I loaded a nightly build ardupilot version. Yesterday flying seems fine. Today gotten this, Elrs on Non DMA serial warning and suddenly the control gone retarded. It barely response to my controller.
Is this normal or issue with my elrs RX?
I loaded a nightly build ardupilot version. Yesterday flying seems fine. Today gotten this, Elrs on Non DMA serial warning and suddenly the control gone retarded. It barely response to my controller.
Is this normal or issue with my elrs RX?
It happen surprisingly only in my second and third flight
It seems that the RCin, Des roll and actual roll completely mismatch. I was actually doing autotuning. Could it be my autotune completely mess up the pid???
For the time period shown, Desired and Actual roll look great. There’s a pretty big phase lag between RC input and Copter response.
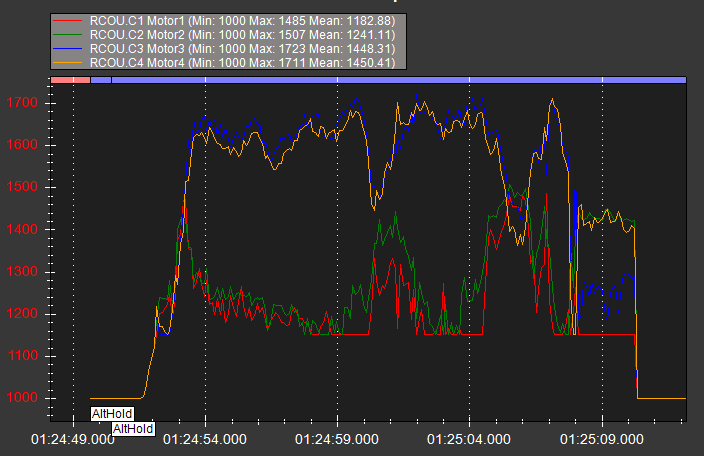
It looks like you have a massive bias in the motors that may be caused by a physical problem (props not aligned from one motor to the next).
You have no harmonic notch filtering enabled. The voltage monitor shows 0, and the current monitor output looks extremely low, so is likely misconfigured. You have no ESC telemetry - recommend using it if possible. You have a lot of compass errors, indicating the compass calibration is inadequate.
You might consider moving ELRS to any UART other than 3 or 6, as DMA might be helpful on an F405, though it probably isn’t causal here.
Follow the tuning steps and make use of the Methodic Configurator software.
Use stable firmware. There’s no reason to use a dev version unless you’re trying to use brand new features (and it appears that you are not).
Agree. Thanks for the analysis. I actually redone my compass calibration before this flight because before this it also had this right in the middle of my autotune on roll.
The motor bias if any shouldn’t cause a delay in my controller response right? Since you said it looks like hardware issue, could be a faulty esc…?![]()
![]()
![]()
Yesterday was thinking along the line of my imu that cause the compass error.
Motor bias wouldn’t directly cause a delay in RC input or processing of pilot command, but it could absolutely contribute to the type of issues you’re seeing. Look at the lower output motors and how they saturate at MOT_SPIN_MIN.
It’s just a poorly tuned copter at this point that needs some mechanical attention before following further tuning steps.
Yes… Might be I mess up the values tuning a few times after modifications. I try resetting it and tune again. Thanks for the analysis.
Fix the motor mounts, first. It’s entirely possible this thing is on the ragged edge of crashing.