If i am indoor efk use optical flow and this is correct (without gps fix), but in outdoor with gps fix hdop 0.7, does optical flow still work?
The result is however an unstable quad in loiter. If in outdoor I disable optical flow with only GPS and compass I have a very stable quad instead.
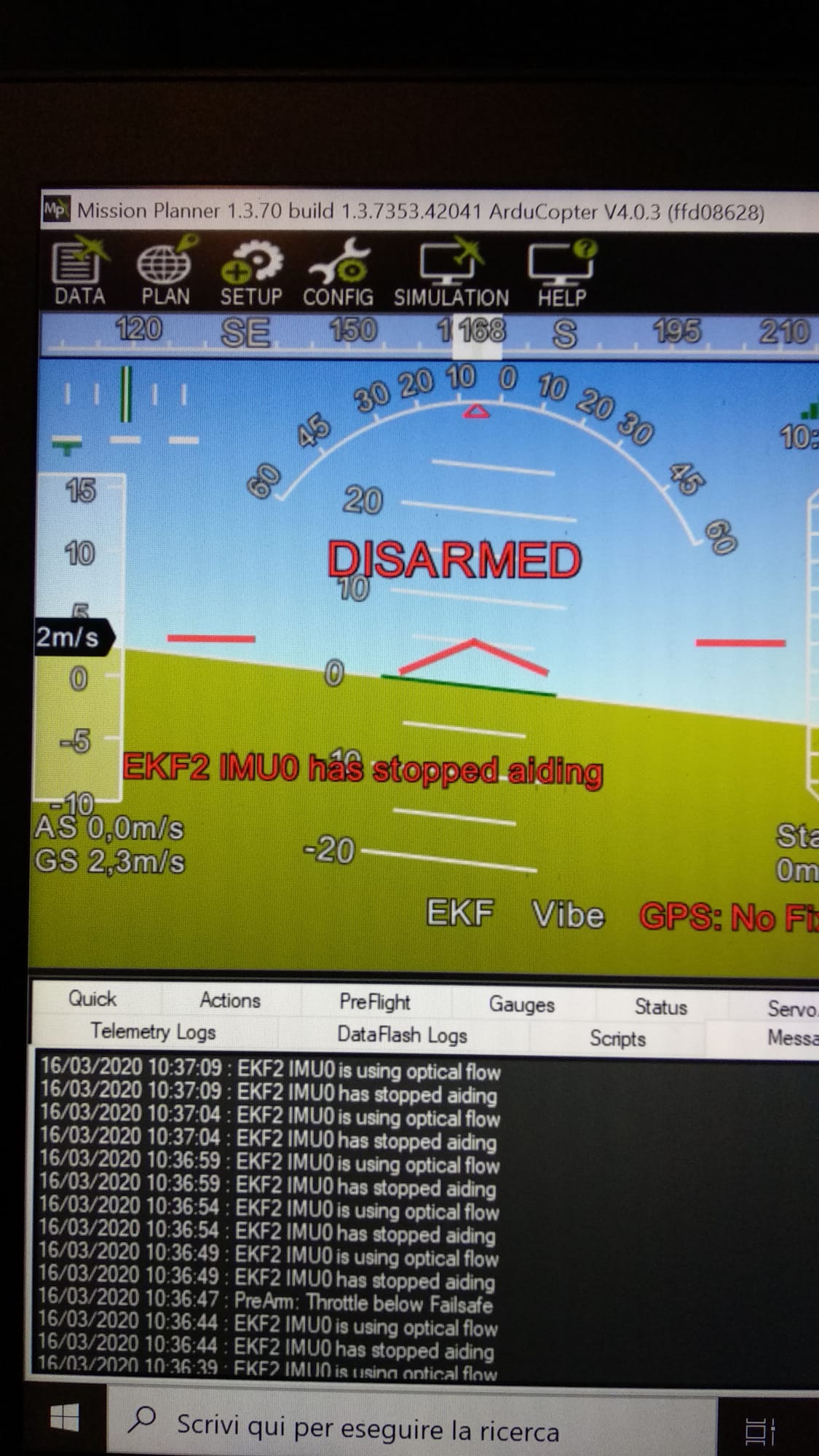
This is planner’s messages in indoor with active optical flow without gps fix
Yes, actually the EKF is blending both signals and will progessively reject a bad Gps and use the opticalflow as the velocity estimator (with IMU as state estimators as well). When Gps gets back to normal the EKF will mix it back.
There is are parameters EK2 and EK3 than set the gps and other state estimators confidence levels
This sets the number of standard deviations applied to the optical flow innovation consistency check. Decreasing it makes it more likely that good measurements will be rejected. Increasing it makes it more likely that bad measurements will be accepted.
