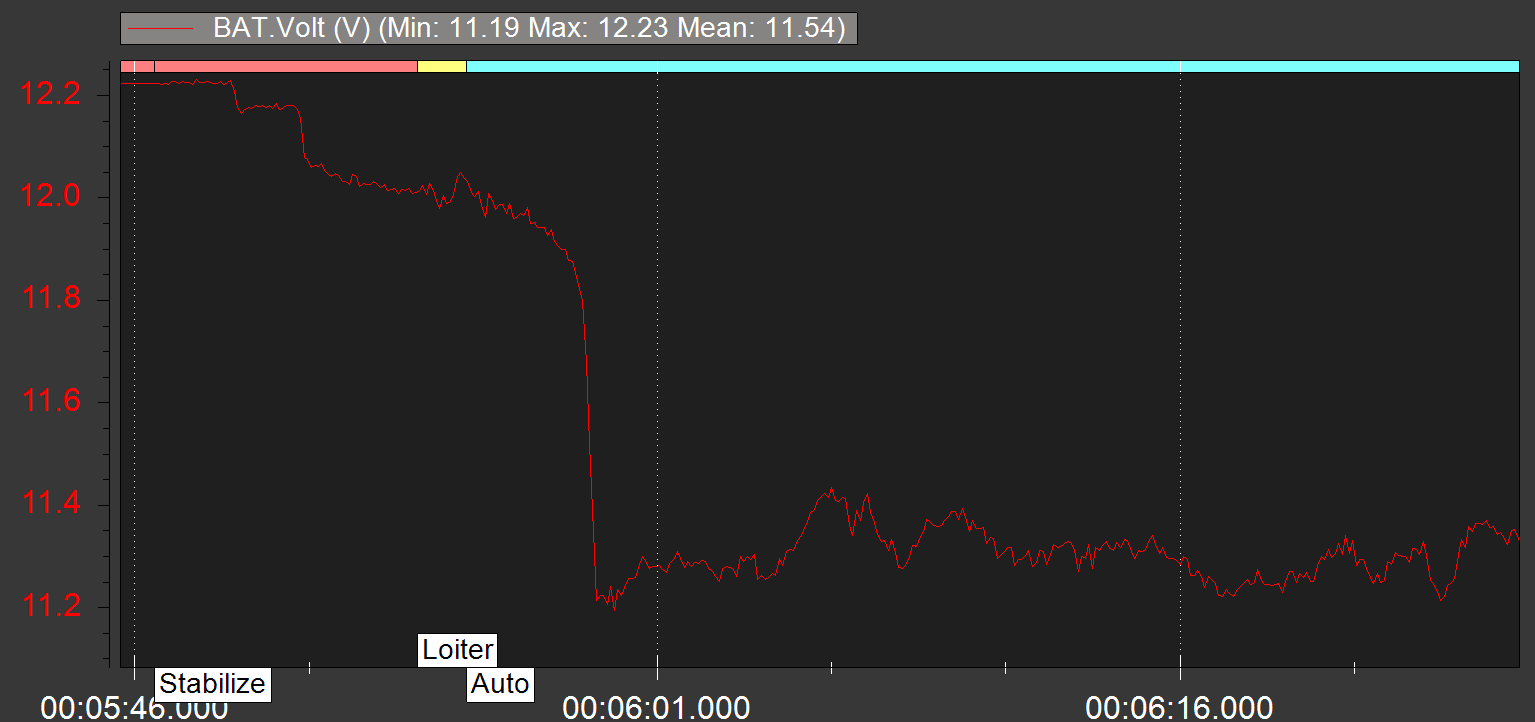
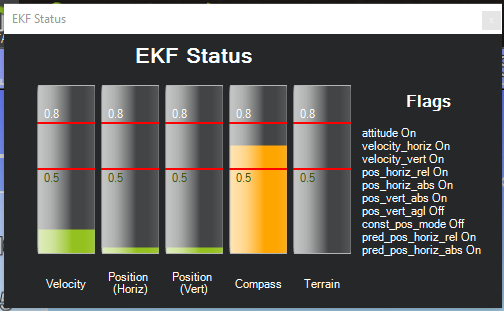
Hey Shawn, well conducted a few Auto flights after disabling COMPASS_USE2,0 (the Orange HUD EFK annunciation issue) and I have not seen any Orange EKF in the HUD. The Auto flight this morning I did see Orange EKF in the HUD once again (about 60% of the flight when the Orange EFK showed up) 7:54:31 was the time tick when the Orange EKF annunciation showed up.
Strangely the only thing that seemed to change at exactly that time was GPS horiz and vert accuracy, both degraded slightly and sharply, then gradually recovered. Although compass innovations did also change a little.
This setting might improve GPS consistency
GPS_GNSS_MODE,65
by limiting the constellations to GPS and GLONASS. Most GPS receivers get overwhelmed by more than 2 constellations and update rate goes down.
