Hey out there.
Merry Christmas to you all.
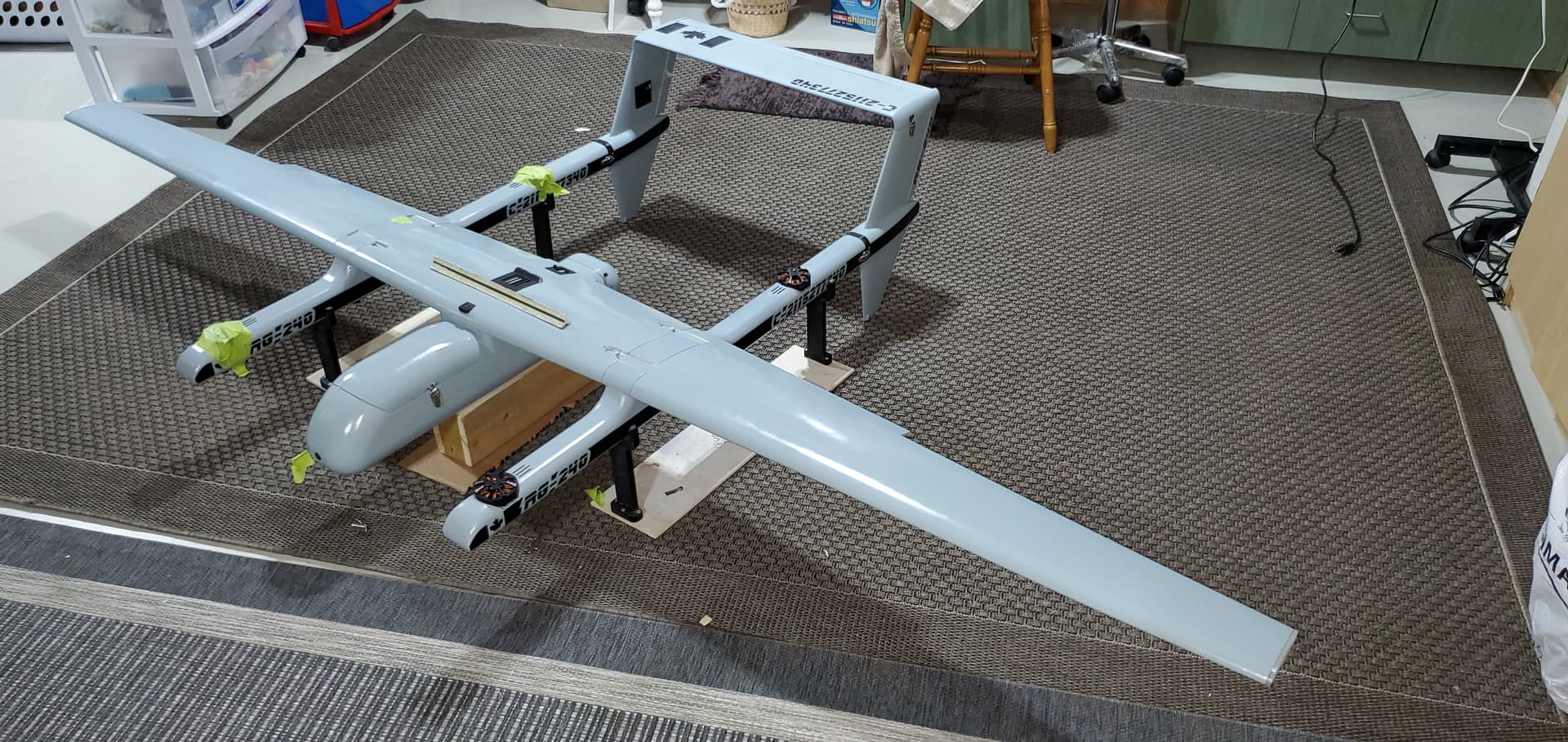
Had a question about ESC telemetry on a quadplane.
So firstly does arduplane use ESC telemetry. I have not read anywhere that it does or doesn’t.
If it does, I assume if the pusher motor is also using a blheli esc that you would capture amp usage for the pusher motor.
Rolf thank you.
One last question. Should I use a current sensor for the machine or is the ESC telemetry sufficient.
IT certainly makes the wiring easier.
I still usually use a current sensor, just to always know the total current that is draining the battery. Exception: If only one motor is connected to the battery, as in VTOLs powered by 2 different batteries, one for lift and one for propulsion.
Thanks Rolf.
Right now my design has a single battery, not sure I have the space for two. At least 2 16000mah batteries. Also the additional weight I think would be too much. I was curious about the sensor because the current demands through a pdb could potentially be very high and designing the pdb with out the sensor is far easier.
