Hello! To begin with, I will tell you a little about my aircraft.
My frame size is 800x800x500mm.
I use Cube Orange, Here3 GNSS, Hobbywing XRotor Pro X6 motors and 2 LiPO 22000mah batteries.
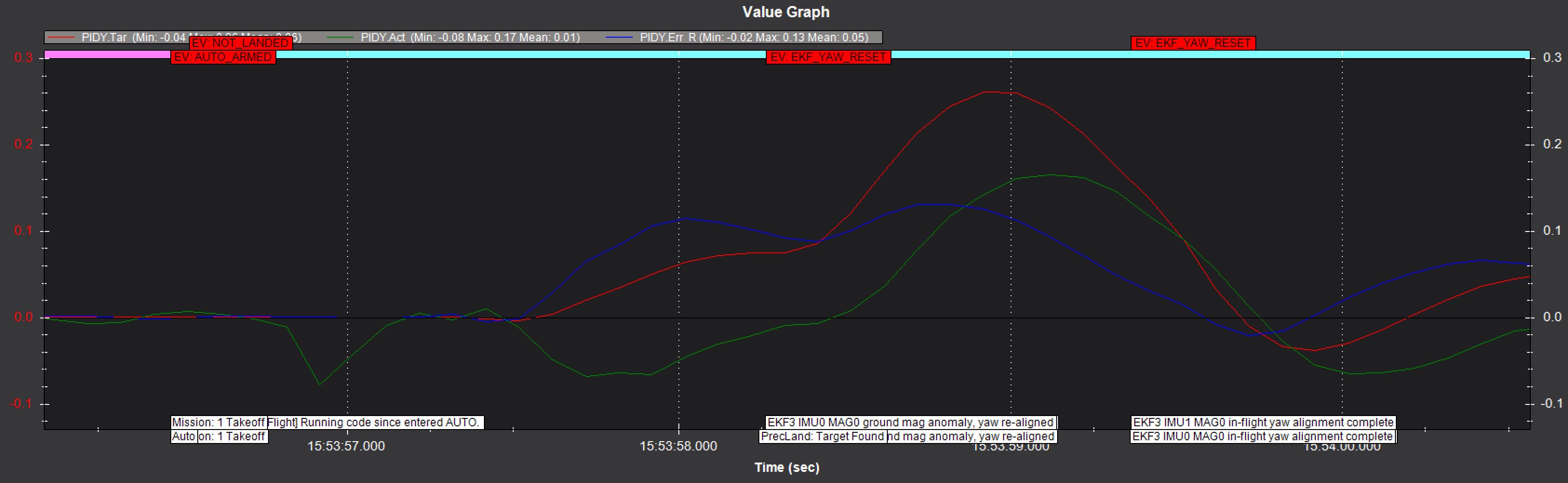
I’ve been flying steadily for a few months, but recently I’ve been getting the “EKF3 IMU0 MAG0 ground mag anomaly, yaw re-aligned” error when climbing. When this error occurs, my drone behaves very unstable. After I climb to a height of 10-15 meters, the compass is recalibrated and the drone behaves stably. I tried to solve this problem by replacing the compass with a PM3100, and installing a helix antenna. Then he tried to move the compass to a distance of 15 centimeters from the power wires. Changed the value of the parameter “EK3_MAG_M_NSE” to 0.07 to reduce the sensitivity of the magnetometer. But all this did not help.