Then take the quad outside and wait for a good GPS 3D fix, HDOP less that 1.0, usually down around 0.7 - then run the Compass calibration procedure again.
You can safely set this for improved manual throttle control
ATC_THR_MIX_MAN you can set to 0.5
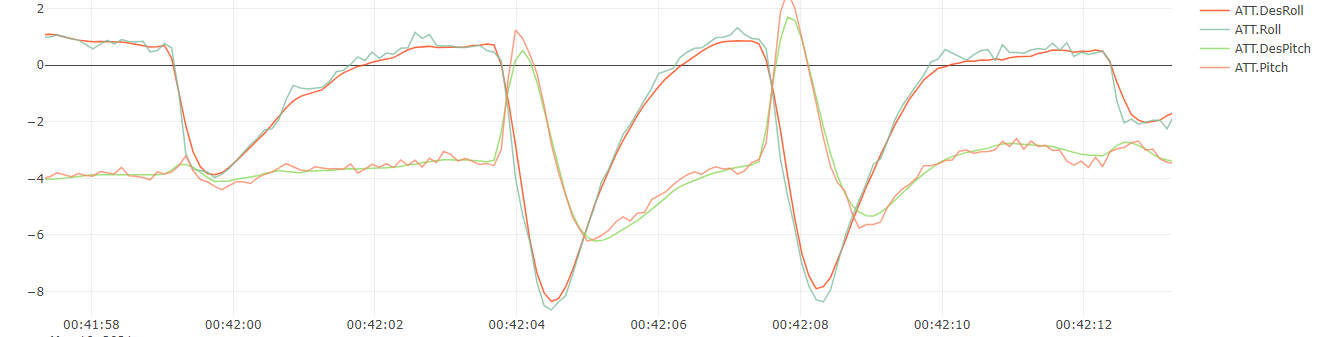
It’s not a big deal, but there’s still a very small oscillation happening in pitch and roll. To me it shows the signs of a D term being too high, which yours do seem to be…
You could try these to smooth out the pitch and roll a tiny bit, it should be totally safe because this is a very tiny change to D terms
ATC_RAT_PIT_D 0.009
ATC_RAT_RLL_D 0.0078
I’d be interested to see a .bin log after changing those.
Hey Shawn, well post recal. of the external compass (and possibly the GPS change: GPS_GNSS_MODE,65?? the compass interference issue seems to have gone away?!
One thought, I only noticed the compass interference while in Auto mode, and in Auto mode the external speaker (Pizeo device) is active annunciating each WP crossing. Do you think this may be the cause of the compass interference?
Flight was Stab. followed by long loiter (apprx. 7 min flight), flight begins around 7:01:19 and ends around 7:07:19.
1 - No hint of HUD Red EKF issue!
2 - The change to the ATC_THR_MIX_MAX,0.5 seems to provide a much smoother with more precise control of the Quad’s altitude. Great suggestion (I realize you suggested this several days ago but I prefer to do things piecewise so that I can more easily identify an induced problem).
3 - I did see a small amount of oscillation on descent (could have been the Quad flying through its own prop. wash).
Questions:
1 - Since the compass interference seems to be gone should I try re-enabling the internal compass and recal both compasses?
2 - When you analyzed the .bin and spotted some oscillation what param were you looking at?
3 - I am wondering how the compass interference has just vanished. Any thoughts on that?
Hey Shawn, in addition to yesterdays flight (no signs of the HUD EKF Orange), even when I activate the Piezo device during flight!
1st Flt (Auto) ARM 7:36:57 – 7:39:05; no HUD Orange EKF (EKF running at or below .25); 2nd Flt (Circle Mode then Auto) ARM 7:39:42-7:40:26 Circle, no Orange EKF (EKF running at .15). Continuation of 2nd Flt (Auto after completing Circle, did not land, in air Auto) 7:40:31 – 7:42:17 no Orange EKF, EKF running around .1 to .15. .bin and Tlog: https://drive.google.com/drive/u/0/folders/1oJu4VgNgmyL_zD6jq1j20pBN_rVmGqK6
Another question, in the HUD, while in AUTO Mode, the HUD shows (lower right corner “Auto” ) the altitudes shown here are significantly different than the actual altitudes. Why is that?
Hi Greg, I meant to get back to you sooner
There is often some wobbling while descending through your own prop wash. The only things to do are descend slower or descend at an angle. The wobbles are worse when tuning is bad - one of the signs to look out for!
don’t enable the onboard compass, it’s not needed when you have a working external compass and will only make things go bad again
I was probably looking at the pitch and roll attitude - see how big movements are nice and smooth and follow Desired very well (P terms are correct) and yet there’s all these little wobbles when there should be almost no change (D terms too high) - this is my interpretation
Changing one thing at a time is a good habit to get into. You don’t need to change the D terms as I suggested since your quad is doing very well. It’d just be nice to see what effect it has on those tiny rogue movements.
