Since discovering the FrSky Horus series transmitters and their compatibility with passthrough (Yaapu) telemetry, I’ve been pretty sold on that ecosystem.
However, FrSky is increasingly frustrating and driving toward closed source while ELRS 3.0 seems like the greatest thing since sliced bread! Full 16 channels, excellent range, passthrough telemetry support, simplistic binding, cheap hardware…
I’ve been mostly bench testing ELRS but installed it on my mower today (R9M-based) and had outstanding performance, including passthrough telemetry…what am I missing?! Talk me out of it!
I have several craft on R9 and a couple on CRSF which I was considering transitioning all to. What Tx module are you using? Perhaps I’ll check it out before deciding on the switch. CRSF hasn’t been a walk in the park.
On the actual Rover, I’m using an R9M flashed with ELRS 3.0-RC1 (I should update) along with an R9MM receiver. It performed admirably during my mowing today with flawless telemetry updates and no issues controlling at any reasonable range.
Before installation, I range tested it to 670m on the surface, through multiple obstacles and terrain masking.
Did the same test with a HappyModel 2.4GHz 1W module and EP1 receiver - got a bit beyond 400m at 100mW before the signal degraded quite a bit.
I also successfully set up a BetaFPV 2.4GHz 1W module with a Matek 2.4GHz RX but did not range test that combination (yet).
My “bench” tests are geared mostly toward Rovers, so the ranges are intentionally limited by obstacles and terrain. I imagine airborne vehicles with more direct LOS would achieve orders of magnitude better range.
Installation was very straightforward, both on a Matek H743 board, Cube Orange, and QioTek ZealotH743. Follow the wiki(s), and all works as advertised.
I have had zero failsafe’s when using ELRS its amazing and the form factor is impossible to beat. I am just to lazy to swap all my quads over haha, but any new builds will be with elrs and when and if mavlink support gets added it will be crazy which I have read and am following a cpl pull request for just that.
how do you have your telemetry set up is it just emulating frsky? I have recently won a r9 module for £16 off ebay and im looking out for a cheap receiver, i need something to replace my openlrs system.
plan A was OlliW’s mavlink firmware but its not in a usable condition at the moment so ELRS running passthrough is plan B.
With the official release of ELRS 3.0, I’m transitioning nearly all of my vehicles to ExpressLRS. The process has been largely painless.
@geofrancis, I’m using ELRS (CRSF) passthrough to the transmitter (Horus X12S or Radiomaster TX16S) on all models. Most of them have another dedicated telemetry radio for GCS connection - most often, an mRo 915MHz setup.
In some cases, it’d be nice to have the transmitter be the comms link to the GCS as well (via Olli’s project), but most of my use cases don’t really lend themselves to keeping the transmitter right next to a GCS computer.
In some cases (my “Cinewhoop” styled quadcopter, in particular), I simply skip the GCS entirely in favor of read-only telemetry on the TX + plenty of channels for control.
Cool, there has been some good news from ollis mavlink rc project, they finally got to the bottom of the r9 problems, something to do with it wrapping a 16 bit timer so it should be working now hopefully. I have asked if he can support a r9 module as a receiver so i can have symmetrical power on the link rather than a 25mw rx connected to a 1w tx and he is looking into it. The only options for a high power rx at the moment is dragonlink or rfd900 but both are very expensive.
Im looking for a backup to a 4g link so it doesnt have to be fast it just has to work and my old openlrs modules are just not reliable enough. Im looking at another option of injecting rc into a telemetry link for rc but its not ideal.
Since I had a MiniPix1.0 on the shelf and was uodating all my ELRS2.4 gear to Version 3.2, I thought, why not give ArduPilot a try again. From 4.0. Heli (Frsky D16 /R8) to Arduplane 4.3.4
and ELRS3.2.
Worked quite well all I have do, is find a test object.( all wings and one gliders are on ELRS and Inav)
For this reason I tried to setup Arduplane as close as I am used on the other system.
