hello, I have a problem when using the esc 4 in 4 (hobbywings Xrotor 60A), where when I try to fly my drone, the drone crashes and flips over. even though I’ve used the AUX OUT pin for the motor.
Check motor order. Incorrect motor order causes the drone to flip over.
I have checked the order of the motors, namely the order of the motors A, B, C, D and 1,2,3,4
- Is the FRAME_CLASS parameter set correctly?
- Is the FRAME_TYPE parameter set correctly?
- Does button A make motor A spin in the correct direction?
- Does button B make motor B spin in the correct direction?
- Does button C make motor C spin in the correct direction?
- Does button D make motor D spin in the correct direction?
1 Like
In addition to what others have mentioned, what direction are the motors spinning? Is your frame configuration in Arducopter X or H? X and H have opposite motor spin directions, with X being ‘props in’ like most quadcopters and H being ‘props out’.
yes everything is correct for FRAME_TYPE = x, and for the order of the motors it is also correct starting from A, namely front right, rear right B, rear left C and left right D.
is it because the setup in Belhelli32 is wrong?
No BLHelli has noting to do with it.
for the direction of rotation of the motor it goes towards the drone, because I use type X
Check propeller and motor direction
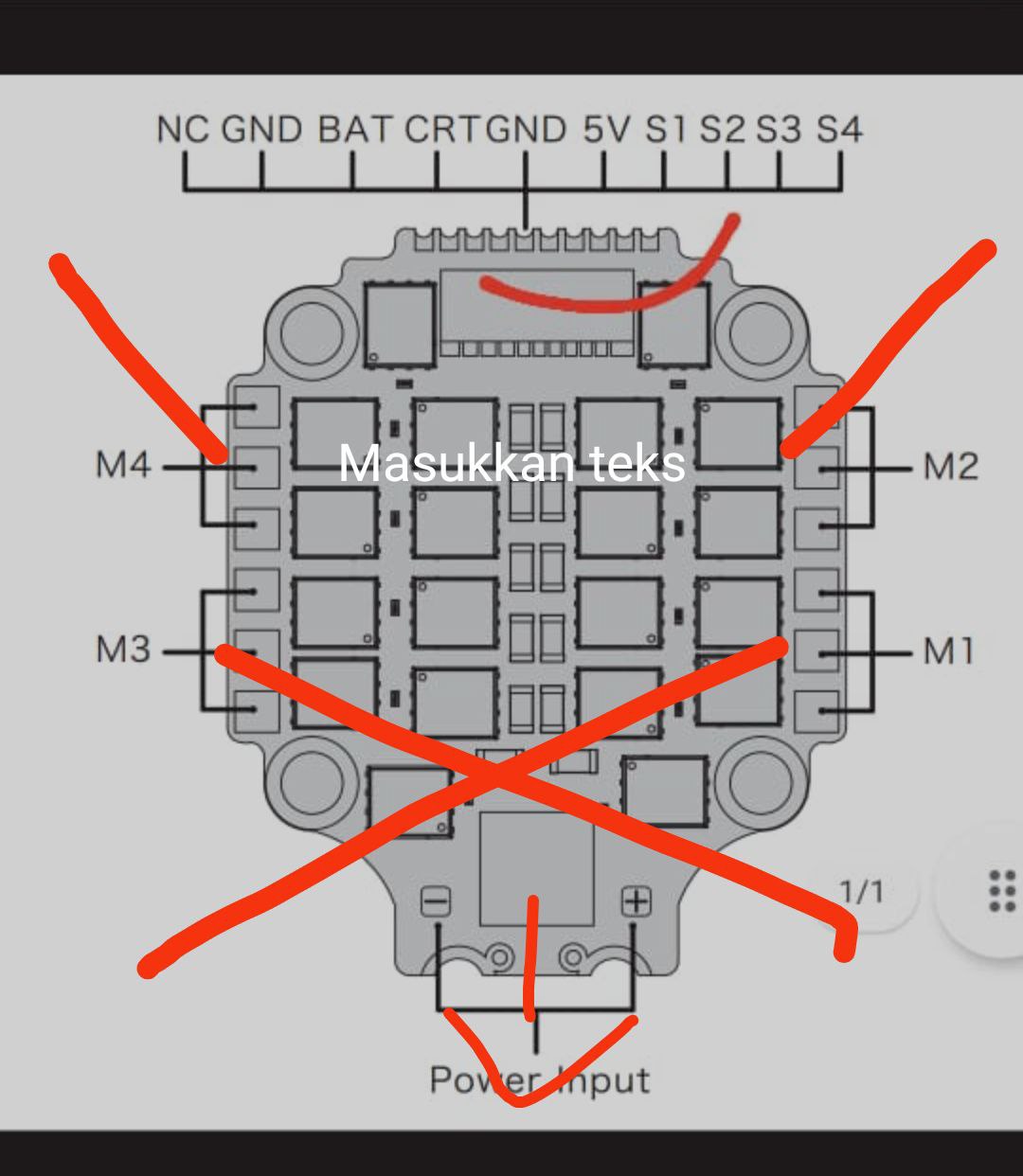
I think that’s the esc wiring to the motor, is there an error?
