Hi,
I’ve been using Pixhawk flight controller on an F-450 frame. The copter crashed suddenly while flight and Im trying to investigate the reason. The Mission Planner Log Analyzer gives me following report,
Log File C:\Users\MM\Documents\Mission Planner\logs\QUADROTOR\1\2020-11-11 14-59-08.log
Size (kb) 4176.0029296875
No of lines 50040
Duration 0:02:25
Vehicletype ArduCopter
Firmware Version V4.0.3
Firmware Hash ffd08628
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = UNKNOWN - No ATUN log data
Test: Brownout = GOOD -
Test: Compass = FAIL - Large change in mag_field (90.29%)
Max mag field length (596.79) > recommended (550.00)
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = FAIL - ERRs found: FLT_MODE CRASH
Test: GPS = GOOD -
Test: IMU Mismatch = WARN - Check vibration or accelerometer calibration. (Mismatch: 0.97, WARN: 0.75, FAIL: 1.50)
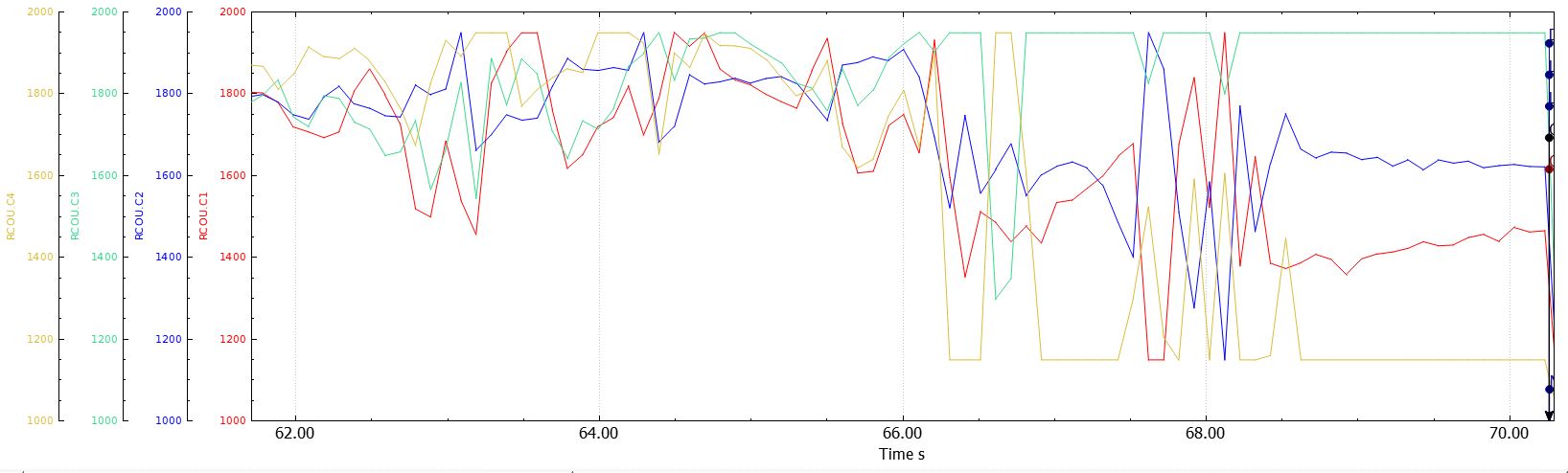
Test: Motor Balance = GOOD - Motor channel averages = [1092, 1102, 1107, 1096]
Average motor output = 1099
Difference between min and max motor averages = 15
Test: NaNs = FAIL - Found NaN in CTUN.TAlt
Found NaN in CTUN.DSAlt
Test: OpticalFlow = FAIL - FAIL: no optical flow data
Test: Parameters = FAIL - ‘MAG_ENABLE’ not found
Test: PM = GOOD -
Test: Pitch/Roll = UNKNOWN - ‘BarAlt’
Test: Thrust = GOOD -
Test: VCC = UNKNOWN - No CURR log data
The log file for the same has been attached herewith.
https://drive.google.com/file/d/1XTch6ZOR4dZpCijXUTVwYyU0jeP7CDEm/view?usp=sharing
To me it seems a hardware issue with one motor/ESC failing. If there is any other error please let me know.
Thanks in advance