ELRS.2.4GHZ
2 Switch arming CH5
PWM5 out is working on a different channel now (CH6)
Transmitter failsafe works ( GS and GPS disabled)
5 Yaapu 2.0 telemetry ( on Tx16s and QX7)
6 Yaapu maps only on TX16s…
7 Crossfire parameter ( on the fc) can be changed on both transmnitters.
8, 29 telemetry sensor…
The transmitter failsafe works excellent, as soon as the transmitter is switched off, Yaapu reports failsafe, cricle and rtl. Switching it back on…failsafe is cleared and back on the former flight mode.
Edit: Hardware is a TX16s and a QX7, the receiver in this test a simple HM EP1, TX mobules are HMtx24 and a modded Siyi FM30, which were able to fly over 10km at 10 to 50mW output with a modded Siyi Mini receiver on ELRS 3.01
I also have a MiniPix V1.0, but don’t seem to be able to get it to run anything other than the RadioLink Airplane 3.8.5 firmware… every time I flash ArduPlane 4.3.4 and ArduCopter 4.3.4 it flashes, but then doesn’t startup properly again. Can you give me any pointers (other than finally binning this thing and using the Matek 405-Wing instead (since I have two of them)?
My apologies, I was replying to the prior comment since @amax_honk mentioned he was using a MiniPix 1.0 and first 4.0 and then current firmware versions (and given I’m using supposedly the same hardware revision, I’m wondering how he did it). While I generally agree as to the reputation of radiolink minipix (and sordid history), there is also nothing particularly special about the hardware, so I’m puzzled as to why it doesn’t work when it should. I just don’t want to chuck it to only later find out it is just a matter of flashing a specific firmware file, or resetting a MCU fuse setting.
btw, bringing this back on topic, you may be interested in following the ELRS development (PRs) for telemetry link (Airport) and SBUS connection…
please point me in this direction I use to be following but somehow lots the pr. I just went through the process of upgrading all my elrs to 3.2.0. you guys have really out done yourselves again!! I wouldn’t chuck it just yet might be useful for a non-air vehicle or antenna tracker. from what i remember you had to flash it with firmware from their website. I am not sure but I don’t think the latest firmware will work due to them not working with ardu folks.
