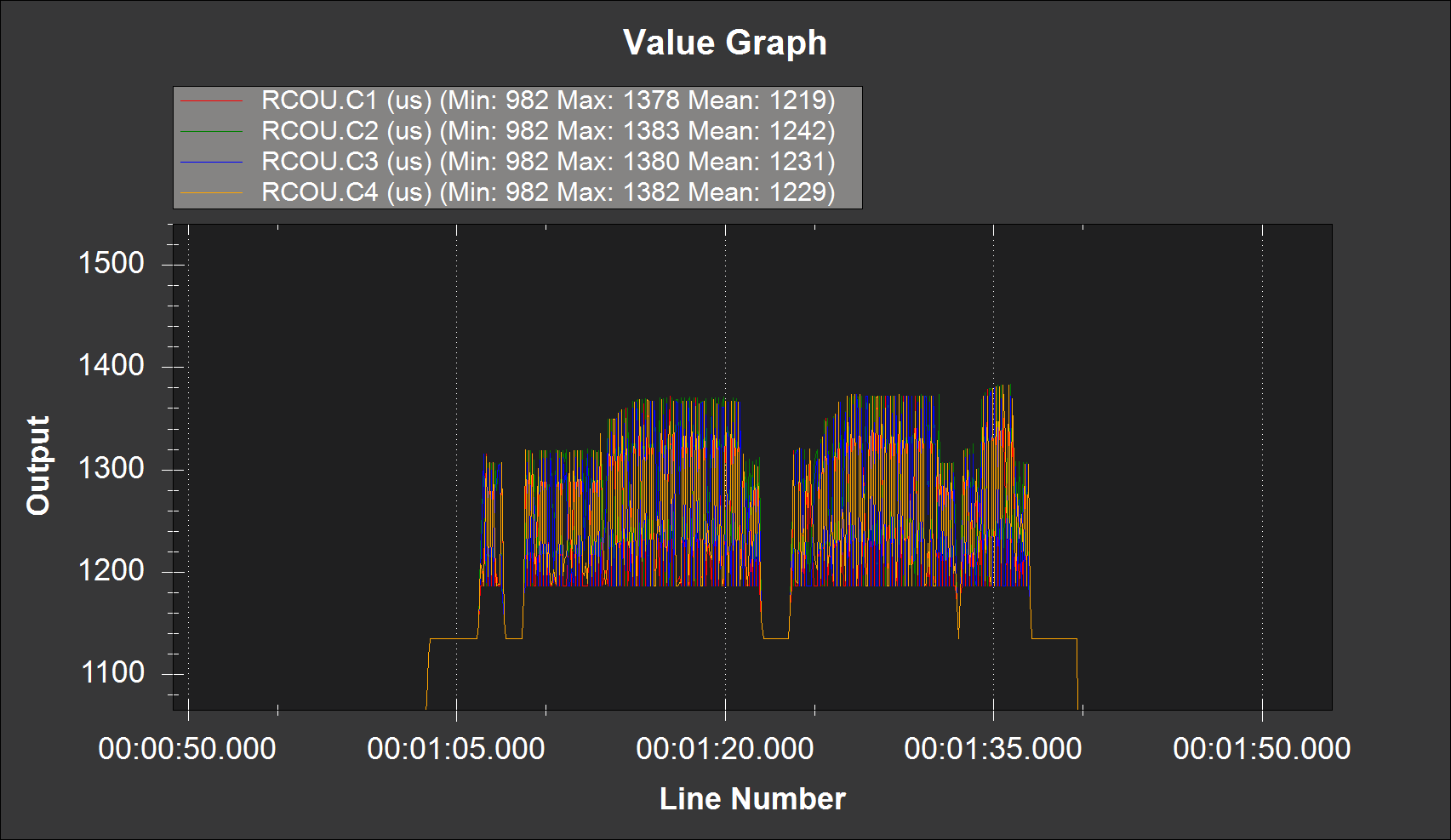
I am building a new drone and I had a crash in the first flight (Crash! Drone went up without control, passthrough FrSky telemetry bug?). But after the reconstruction of the quadcopter and the upgrade to Copter 4.0.3 I have made some tests.With the drone tied to the ground I did a Motor/Compass calibration and later I restarted the Pixhawk and armed in Stabilize, but I saw that the motors had vibrations. When I watched the logs I found that the PWM of the motors were erratic:
The frame is ok, I don’t think vibrations would be the problem, just armed the drone and the pwm is erratic. In the logs I don’t see a problem with vibrations.
Set these:
BATT_ARM_VOLT,22.10
BATT_CRT_VOLT,21.00
BATT_LOW_VOLT,21.60
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2
MOT_BAT_VOLT_MAX,25.20
MOT_BAT_VOLT_MIN,19.80
Then maybe if you can loosely tie down the frame, or maybe even get some brave soul to hold it overhead if safe to do so, arm in Stabilize, use just a small amount of throttle and see if small inputs of pitch and roll controls have the desired effect, also test yaw but it’s a little harder to tell.
If that goes well you’re just going to have to try and make it lift off unrestrained in Stabilize mode. You want to make it launch a meter or so high, dont let it stay in contact with the ground.
Maybe post a photo of the frame.
Hi guys!
Just to update this post, I finally found the error, the vibrations were the real problem. The use of a 3D Printed Anti-Vibration Platform like this https://ardupilot.org/copter/docs/common-vibration-damping.html amplified the vibrations of the motors when they just started to spin.