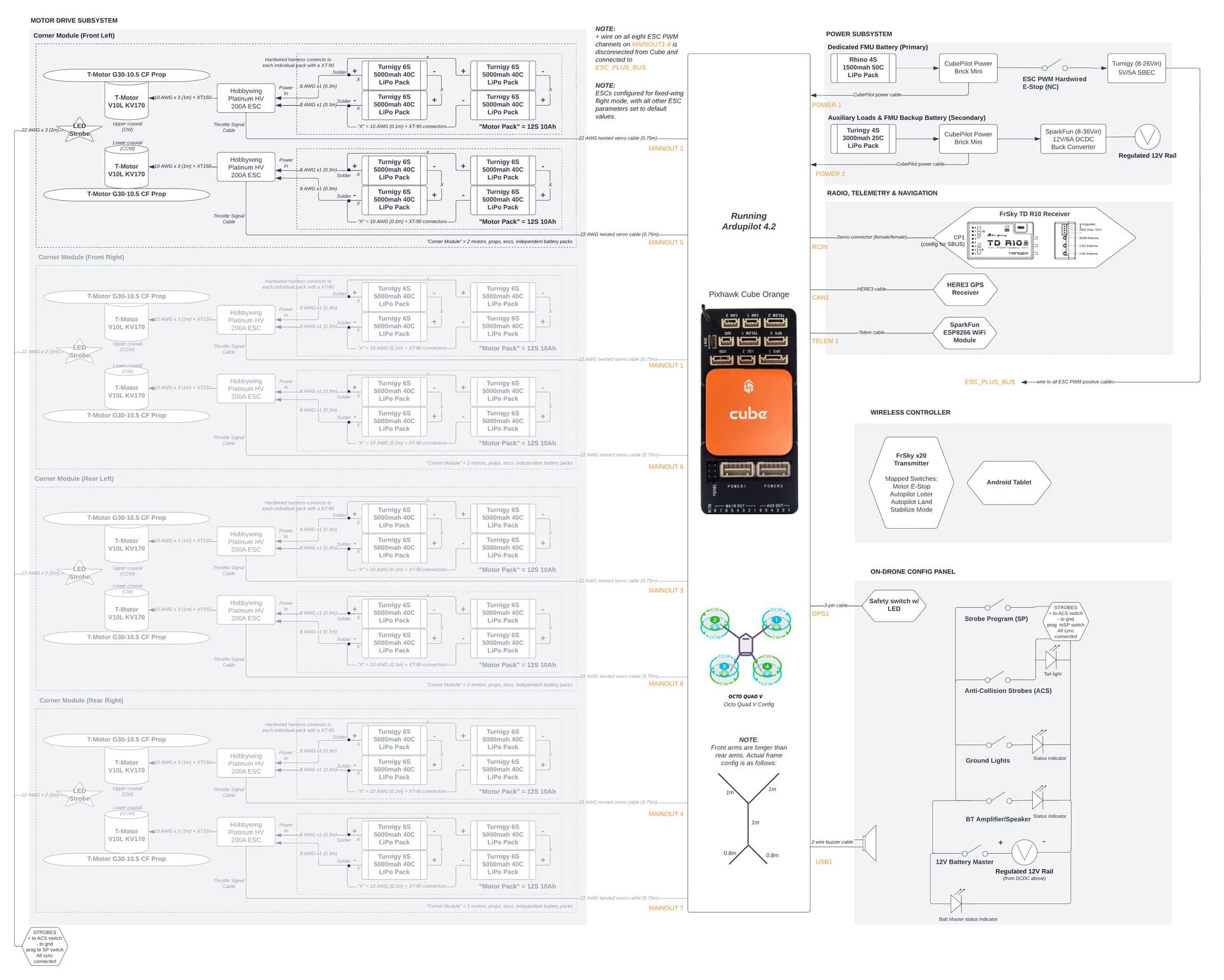
I have a large heavy lift drone (coaxial octo) with Ardupilot 4.2 running on a Pixhawk Cube Orange. There are 8x Hobbywing Platinum PRO 200A V 4.1 ESCs connected to the Cube. The ESCs are not receiving signal from the Cube. When I turn everything on the ESCs just beep as if there is no PWM input. When I directly connect the ESCs to my TD R10 receiver, they run correctly. Here are details on the setup and what I’ve tried based on other similar forum posts:
SETUP
Separate battery packs for each ESC and the Pixhawk, so all independent power sources
ESCs connected to each of the 8 Main Out pins on the Cube. Signal to signal, ground to ground, + to +
I believe the ESCs have a built-in BEC (haven’t checked the + rail voltage but I don’t think that matters since I’m not running any servos?).
Receiver is connected to the Cube and it’s receiving the command stick inputs (confirmed in QGroundControl)
ESC calibration procedure does not work
Motor test tab in QGroundControl does not have any effect on the ESCs (no response)
ALREADY TRIED
Followed the tips on this and this thread, although I don’t see the resolutions posted to either of those threads
I tried changing the parameter to 5V PWM output vs. 3.3V (tried both) [BRD_PWM_VOLT_SEL]
In QGC I can see PWM values are being output and dynamically changing as I provide transmitter control inputs. I have not confirmed this by probing the hardware, but can see it in QGC. I suppose if I can get access to a scope I could probe the PWM signal to check.
