Good day all, I am unable to calibrate my ESCs through trasmitter as stated in the ardupilot esc calibration page. When I turn on the transmitter lowering the throttle and plug the battery, a beep beep beep sound is emitted constantly without any stop, it only stops when I unplug the battery(It continues when I turn off the transmitter).
Anyone got some ideas?
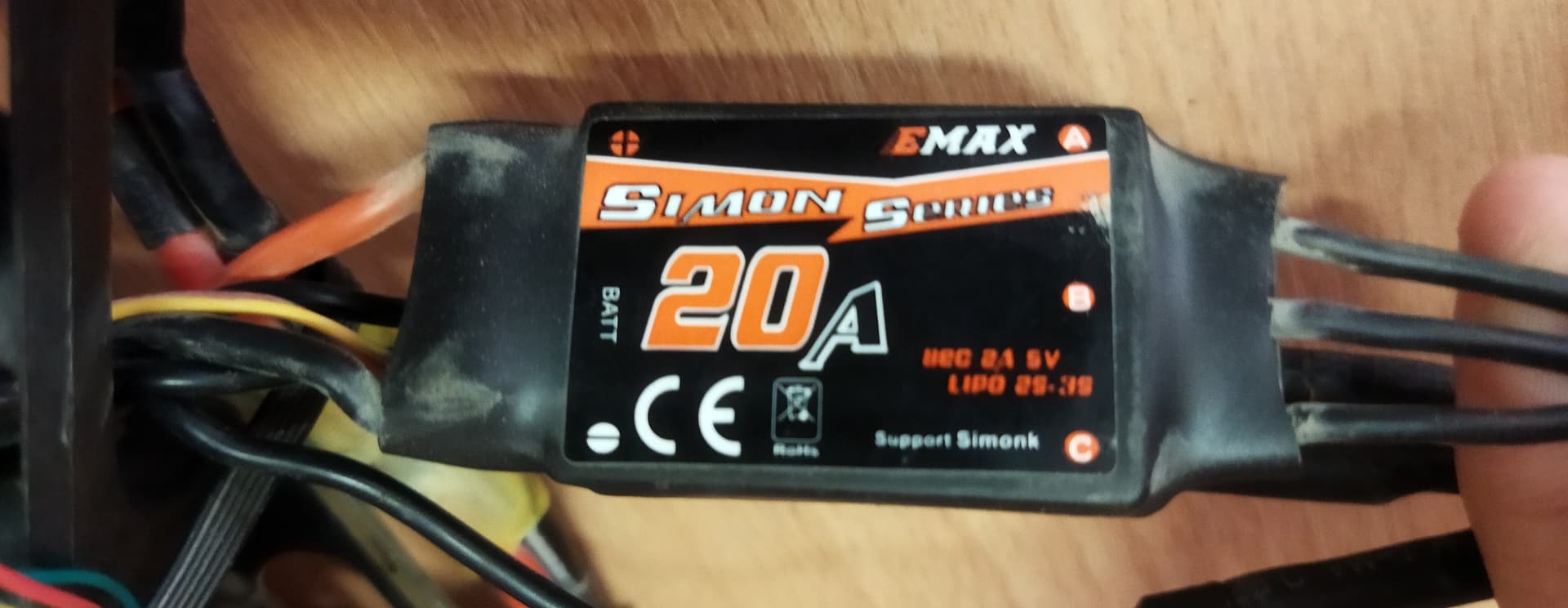
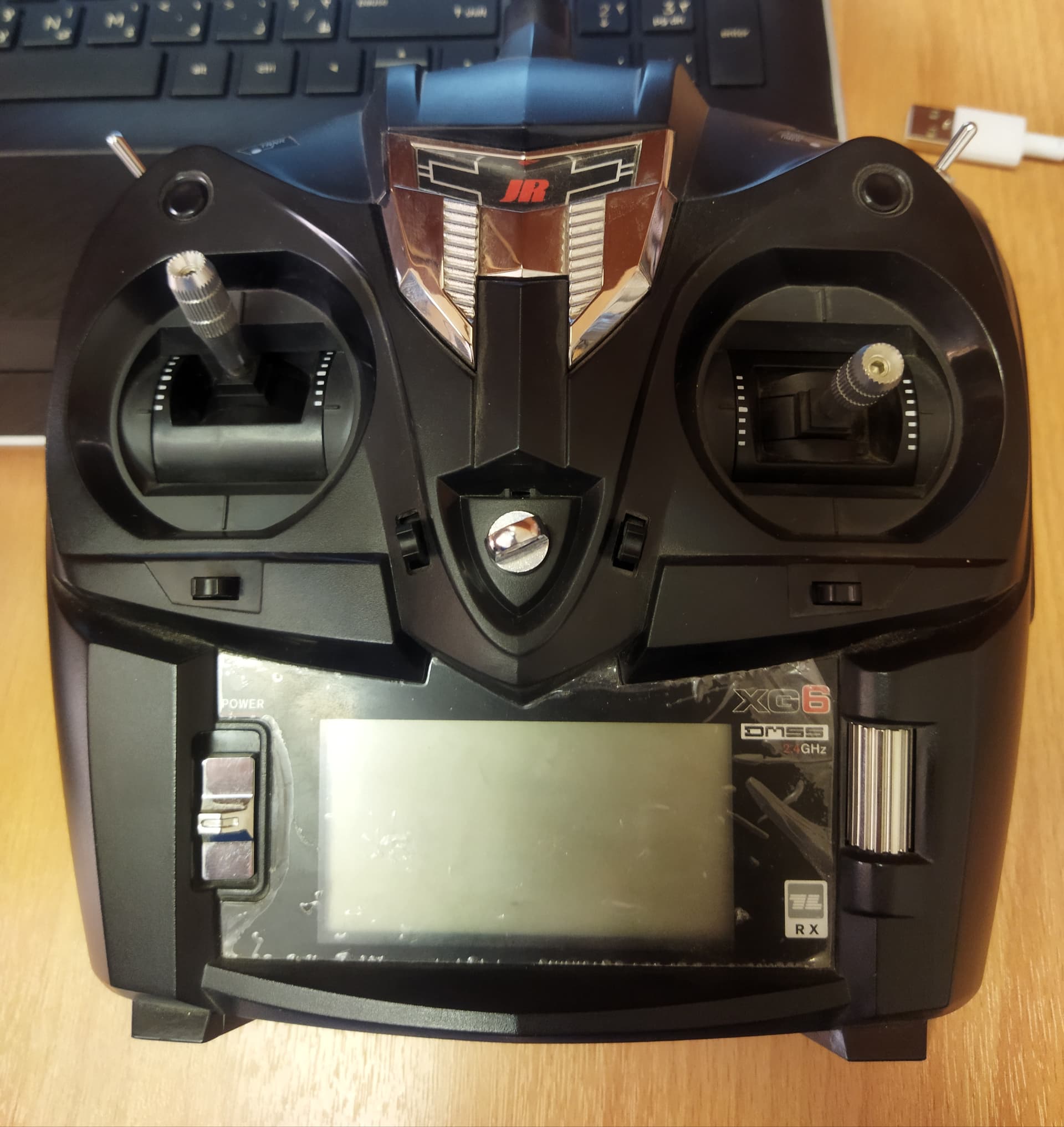
The RC, ESC and motor used are in the pics attached.
Connect the ESC’s one by one to the receiver and follow instructions that came with your ESC’s.
In that way nothing can go wrong with the process involving MP
I would connect it straight to your receiver as it may be that your throttle channel is set to reverse. This wouldn’t work.
So, after connection one ESC to receiver follow this:
C2.Throttle range setting procedures (when users change a transmitter, throttle range setting is recommended.) Switch on the transmitter, move throttle stick to the top position→ Connect battery pack to ESC→ Two “beep” sounds should be emitted, means the top point of throttle range has been confirmed and saved→ Move throttle stick to the bottom position (within 2s), a long “beep” sound should be emitted , means the bottom point of throttle range has been detected→ Several “beep” tones should be emitted to present the amount of battery cells→ When self-test is finished, a “♪ 1 2 3” tune should be emitted, Move throttle stick upwards to go flying.
*If the throttle stick is neither at the bottom position nor the top position after powered on, it will constantly make “beep” sounds.
If you don’t get the two beeps then repeat this process but this time with throttle stick down when connecting to power. - If that works then your throttle channel is in reverse and you will have to fix that first.
Just noticed the protective plastic on your RC.
If this is a brand new RC you’ll need to pair transmitter & receiver first before they “talk” to each other.