I will leave a video of one of my flights and a log file. I will be glad for any help
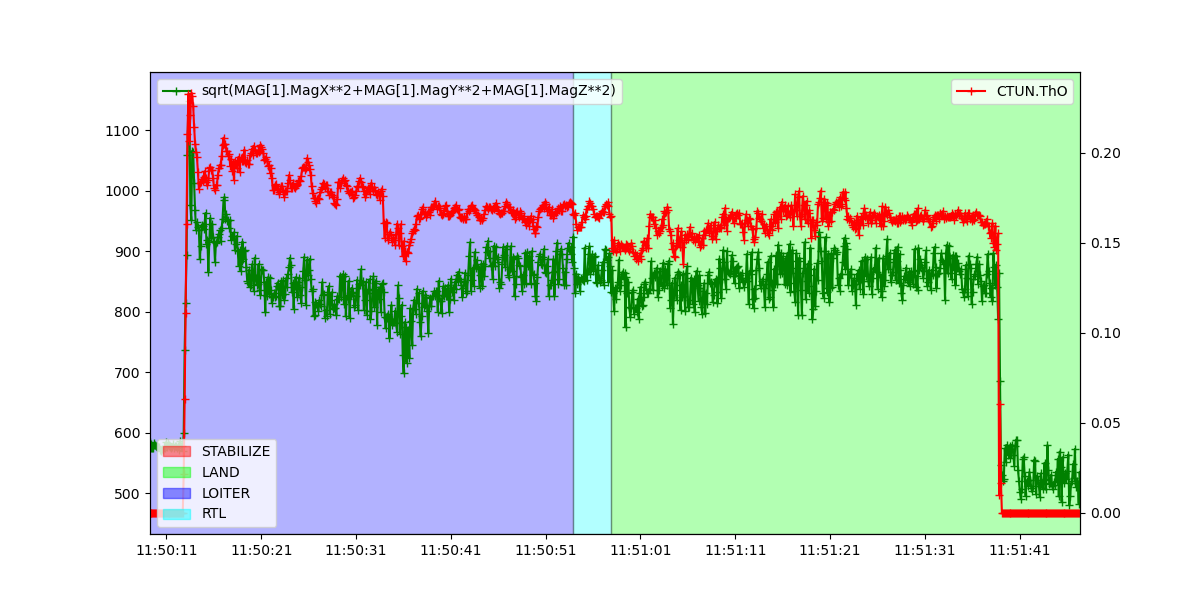
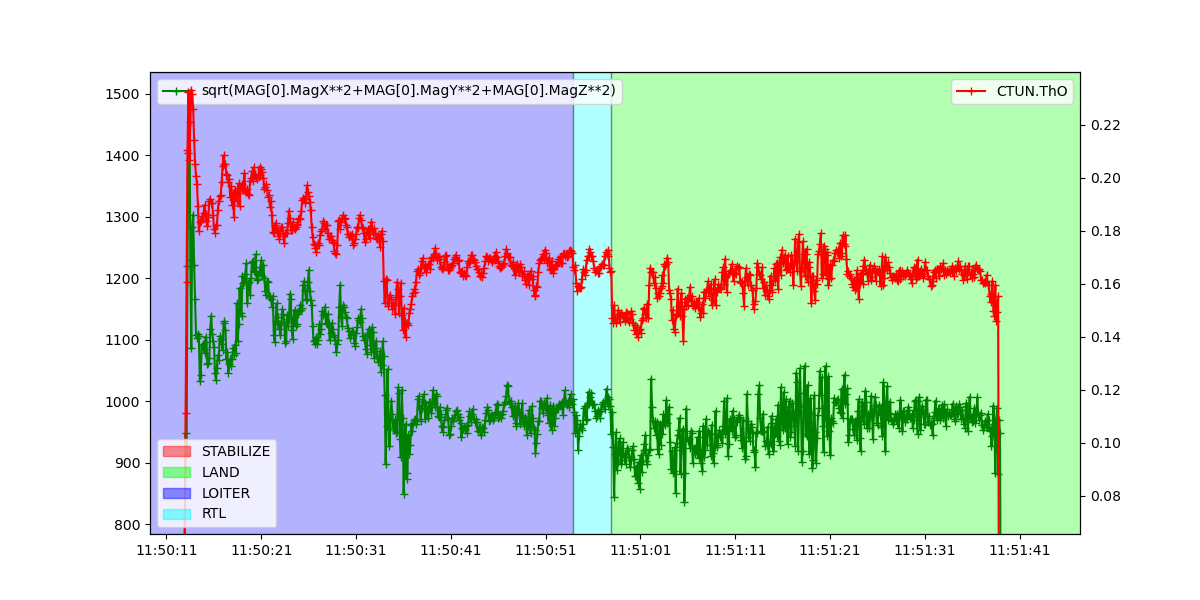
Both compasses are reacting directly to the throttle output, so they are showing signs of interference. Not just the compass, but look at how the wires go to and from the compass to see if you can get those away from the power leads.
Thanks for the answer!
I tried to use different firmware starting from 4.3.0
I tried to move the compass away from the power wires (10, 15, 20 cm), but it did not help.
Once the drone gains altitude, it stabilizes and I can fly, but the climb is terrible.
I’ve noticed that this doesn’t happen everywhere I fly, but most of the time it does.
I have same problem, I am using pixhawk cube orange 2 22000mah lipo battery and X8 Pro Motor with X8 quadcopter configuraiton. Can you fix this problem?
same problem to me. take off in alt-hold fine and after 15 second it start to bounce and EKF ground mag anormally apear. i will try to update to 4.3.3. i will inform you. (octoquad black cube arducopter 4.0.3)
Because we have a whole fleet in several different cities and several different countries and we cannot run FW updates every three months. When there is a critical safety correction, of course, we stop everything to do it.
Also, Autopilot FW update goes through a validation by the local CAA, in some cases.
Yes, because earlier this year, we got a similar behavior in a prototype - we “ignored” it and during one of the takeoffs it did an “emergency yaw reset”, quite dangerous, and we comanded a flight termination (crash).
On that prototype, the position of the GPS/Compass wasn’t ideal, that’s true, but in the log above it is positioned the same way as the rest of the fleet.