Thats what I am using. The 200 Amp version.
Just cumbersome to use. IT comes with 10awg cable but the reality is that 10awg doesn’t support that level of current. So its got me wondering.
You can use the esc telemetry for current sensing, and aggregate it as well for total consumption if wanted (batt_monitor type = SUM). Doing it that way can be misleading if your avionics draw significant current though: using a smaller current sensor on your avionics in the sum list would sidestep that.
Thanks James.
The issue I have is trying to tie the mauch sensor into all the connections that are needed for the craft. at nearly (4x30 amps for lift motors + 1x65 amps) is a lot of demand and the small 10awg that comes with the Mauch sensor just isn’t enough in my opinion. Ever using the chassis wiring rating 10awg is only good for 55 amps. So trying to up the wire thickness goign into the sensor is the first problem. If I avoided the sensor all together then it’s easy to up the wire thickness going to all the connectors to the various motors.
My idea to the ultimate solution would be to incorporate a current and voltage sense system directly into my pdb so I can avoid the use of wires all together. I could easily go to a 6oz copper board and by pass the need for wire all together.
Unfortunately I have been unable to find the circuit diagram for the sensing system.
I will keep working the problem.
Thanks for the tip. I was not really aware that even solid AWG 10 is only rated for 45 amps continuous current. How even AWG 8 should then continuously withstand 200 amps, Christian Mauch should explain.
In applications like this a rating table like that isn’t really the limit you should restrict yourself to. For several reasons
The silicon jacketed wire we use on drones is rated to a considerably higher temperature (this is the primary limitation to determine current limits in your typical application).
1.1 In addition, RC aircraft are typically not operating without someone actively observing them and it’s typically in a situation where it is very unlikely to burn a building down if a wire gets too hot.
The wire runs are typically much shorter thus also reducing the consequence of higher resistance wire.
Typical wire current ratings assume continuous duty, and not as in your hover current is 30 amps continuous duty, but it’s going to pull X number of amps for the next 3 years type of continuous duty.
To kind of summarize all this points, these sorts of tables are made very conservatively and for good reason. There is no need to push the limits of how much current a given wire can truly carry in most ground based situations, so it’s generally played on the safe side to account for all kinds of issues that may crop up years down the line and cause a safety risk.
There is a version of the Mauch sensor with an 8 gauge wire, if you are brave and have a very very good soldering iron you could swap it out yourself.
But chances are the connectors you’re using are going to be just as much of a bottleneck as your wire. There are plenty of batteries that can discharge 300 or even 500 amps that ship with 10 gauge wire leads on them.
Not to say I don’t see plenty of drones that have concerningly light duty wiring but the important thing to keep in mind is isn’t a single static number to consider. How long is just as important as how much.
Hey Mark
I agree with all your points. For me I am taking the information in the charts as guidance. Not as a hard fact, so looking to make sure connectors are up to the task, that wiring supports the current demands and so on. Looking to reduce the possibility of failure while balancing that against what can reasonably be done.
Thank you for all this and your other post. Very informative.
@Rolf
I am back on the subject of Arduplane and ESC telemetry.
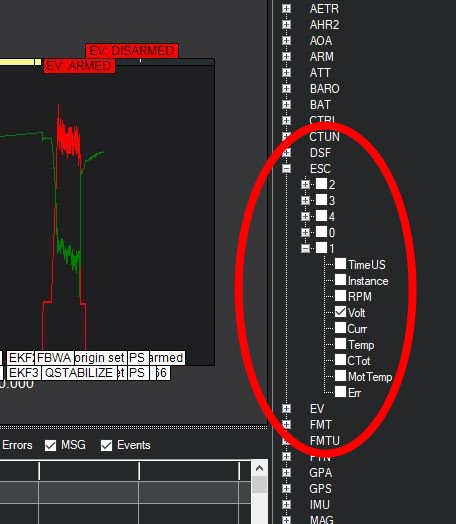
I have 5 blheli ESC on my quadplane but only telemetry for the quad motors.
IS there something special you need to do to get that fifth motor. I keep wondering if there is a config issue on my machine. The esc seems to work. The motor spins in FBWA mode…mind yo I can’t see it in the motor test interface…which to me is odd.
But anyway. Just wondering if you had any thoughts.
If you have SERVO_BLH_AUTO enabled and SERVO_BLH_MASK is still 0, you must also mask the output for the propulsion motor in SERVO_BLH_MASK (SERVO_BLH_AUTO identifies only multicopter motors)