All
Here is analysis window from last flight.
Is fine at startup, all alerts and fail safes clear. When a few meters off the ground it starts toilet bowl yaw and goes through some EKF lane changes. I seems to settle on a lane and flight can resume as normal. Yaw event is SCARY!
I have posted the Auto Analysis below and the logs for the last couple flights are in:
Log File C:\Users\kowpa\Documents\Mission Planner\logs\HEXAROTOR\1\2023-09-07 10-01-00.log
Size (kb) 21500.7333984375
No of lines 240562
Duration 0:22:52
Vehicletype ArduCopter
Firmware Version V4.1.3
Firmware Hash 2fb939a1
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = UNKNOWN - No ATUN log data
Test: Brownout = GOOD -
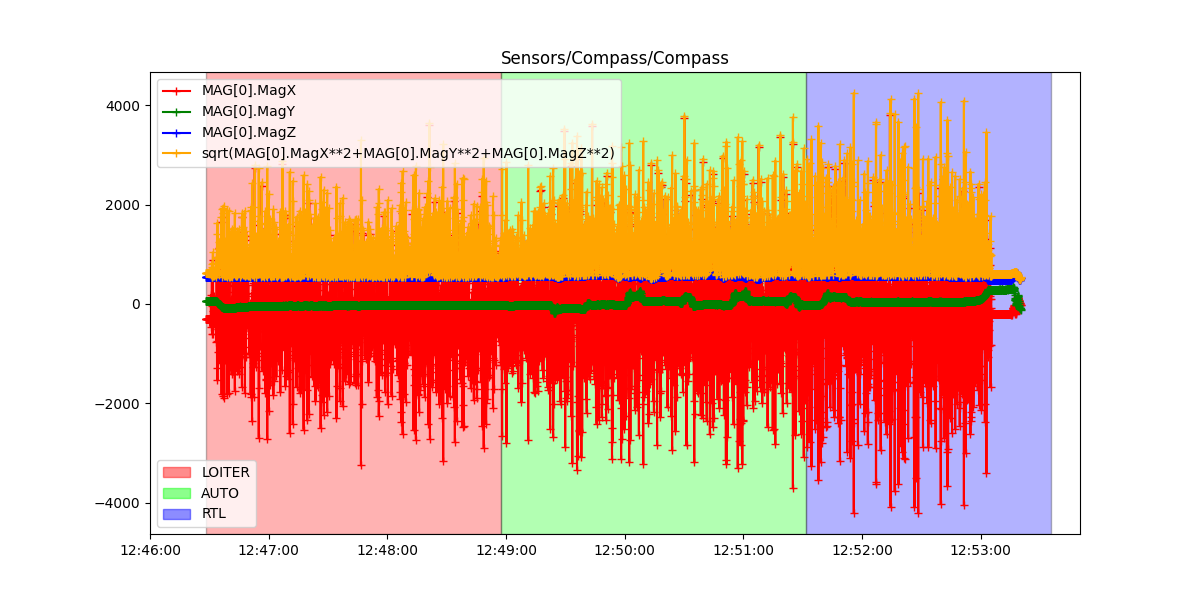
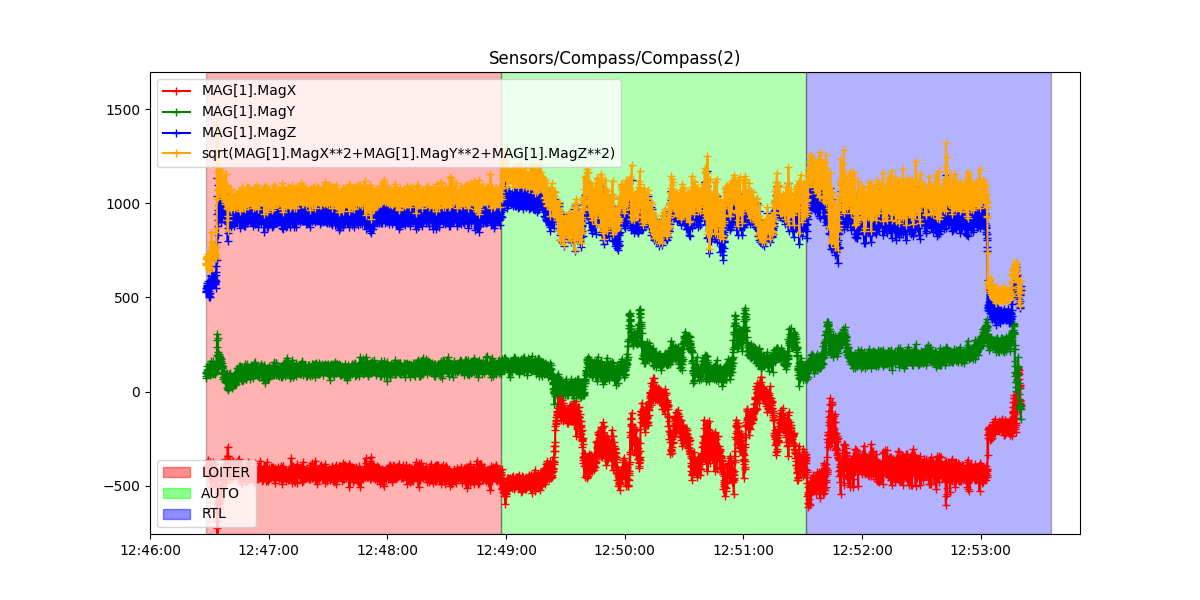
Test: Compass = FAIL - Large change in mag_field (5461.32%)
Max mag field length (27211.99) > recommended (550.00)
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = FAIL - ERRs found: GCS FS_THR
Test: GPS = GOOD -
Test: IMU Mismatch = NA -
Test: Motor Balance = UNKNOWN - ‘HEXA/X’
Test: NaNs = FAIL - Found NaN in CTUN.DSAlt
Test: OpticalFlow = FAIL - ‘FLOW_FXSCALER’ not found
Test: Parameters = FAIL - ‘MAG_ENABLE’ not found
Test: PM = GOOD -
Test: Pitch/Roll = GOOD -
Test: Thrust = GOOD -
Test: VCC = UNKNOWN - No CURR log data
amilcarlucas
Thanks for the response. Do you have to save all your copter settings before you upgrade or are they all conserved?
Sorry, I had a support guy helping me with the last one.
Please let me know if you have any guidance.
m
Latest Flight
Still getting toilet bowl yaw on takeoff with EKF3 reset.
Below is Log analyzer and Hardware Checker report.
Please help. Hardware Checker.pdf (838.4 KB)
Log File C:\Users\kowpa\AppData\Local\Temp\tmpCD40.tmp.log
Size (kb) 19943.9443359375
No of lines 229149
Duration 0:06:52
Vehicletype ArduCopter
Firmware Version V4.4.0
Firmware Hash 502702df
