I found something similar to my symptom cases in the forum
Ref1)Servo Movement With No Power Applied! [SOLVED]
Chad_Frazer
New Cube Orange Plus autopilot and sensors. Was using 4.3.7 for described flight, I have not loaded 4.4.0, VTOL airframe, well tuned, tested stall speeds and has had 4 flights.
What’s happening: I power up the bird and let the autopilot fully boot. I can then pick it up and when I move it through level to nose down the elevator servo moves. It’s not full smooth motion, it’s jerking to one position to another to full deflection. There does not seem to be a pattern to where it winds up. I can also move the elevator by hand and I can FEEL the servo (which has no power applied) resisting my motion.
SOLVED: This particular airframe has had a weakness in its design. On the right hand side, inside the carbon fiber tube, there is a male/female barrel type connector that connects the elevator servo to the fuselage. I know the design has been improved but apparently it still has problems. If the tail section is not precisely joined and screwed in just right a very small gap is made. When the bird spools up (all four motors) the amount of vibration increases significantly. The making and breaking of connection that this vibration induces causes the signal wire to receive a voltage which is then interpreted by the servo as a move command. The fix is to test the connection by trying to induce (by hand) servo movement.
This one was tough to figure out.
Ref2)Elevator Servo Drift
Elevator Servo Drift
cabaube Calvin
I am having trouble with my first VTOL build. It is a Quadplane with two elevator servos using a Cube Orange. All of my control surfaces work as expected, except for the two elevator servos. With the battery plugged in, I can visually see the servos slowly drifting towards their maximum PWM output. I can also see this in the Servo Outputs tab, where they increase values about one or two per second. This is my first fixed wing build with Arduplane so any and all help would be appreciated. Thank you!
==============================================================
I noticed the Ref 1) video. It was VT-Bird
I using same type one.
It seems that XUWING VTBIRD 4+1 has been discontinued and is no longer for sale.
Now it change to Albabird-XL VTOL.
I tested it by taking another servo out.
There was no problem when I used 4.17 firmware,well tuned and has had 2 flights.
I have loaded firmware 4.3x above version include 4.4.0
Even if 4.5 beta firmware
My FC is CUAV x7+ and XUWING VTBIRD 4+1 airframe.
Interestingly,Qstabilize mode ,In elevator servo.
With the battery plugged in or outside 5v insert direct to FC,
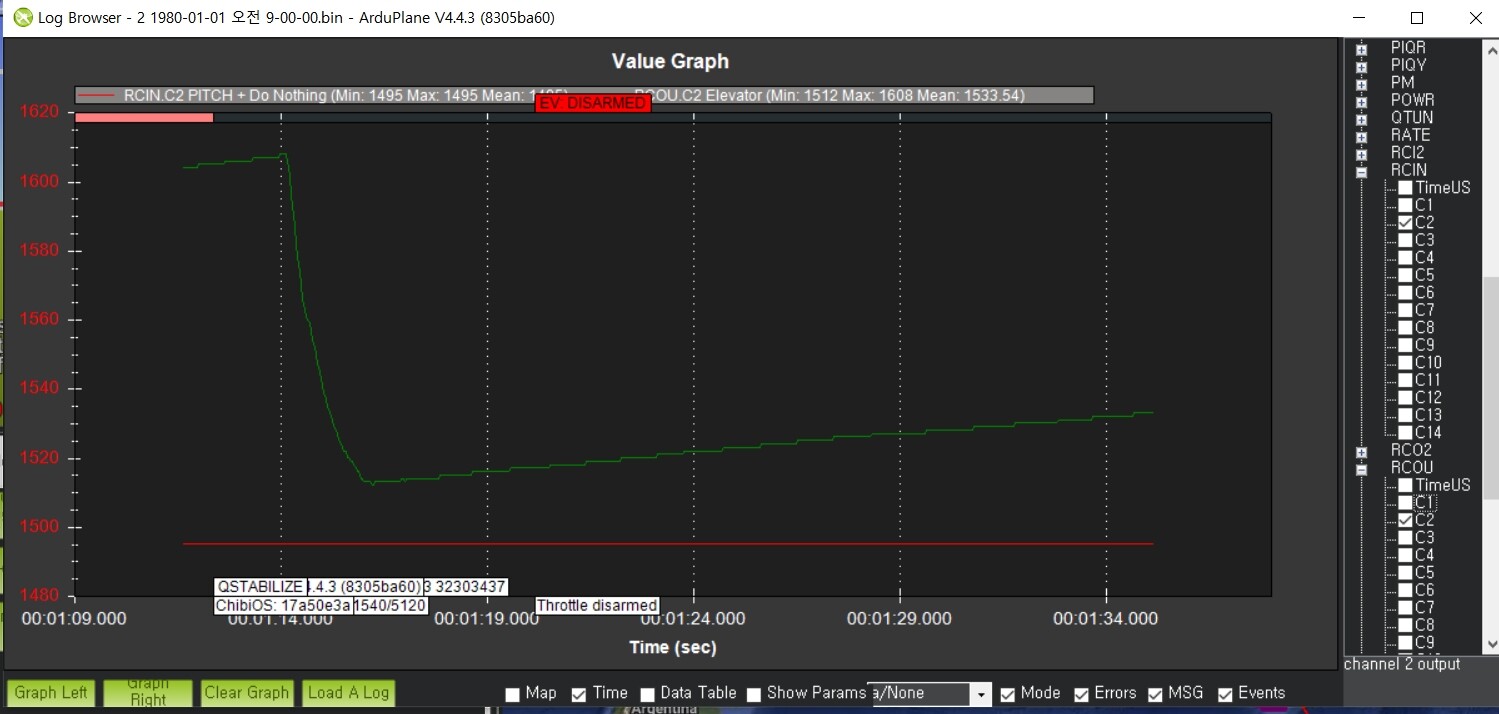
I can visually see the servo slowly drifting towards their maximum PWM output.
I can also see this in the Servo Outputs tab,status window ch2out where they increase values about one or two per second.
The same symptom always appeared above 4.3x version in Qstabilize mode but not mannual mode
It was fixed when I used 4.17 firmware
Many thanks for your answers.