Since I left mostly all Sbus gear behind ( last one was Frsky9 on a glider, now on ELRS) , I am now full on FPV. The ELRS usability on this MiniPix took my interest. Using two telemetry ports,
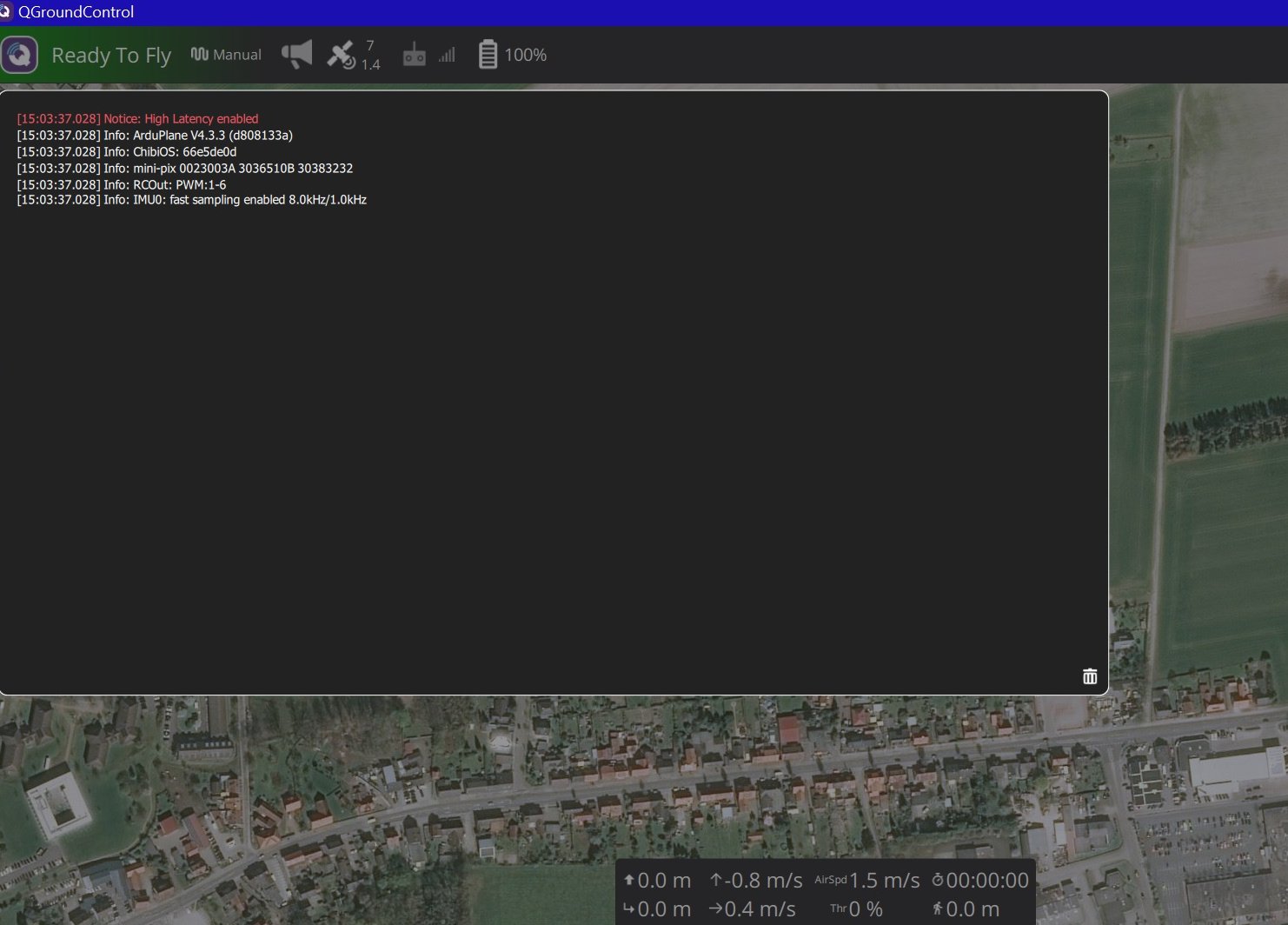
for rc and bluetooth telemetry(MissionPlaner& QGC) ,was all I needed. The bit setting of bit 8, 9 and 13 for the protocol took a while for me to discover, My main idea was to test my Walksnail digital system on this controller. ( no osd chip) instead on a spare F765…
I attached a screenshot from QGC with some hardware infos. ( ChibiOS)
You my be right, but my little fc worked dozens of hours on the bench and in the garden with the
4.0.4 heli firmware and now with the plane firmware, without any flaws.
It looks like they have released ExpressLRS V3.3.0-RC1 which includes support for airport mode which from my reading is a bi-directional telemetry link and it requires separate hardware for the airport module and elrs rc link.
Well now I have a new feature to test! Been a long time coming to get a viable bi-directional link over ELRS, even if it does require a little extra hardware.
with the size of these modules haha it is zero cost and all benefit started flashing everything to 3.3 and getting airport installed on cpl modules and rx also looks like you can control dji rs pro gimbals via can bus on elrs. this protocol now has zero reasons to be used now with airport support. i am toying with mlrs but its not eve close to as easy as elrs!!!
I have continued to be dismayed at the extreme resistance to MAVLink or bi-directional telemetry by the ELRS team. Olli did some great legwork and, at least from what I’ve seen, was scoffed by the ELRS folks. This is either a big change of heart or big misperception on my part. Either way, excellent!
I like mlrs its just a bit harder but great system overall. looks like i need to snag a cpl 900 mhz stuff to make airport mode worthwhile. from what they are saying if you do rc and airport on same freq you only get about 1km range but if you do elrs on 2.4 and airport on 900mhz then they had solid link up to 30km