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = UNKNOWN - No ATUN log data
Test: Brownout = GOOD -
Test: Compass = FAIL - Large change in mag_field (838.80%)
Max mag field length (4250.04) > recommended (550.00)
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = GOOD -
Test: GPS = GOOD -
Test: IMU Mismatch = NA -
Test: Motor Balance = UNKNOWN - ‘HEXA/X’
Test: NaNs = FAIL - Found NaN in CTUN.DSAlt
Test: OpticalFlow = FAIL - ‘FLOW_FXSCALER’ not found
Test: Parameters = FAIL - ‘MAG_ENABLE’ not found
Test: PM = UNKNOWN - ‘NLoop’
Test: Pitch/Roll = GOOD -
Test: Thrust = GOOD -
Test: VCC = UNKNOWN - No CURR log data
Would you be good enough to look at my report and tell me which step I should be starting at?
This is not a new build I don’t need to go back to installing radios and GNSS modules.
If I look at it the differences I see between your report in the link and mine is;
Accel temperature calibration
Gyro temperature calibration
Iron Calibration
What is Iron calibration? Just the compass calibration?
Any jumpstart you could offer would be appreciated.
Please look at the report and see if anything jumps out.
m
Iron calibration is something that you should do as your second flight. See section 4 of the blog post.
The .pdf is inconclusive. Post a .bin log file. But typically the vibration levels are too high. And reading the ENTIRE blog post will help you a lot, especially the first sections
Well, “it’s something you should do” or something you may want to understand what you are doing.
Hard-Iron Distortion. Hard-iron distortion is produced by materials that exhibit a constant, additive field to the earth’s magnetic field, thereby generating a constant additive value to the output of each of the magnetometer axes.
Soft-iron distortion is the result of material that influences, or distorts, a magnetic field—but does not necessarily generate a magnetic field itself, and is therefore not additive