Hello sir.
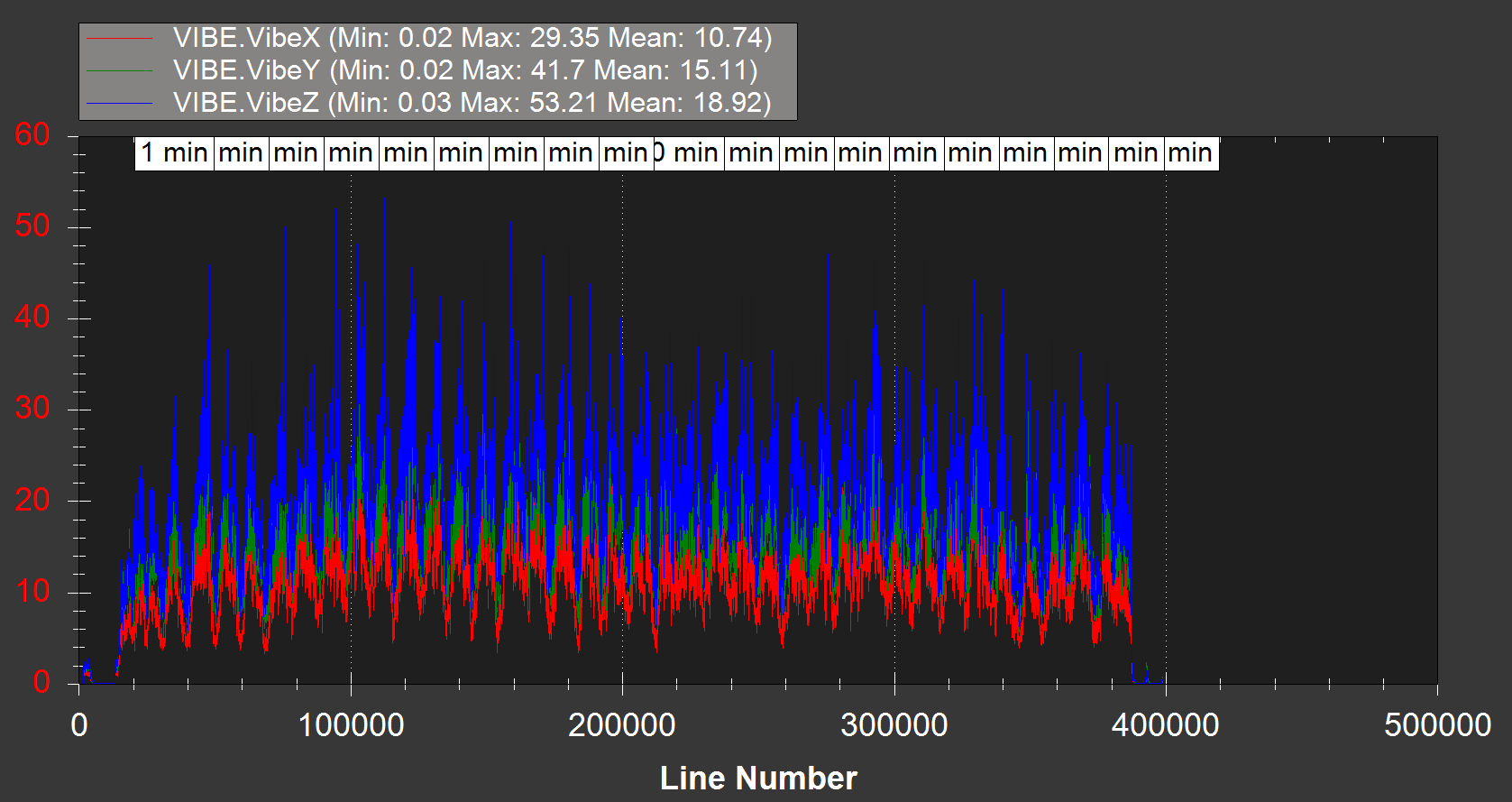
You have a considerably small quad considered those I am currently working on and first I notice you have a high vibration on Z-axis. And also have some vibration on the X and Y axes, too.
