I planned a mission to follow a square indefinitely, almost on every corner the copter changed EKF primary and switch EKF lane. This started happening after I increased WPNAV_SPEED to 1500cm/s.
Vibrations are also not very high, they remain around 20 on average.
And since HNTCH is not enabled on All IMU’s does this mean when EKF switches lanes, I loose filtering?
Don’t underestimate the impact of vibrations, especially if the only thing you changed was the speed. It’s normal vibration levels will increase with forward speed.
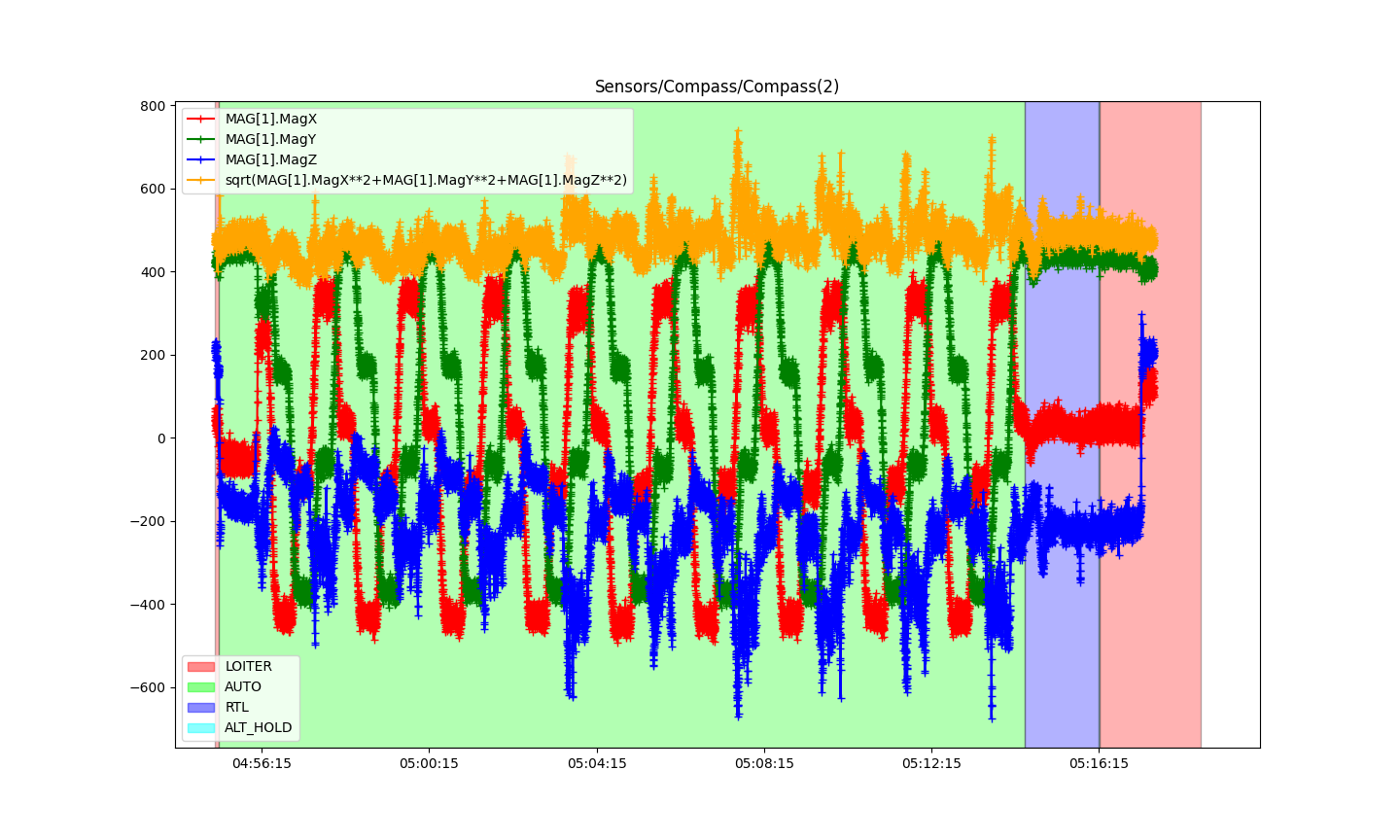
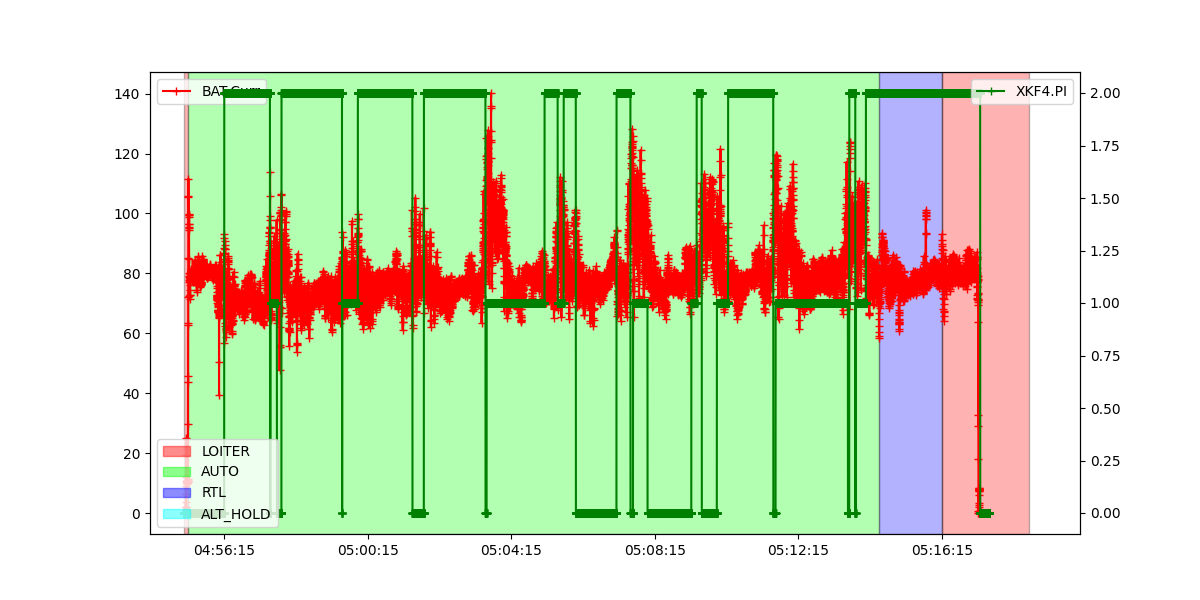
On the two compass graphs the yellow line should be reasonably flat. You might want to try running MagFit on the two compasses to dial in the COMPASS_MOT values. That might help correct for some problems. The last graph shows the EKF3 lane switching, and there is correlation between big changes in current flow and the lane switching. This could be coincidence, but running MagFit and setting COMPASS_MOT would be an easy enough thing to try, with no real down sides.
Mag[1] is the internal compass and it’s close to the PDB, that’s why the variations. But Mag[0] is a here 3 gps mounted away from all the wirings ! Could it be that since I’ve extended the gps wire, there’s no shielding on half of it, that’s why it maybe picking up noise ? But yeah i will do magfit anyways.
My copter is a 30inch hexacopter. Would it be beneficial to lower ACCEL_FILTER from 20 to 10 ?
And do I need to enable harmonic notch on all imu so that in future if it switches lanes, the harmonic filter should still work?
As far as I understand the harmonic notch filter applies to all IMUs. INS_HNTC2 is a second filter, not for the second IMU. But please, somebody correct me if I’m wrong about that.