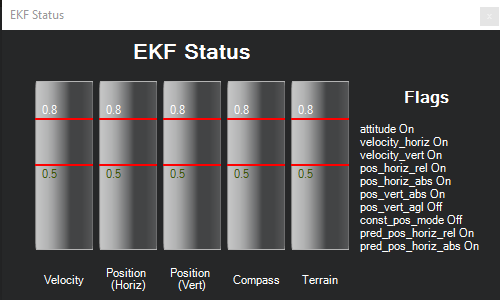
Do you have any thoughts on why the ext. compass has suddenly gotten better i.e. no more HUD Orange EKF, compass well below 0.5 orange warning level? Only change were those few params you suggested and recal. of ext. compass.
Also, in the HUD, while in AUTO Mode, the HUD shows (lower right corner “Auto” ) the altitudes shown there are significantly different than the actual altitudes. Why is that?
Hey Shawn, on an Auto flight Sat. 22may, while executing an Auto Land (RTL) I noticed a larger amount of oscillation on descent. Not only during the initial phase of the descent (when prop. wash is a factor) but this oscillation continued through the entire Auto land even during the last few feet when the descent was very slow. I have never seen that before. Usually any oscillation stops when the Quad enters the final phase (slow descent phase of Auto Land RTL, last few feet). Any params that I might adjust to reduce this oscillation?
Also troubling, after completing the Auto Land I attempted to stop the motors i.e. TX Thrtl. Stick lower right corner, the props continued to turn for several seconds after issuing the stop motor command. Again this is out of the ordinary, usually the props stop nearly immediately.
About the oscillation on descent, I’d suggest changing the D term just a fraction as per the “try next” section below. Definitely only do a short test in ALTHold for no more than a minute or so then check motor temperature. After autotune
ATC_RAT_RLL_P,0.0933
ATC_RAT_RLL_I,0.0933 ATC_RAT_RLL_D,0.01145
ATC_RAT_PIT_P,0.111436
ATC_RAT_PIT_I,0.111436 ATC_RAT_PIT_D,0.0135
Try next
ATC_RAT_RLL_P,0.0933
ATC_RAT_RLL_I,0.0933 ATC_RAT_RLL_D,0.01166
ATC_RAT_PIT_P,0.111436
ATC_RAT_PIT_I,0.111436 ATC_RAT_PIT_D,0.0139
I can see the props kept running but I cant see exactly why (Land is not complete). Maybe that will fix itself if we smooth out those oscillations. I’ve noticed with our set ups those sort of propblems went away with better tuning.
The alternative is set a RC channel to be the Motor Emergency Stop with RCxx_OPTION,31
The downside is it needs a dedicated switch and channel which may be a problem with some radios - and you never want to switch it accidentally!
Hey Shawn, modified the ATC_RAT’s and a very small amount of oscillation is detectable during descent. So, I am good with the way it is now. Also, conducted another go at the Vib. reduction (I was not happy the amount of Vib., although it was not to bad). The Vib is now significantly reduced! Also, no more HUD EKF alerts!?
Now finally moving on to pic. taking. Thanks again for all your great help!
2nd I perform a Dynamic balancing, I use a cell phone with a vib ap attached to the Pixhawk (4 nylon stand offs with double stick tape on the ends). Secure the Quad to the work surface with C Clamps attached to each landing strut leg. Use MP to run each motor one at a time and measure the vib for each prop mounted at four locations on the motor (0, 90, 180, 270 degrees). This identifies which location will produce the least amount of vib for the prop/motor.
What I have found is contrary to expected outcome. You would expect that once you do this dynamic bal. the prop could be replaced with another prop. using the same location on the motor. This does not seem to work, have not exactly figured out why as yet.
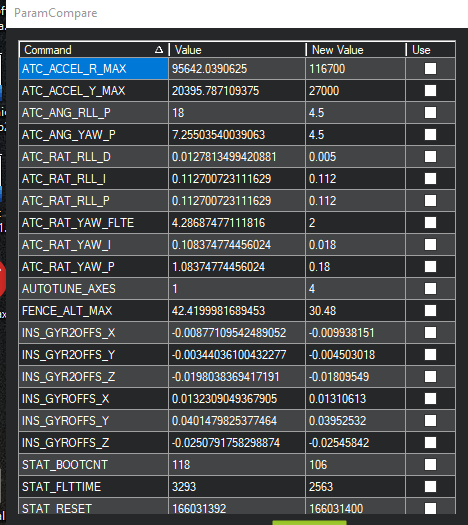
 With manual tuning most people would never try values that high, they would probably make more changes to the ATC_RAT values.
With manual tuning most people would never try values that high, they would probably make more changes to the ATC_RAT values.