Blue_fire
(Mithun)
1
Help !!
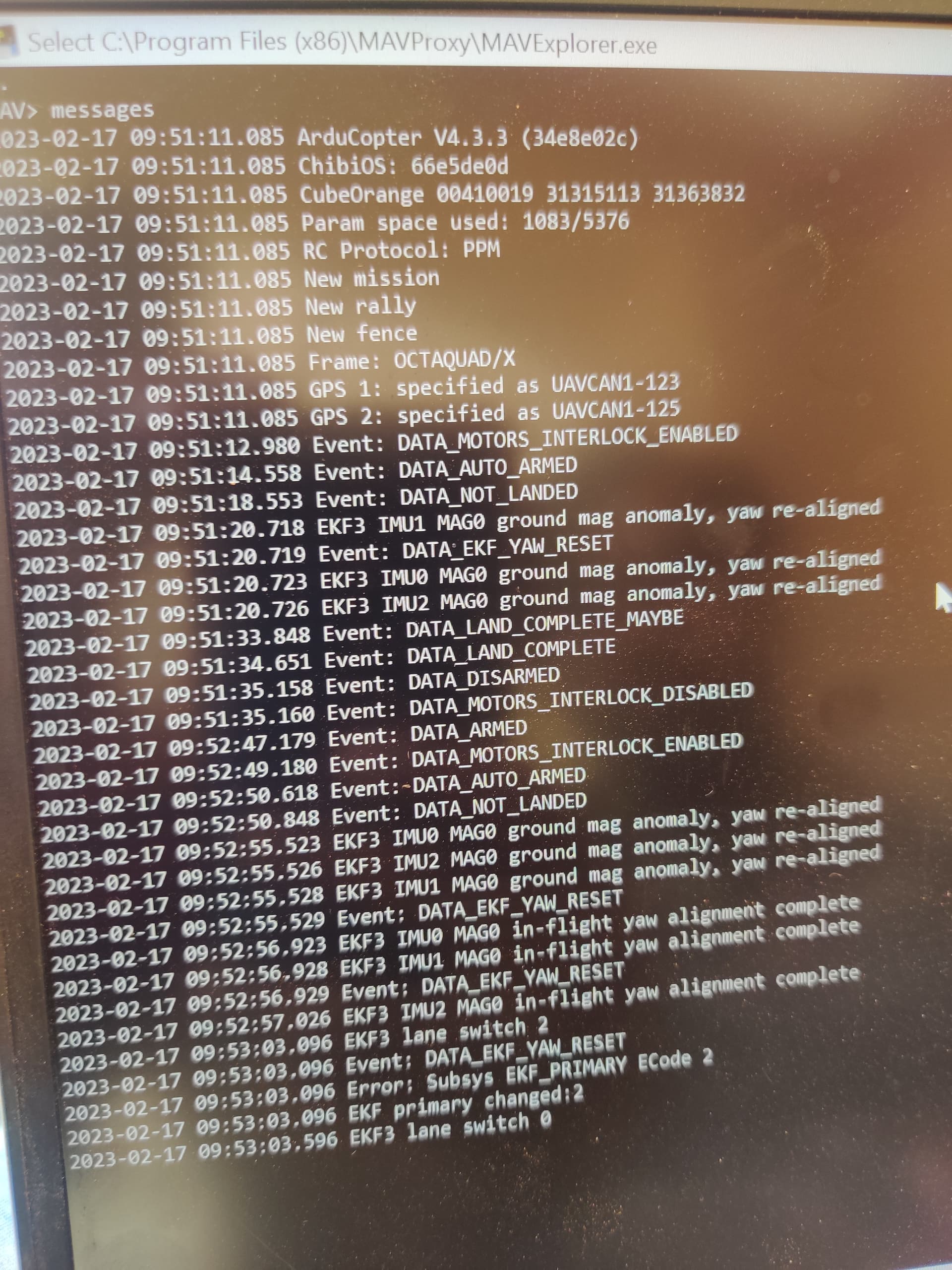
Just saved from a crash !!
EKF3 IMU0 MAG0 ground mag anomaly, YAW -Realigned
EKF3 IMU1 MAG0 ground mag anomaly, YAW -Realigned
EKF3 IMU2 MAG0 ground mag anomaly, YAW -Realigned
Log file :
https://drive.google.com/drive/folders/1XituHLgmXMXvgQ9hqKVUtU8Wzl3uTLwA
PS: CUBE ORANGE FLIGHT CONTROLLER WITH KORE CARRIER BOARD…
RT22
(Drew)
2
Did you sort this out by chance? How many GPS units are you running?
I had installed two compasses (here3)
The problem is one of the compass mag field was getting high because the battery was creating interference to it.
I then changed my battery position
Problem solved
Please do check your mag field of the compasses.
And do not use internal compass
talos
(wenlong)
4
I also find this problem, but my battery was a little big, I can not change its postion, could you give me some suggestion, thanks
Allister
(Allister Schreiber)
5
If you have setup current monitoring you could run Magfit and get the COMPASS_MOT. This may help manage interference as the current flow is increased.
https://ardupilot.org/copter/docs/common-magfit.html
Hey there. Been working on a quad copter, with which I took some successful flights, but started facing problems lately. The drone realigns yaw very frequently which makes it very difficult to control. Also, vertical drift is around 1.4 and horizontal drift is 1.1. Below I’m attaching the logs. Log 1 is of the last flight i took and Log 2 is of one of the successful flights. Any help would be much appreciated.
Log 1 https://drive.google.com/file/d/1cpsTsCIogCa_68WD9NyqZ40NeBPhAQdA/view?usp=drive_link
Log 2
https://drive.google.com/file/d/1cpsTsCIogCa_68WD9NyqZ40NeBPhAQdA/view?usp=drive_link
dkemxr
(Dave)
7
Remove the access requirement in that link and see the post above yours.
can you send photo of gps position ?
Blue_fire
(Mithun)
9
There is no specific GPS mounting position.
Make sure the GPS and compass(Here3) is away from battery
RT22
(Drew)
10
Cover your battery with a material that absorbs interference like PA6 or some EMF tape.
talos
(wenlong)
11
thanks, I use a compass far away from the battery, it does work