I will do some tests … however it would be useful for EKF2 to exclude optical flow in the presence of HDOP <1. Right now my 3" props quad flies well with GPS only outdoors, quite well indooor with only optical flow, but flies badly outdoors with GPS and OPTICAL FLOW together
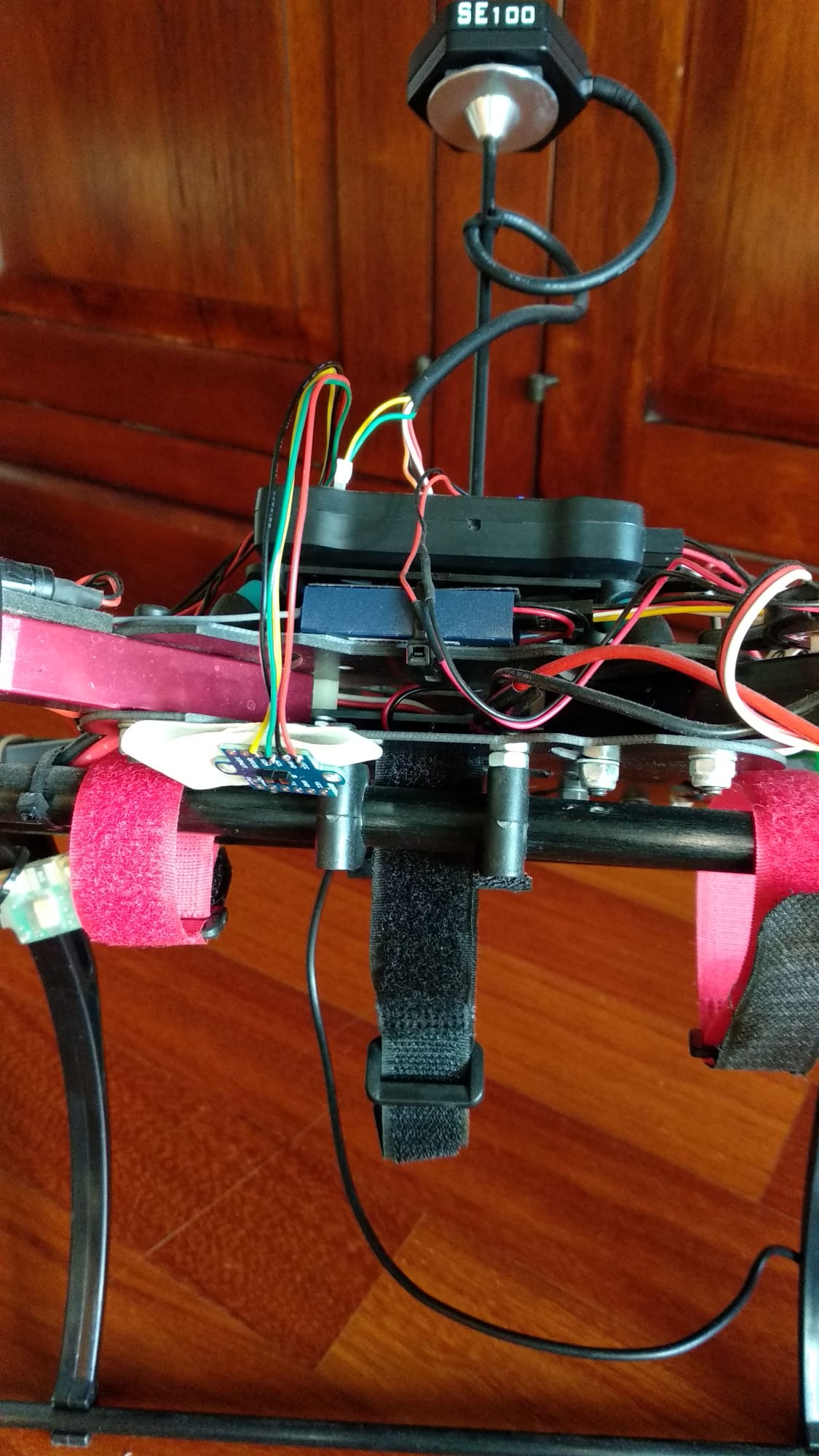
Could using the ST VL53L1X also improve stability?
Because this type of sensor loose the signal when exposed to sunlight.
The ToF based on LED uses a weak signal and are not really made for outdoor sunlight.
Based on the same technology , the BENAWAKE TFMini is able to go up to 6 Meter outdoor .