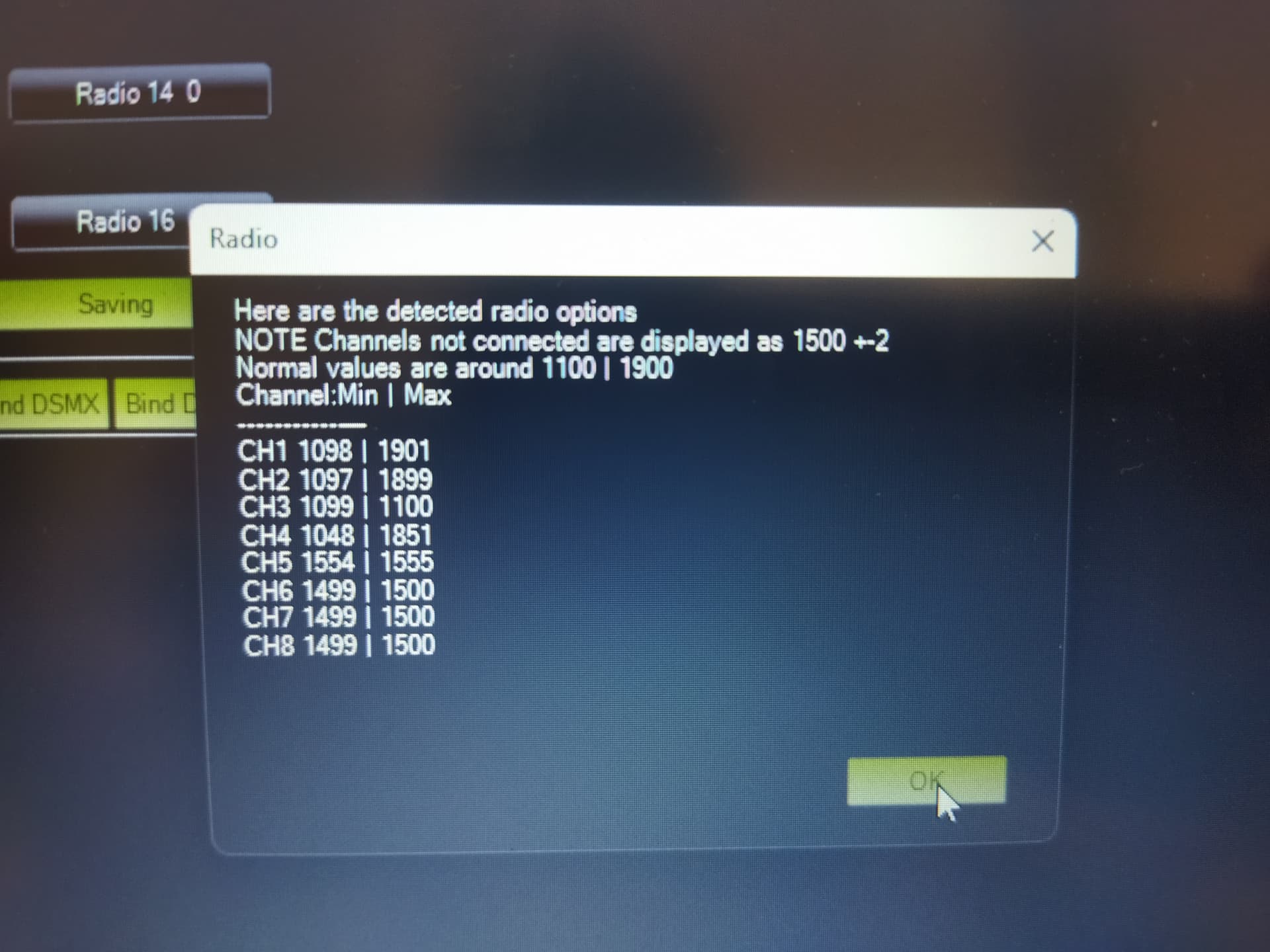
…but looking at calibration screen basic pairing may have happened but none of the other channels have been configured in MP (like your switches on the control)
…Anyway, that’s a separate matter.
Have you got a servo available?
We need to confirm that pairing of receiver to transmitter is OK. This can be done by connecting ESC to receiver, applying power and then also connecting servo to receiver and moving controls on transmitter. (Also light on receiver should be on steady if paring was successful)
Other possibility is that you may have ESC control wire the wrong way around. No control signal can be sent to ESC if incorrectly connected.
@Karl_Schoelpple Thanks for your attention and help. The main problem was from the throttle channel settings from the RC transmitter. They were: ( High 70% and Low 30%) and that was causing the beeping and the not being able to calibrate the ESCs. I adjusted them to 130% each and everything worked fine. (Now the high pwm is approx. 2000 and the low one is 1000). It is a rule: whenever the ESCs are beeping very fast, approx. 4 beeps / sec (beep beep beep beep …), this means that the problem is from the radio. If beeping 2 beeps/sec (beep beep , stop , beep beep , stop , …) This means that the battery is either overcharged or has no enough charge.
I’m please to hear matter has been resolved.
But this highlights why wee need to have as much detailed information as possible in order to help.
You just mentioned it keeps on beeping whilst it would appear there was a system to that beeping. - This is exactly the kind of detail we need to know in order to provide useful help.
All best and a smooth setting up of everything else.
Hi Akhila, you should refer to the transmitter catalogue or instruction for use to see how to do that. Check it and you’ll be able to change the throttle.
It is wrong to calibrate the ESC with just the receiver, because it is not the receiver supplying the PWM to the ESCs when the copter is in flight - it is the flight controller supplying the PWM in its own range of 1000 to 2000.
Admittedly calibrating the ESCs with the receiver can get you out of trouble of they are very wrong, but it is less than ideal and technically incorrect.