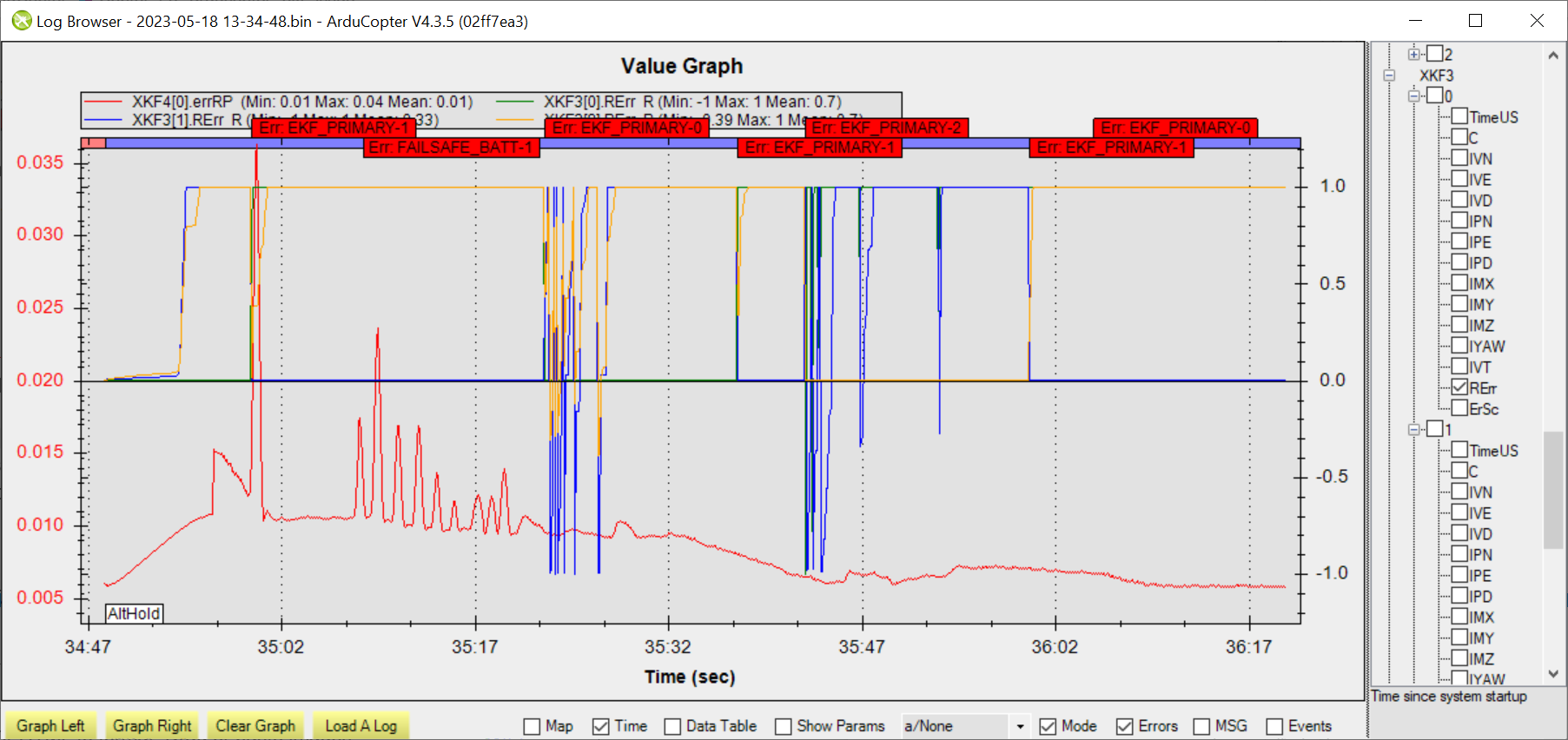
I have small issue with my copter and log analys. I don’t know why my EKF lane is changing during the flight. I have no big vibration or oscilation. Pixhawk is fuly dampered, placed in warm, cosy place ( no wind, stable temperature etc))
Could it be that you’ve left the AP’s internal compass enabled?
With such a high-powered copter that is bound to cause issues when the internal compass suffers from a lot of interference. I suspect the lane changes are caused by the difference in compass readings…
Hi @Pimpelpimpel. Is this something that you can reproduce fairly quickly and easily? If yes, can you please set LOG_DISARMED=1 and LOG_REPLAY=1 and send a log across from a future flight which shows the same problem. This will make a really big log, but it would greatly aid in debugging some EKF lane-switching issues
By the way, your log shows very high height innovations which most likely stems from a noisy barometer (check for a stream of airflow over the baro from somewhere?)