Hello everyone,
Is their any chance that EKF3 algorithm might give us incorrect values in flight (i.e, Desired Roll, pitch and Yaw values from below).

log :- https://drive.google.com/drive/folders/1UJytROUMKsrDhoNtjaywSB8kPCkG1lTm
Hello everyone,
Is their any chance that EKF3 algorithm might give us incorrect values in flight (i.e, Desired Roll, pitch and Yaw values from below).
log :- https://drive.google.com/drive/folders/1UJytROUMKsrDhoNtjaywSB8kPCkG1lTm
Your log isn’t publicly accessible.
Hello,
The Ek3 Algorithm will estimate the orientation of the copter, but it will not directly estimate the desired roll and pitch values during flight. Perhaps Ek3 relies on accelerometers, barometers, and magnetometers inside the flight controller to predict roll and pitch.
Also from the Log provided magnetometer state innovations are pretty high.
It should be below 50 m/s.
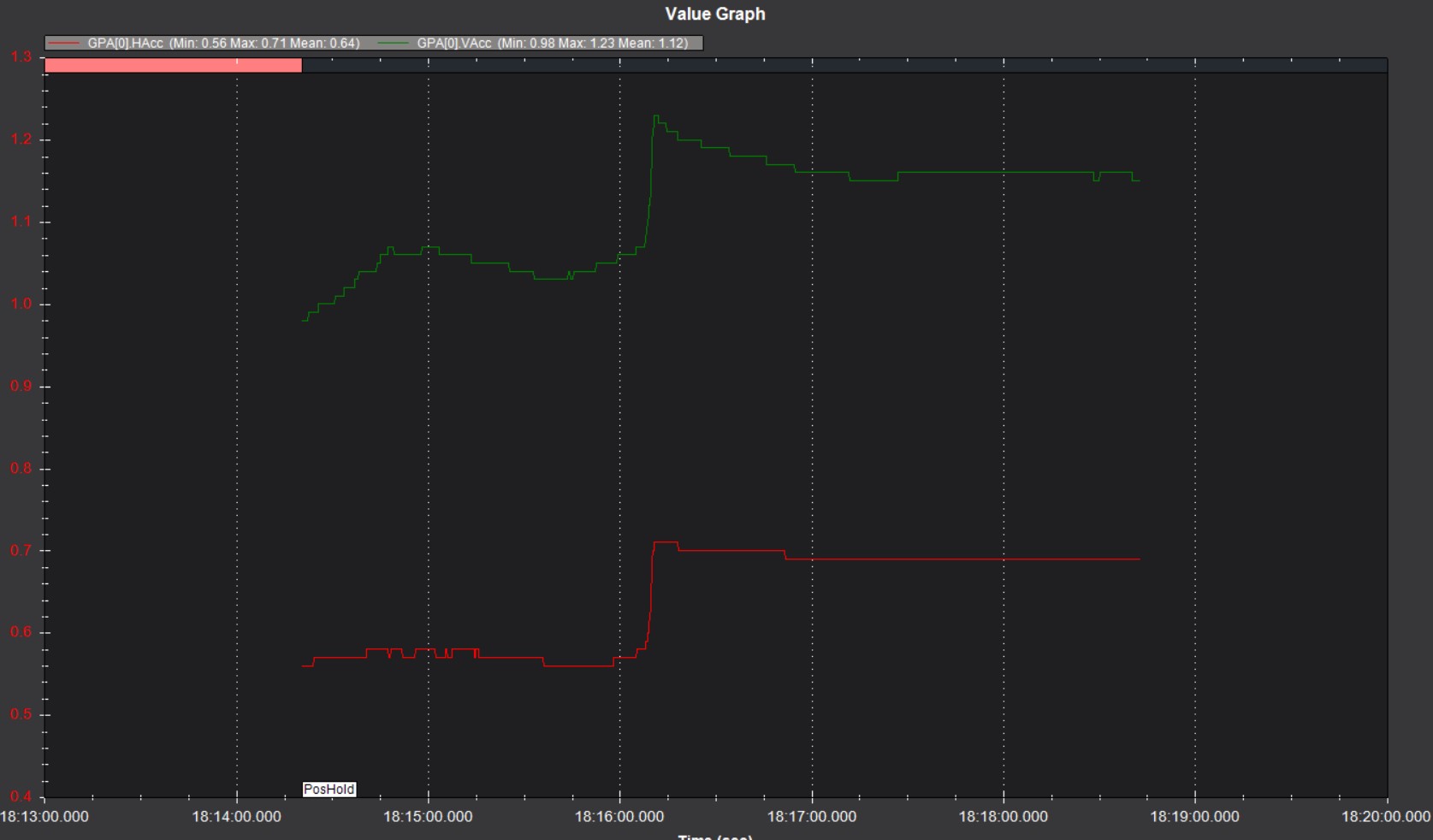
Also from the log, Observed that your Gps (GPA) HAcc VAcc are pretty inaccurate as the flight progress.
Also you had a message of Crash check-1 that is due to inconsistent in Altitude information from GPS.
GPS alt after landing indicates a lower altitude than the reference altiude, which is why Ek3 estimated that the drone was crashing.
I could assume from the log that GPS is not reliable for estimating altitude.
refer this Understanding Altitude in ArduPilot — Copter documentation
Anyone can correct me if I m wrong, Since I m new to log Analysis.
Desired roll and pitch come from the pilot.
The EKF does estimate the real (actual) roll and pitch.