There can’t be an error if it’s correct in Motor Test. Post a link to the .bin flight log where it flipped over.
Regarding a problem with BLHeli_32 there actually can be a problem if Low RPM Power Protect is enabled and they are relatively low kV motors. But this usually results in no take-off at all.
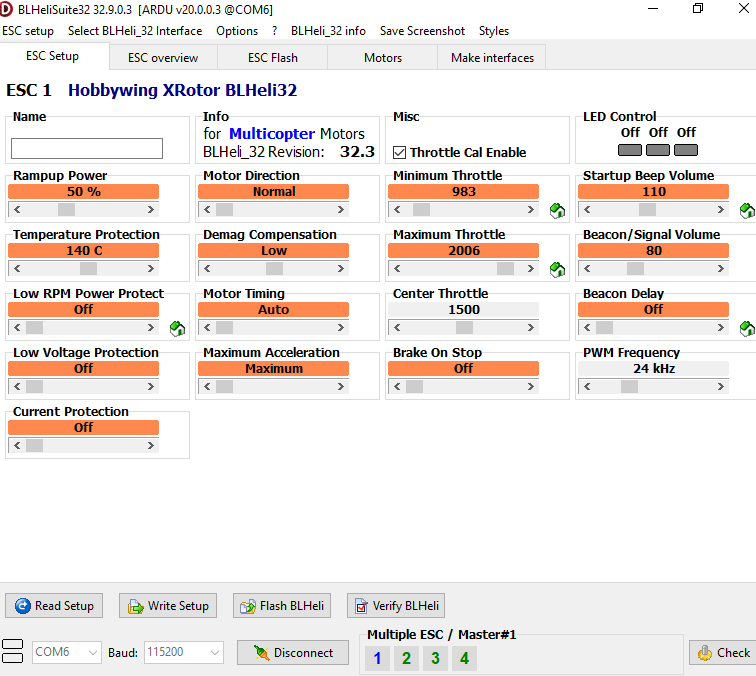
this is the setup of my Belheli_32 for the ESC 4 in 1 Hobbywing (60A) and I am using the parameters
SERVO_BLH_AUTO = 1
SERVO_BLH_DEBUG = 1
SERVO_BLH_OTYPE = 7 (Dshot 1200)
MOT_PWM_TYPE = 7 (Dshot 1200)
MOT_PWM_MIN = 1000
MOT_PWM_MAX = 2000
and for the problem of the order of motors A, B, C, D or 1,2,3,4 as well as cw and ccw, I think everything is correct, I’ve already tested again
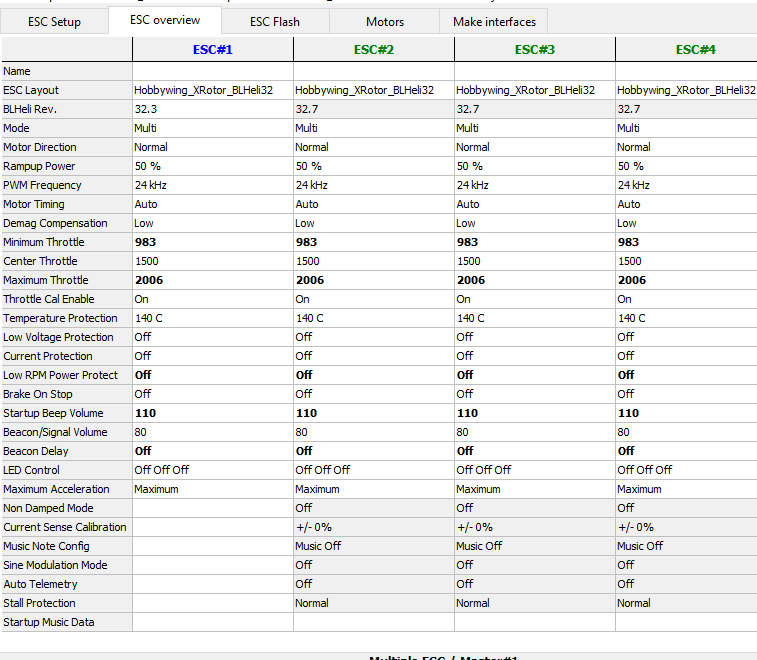
here is the setpu from Belheli_32
Disable DEBUG
Disable OTYPE
Set MOT_PWM_TYPE to Dshot 600
For further help post a link to the .bin flight log.
why use dShot 600?. datasheet collection from that ESC using Dshoot 1200
It doesn’t matter what the ESC data sheet says it’s what will run with the Flight Controller and Arducopter.
still can’t fly, the drone is still upside down (error)
It may be that your order is wrong, Try setting FRAME_TYPE to 12 (BetaFlightX)
This is the more traditional layout of motor order.
You can use whatever Quad FRAME_TYPE you want. If the order and direction are correct when running Mission Planners Motor Test it’s good. If it’s not change the order either with a connection change or a Servo Function order change.
But, you are right that these Xrotor 4-in-1’s do follow the Betaflight motor order if it’s typically mounted with the battery pads facing the back.
ok thank you all, it helped