Hi,
The issue of EKF2 yaw inconsistent did not exist in PX4 based firmware (I have tested Copter v3.5.5) on the same piece of hardware. If gyro(s) is drifting, does it mean that this prearm check was not existing in PX4 based firmware?
yes, that is probably the issue. Do not use ArduCopter 3.5.5 please update to 4.0.4-rc3
I posted in another thread and did not get any replies. I have a 250mm quad running AC 4.0.3 on PHL, now that I got it flying fairly well, sometimes not so good flights when in alt_hold or loiter modes.
Issues: works fine and then sometimes:
- Alt-hold starts pulsing up/down, you can see it some times, but you can definitely hear it.
- Loiter mode, will be stable then just kick the quad ~5 degrees nose up and starts drifting back
Log and pictures attached.
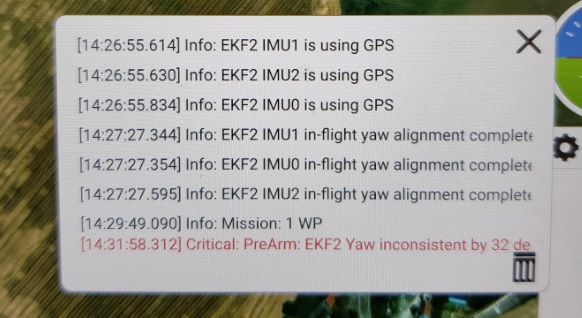
I have the yaapu telemetry on my x9d and when it gives this message"warning EKF primary changed:1" (it sometimes give gps glitch, error velocity variance) it starts flying bad in alt-hold and loiter, switch back to stabilize and its fine. A power cycle and its ok until it randomly acts up again (1 in ~3 flights). I have powered up and set on top of a wall away from all power lines/etc, let the gps stabilize (~15sat/0.6hdop) and I will get the above warnings without firing up the motors. I had a lose FC mount, fixed that, the 3dr 900mhz modem was above the FC and it’s antenna under the gps, I have moved that, no change, disabled the PHL onboard compass (SPI mag, now using the I2C mag in the GPS unit in stead of both). If I need to move the gps/mag higher, I will do that if you think it will help (if yes, how high?). The quad has never been crashed.
My quad has a 4n1 esc just below the PHL FC, and above that and 2 inches forward is the M8N gps/mag. The FC is soft mounted, i could try hard mounting it if you think that might help (has 6000 gyro). Included a pics to see if its a layout issue?
Is it hardware, hardware layout or it might be a code issue,not sure.
Log file here https://www.rcgroups.com/forums/showpost.php?p=45277301&postcount=4931
Suggestions?
TIA
Not much to see in that Flight Log. You mention AltHold but I only see Stabilize at Takeoff and Loiter. And no EKF errors. Make another flight and post that log. Perhaps in a new thread…
1 Like
@ dkemxr
I re-uploaded the correct file, please take a look when you have time.
After looking, if you want me to start a new thread I will, let me know, thanks!
I started a new topic like you suggested and added new log and param files.
Hello All,
I am pretty new in the forum and I have the “EKF2 Yaw Inconsistent” in my Hexacopter wihan th a fmuv3.
I have noted than if you startup the copter inside a building, the GPS can not detect any satellite and the problem do not arises.
Last beta test release 4.0.5 rc2 has a bugfix about GPS acuracy. Could this release solve the problem? Has someone test it with this problem?
I start to use ardupilot some months ago and I am afraid use beta tests releases.
Thanks in advance
We in the ArduCopter community have a slightly different lingo.
The “stable” release you’re running is actually the “beta” from two months ago, with a handful of bugs undiscovered yet. The “beta” you can load today is the former “stable” with a couple of that handful of bugs getting tentative workarounds.
The beta test release that you’re afraid to use, is here actually the “dev” firmware.
So go ahead and load 4.0.5-RC2. See if the error goes away 
1 Like
Thanks for the clarification, I will check the 4.0.5-RC2 on the weekend.
I will come back with the feedback.
Is this cause of my hexacopter crash?
Flight Controller: PIXHAWK PX4 2.4.7
Firmware version Copter 4.0.5
Transmitter: “FrSky Taranis Q X7 ACCESS 2.4GHz 24CH Mode2 Transmitter with R9M 2019”
ESC: Hobbywing XRotor 40A-OPTO ESC
Motors: Tarot 4108 High Power Brushless Motor (380kv)
Battery:6S.
Frame:Tarot 680Pro
Log:
Can anybody have look at log and help me what was wrong.
Hey, I just noticed the same behavior (but with EKF3) (worth pointing out, I do not have a GPS fix right now, as I’m inside). @rmackay9, can you comment on why we can omit the PreArm: EKF2/3 Yaw inconsistent by x deg just by pointing the tip of the vehicle towards north?
Hello,
I have the message “Critical: PreArm: EKF2 Yaw inconsistent by XX degree” appearing after flying on a new quadcopter that I just made.
I am using a Black Cube with a Here2 Antenna with the latest firmware 4.0.7 and have performed several compass calibrations before contacting you, but it does not work, the message comes back at times.
Do you have a solution?
I am attaching the logs to you.
https://drive.google.com/file/d/1GOIcdF57UJA1t1xGwfwQHHVM4TmPVrU2/view?usp=sharing
Hi,
I having too the “Critical: PreArm: EKF2 Yaw inconsistent by XX degree” appearing after flying.
I have a Black Cube with a Here3 with the latest firmware 4.0.7.
If i takeoff in althold i get a little ‘yaw drift’ between 20º to 30º to the right, but if i takeoff with loiter i dont have any drift.
Any solution for this? I dont have any of this issues in the latest 3.6 firmware (i still have one quad in this firmware because its flawless).
Thank you.
Best, JM
Just because 3.6 did not test if the yaw is inconsistent, does not mean that it isn’t.
S’o porque näo olhas para o problema, näo quer dizer que o problema näo esteja l’a.
I know that, i was just giving more information regarding the problem.
Thank you.
Hi nobody form Hex will confirm that but the Cube Black has hardware problem. It’s heater is to slow and during cold start and heating IMU you will get such messages. The only way to solve this is to wait during first boot to achive desired temperature of IMU and next reboot. During second boot you shoudn’t get andy warning messages.
3 Likes
After more test (If flies very very good in althold / loiter / auto) i still get the message completely random.
Gonna post two logs from yesterday flights - got the message after landing in both logs - for those you are curious about the problem.
LOGS: https://drive.google.com/drive/folders/1buxt0UGLgVcjf5H-rup8zSU-DR1xwT8c?usp=sharing
After upgrading to the new firmware 4.1.0, the message is gone (at least didnt get any error after 2 flights).
1 Like
I upgraded to 4.1.2 and still have problem with Cube Black. New firmware didn’t help. I have to wait for worming up of the cube and do the restart the Cube to disable alert messages.