I disabled the safety switch check parameter, and I am able to arm the drone and go into flight mode
I also tried enabling the motor output using the safety switch, even though I think this isn’t necessary given the parameter disable
You have to make a separate power system for the escs. There is no power output on the positive pin from pixhawk servo rail. I had this same problem. I used a hobby wing voltage regulator and made 6 positively charged lines to splice into the servo wires. Problem solved. I always assumed the servo rail was putting out power on pixhawk, it does not.
Got it, so just to clarify the ESCs require +5V on the + servo line to operate? So in that case I could get a BEC and power the + rail of the Cube Orange, which would power all the ESCs?
Yea I just jimmied a positive 5v wire into each servo line from a little power supply I made that sits separately from everything else with a little on off switch to turn ESC on and off.
@massive505 good call-- that was the problem. I looped back 5V from the RCIN to the Main Out rails to test it and the ESCs run properly. I’ll probably end up connecting a BEC to the + Main Out rail just in case RCIN 5V doesn’t have the current for reliable operation of the 8 ESCs. Thanks for your help. This solved the problem!
I’m surprised…normally ESCs don’t need 5V power unless there is a true opto-isolator circuit (which the ones used by the OP don’t seem to have).
According to the ESC manual, the red and black wires in the throttle signal cable are power/ground for the BEC output. So if you have the BEC versions, you should remove the red wire from the three-pin connector so that they’re not all trying to feed voltage to the power rail at once.
No problem. I wish someone had helped me last year with this. No one knew that the servo rails do not put out power. Anyway good luck on the rest of your build
Always on all flight controllers that I know of the Servo + rail is NOT connected to a power source by default (although it may be measured and reported in logs).
The idea is you can apply whatever voltage your servos need (or ESCs in this case), maybe 5volts, maybe 6 volts, maybe more.
You have to use an external BEC to supply that voltage, NEVER use +5v from the flight controller.
I suggest you power up the ESCs with a battery and measure the voltage on that servo + wire while disconnected from the flight controller - find out for sure if the ESCs are putting out 5volts or not.
If they are putting out +5volts, they cant all be connected together.
If they aren’t, they may need to be supplied a regulated 5 volts to function. In this case they may be a true opto isolated ESC.
On the subject of battery packs, it’s generally considered that running a special pack for the flight controller is an “overhead” you can do without. That is: more connectors, more wires, another thing to fail…
Usually every gram counts, so better to run the flight controller (or it’s power brick) from the main battery pack.
Usually only VTOLs have two batteries, like a lion for forward flight (endurance, constant known drain) and a lipo for vertical just big enough for a couple of vertical landings and takeoffs.
@xfacta thanks for the helpful info. I just checked the ESC servo line with a multimeter while plugged into battery power and disconnected from the flight controller. There is no potential between the ground and + lines, so as commenters suspected above it does not have a built-in BEC. I checked my version of the HoobyWing 200a ESC and it has the opto option. Yes, I read the documentation that the flight controller doesn’t have rail power for Main Out, but my surprise was that the ESCs needed +5V on the rail to operate (in addition to the ESC main power). But now it makes sense since there’s an optoisolated circuit isolating the PWM signal and that requires a separate power source from the main ESC power.
So my solution will be an external regulator providing a shared 5V on the + rail of the flight controller Main Out, and all ESCs plugged directly into the flight controller.
I wouldn’t feed the rail and the escs from the rail. It is better to make jumper board where you feed the + from an external sources and gnd/signal connected to the rail. There will be power spikes that might effect badly the flight controller and youigjt have in flight reboots.
Okay, will do. I couldn’t find a pixhawk Cube Orange schematic, but was guessing that the 5v rail is floating and disconnected from the rest of the board.
Never say never. I sometimes power the rail from the same 5V source as the autopilot as a convenient way to power other low current devices. In that case, I DO NOT power any motorized devices from the rail.
Yes I understand, some of us may have been known to power a high power telemetry radio from the flight controllers telem port - also something we must never do
I now have a SBEC powering all ESC PWM + wires, separate from the Cube. All ESCs are functioning. However, if I go full throttle during a motor test (grounded, no props or other motor load, transmitter control to the Cube/Ardupilot) the ESCs will go into “over-current protection” and shut down. This only happens at very high motor velocities. Since there is no load other than inertial acceleration force, I suspect it’s more of an overspeed vs overcurrent. Any ideas on what to do? Should I limit the PWM max value in Ardupilot config via QGroundStation? If so, how would I determine a safe limit. If ESC overcurrent happens in the air the ESC shuts down and drone falls out of the sky.
Alternatively, there are a number of settings within the ESC that can be programmed using an external programmer. The default setting was helicopter mode with ESC governor. That was delivering unintended behavior, and slow throttle response, but never had an overcurrent. Since rapid motor acceleration is important for a drone, I switched the ESCs to fixed wing mode, which has the best response time but no speed governor. Here is the manual for the ESCs.
Not sure if anyone has experience running high current ESCs and motors, but any advice would be super helpful. Thanks!
Bonjour,
je suis vraiment heureux d’être tomber sur ce sujet…voila bientôt 1 mois que je n’arrive pas à calibrer mes esc opto 300 amp 16s… j’ai un contrôleur pixhawk cube orange et un récepteur ia6b pourriez vous m’expliquer comment je dois faire pour alimenter mes esc en 5 volts ? Je ne suis pas un pro en programmation et je galère vraiment…pourriez vous me montrer avec un dessin comment raccorder les ESC au contrôleur?
Monsieur avec tous le respect que je vous dois je ne vous demande pas votre bénédiction… je ne vois pas pourquoi je devrais me justifier dans un premier temps ce drone sera piloter avec une RC et pas habité