I recommend you first need to do Harmonic Notch Filtering.
https://ardupilot.org/copter/docs/common-imu-notch-filtering.html#setup
When you do this and have a quick loiter flight, we can see the vibration’s frequency and magnitude.
Please follow the tutorial for this setup.
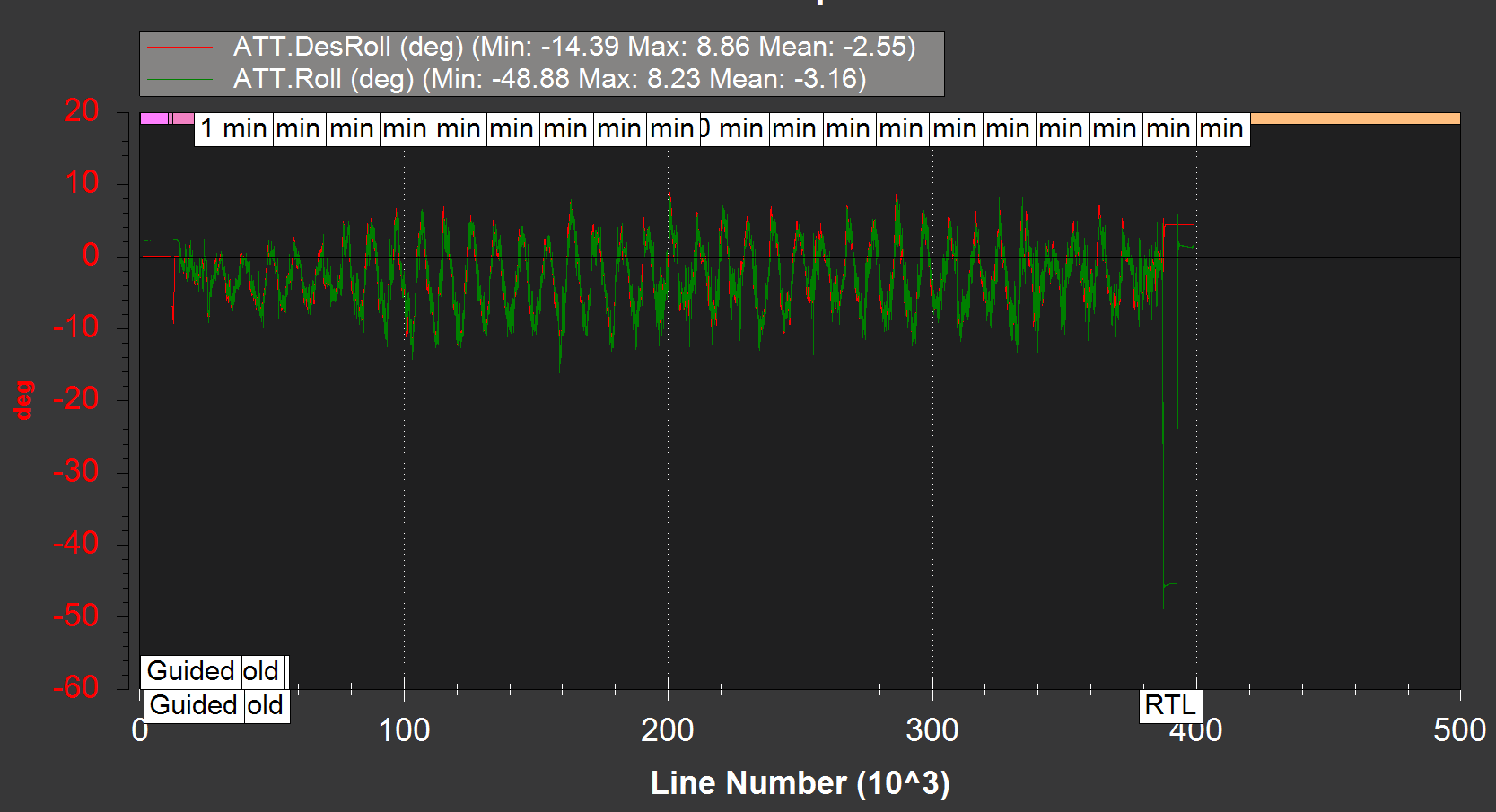
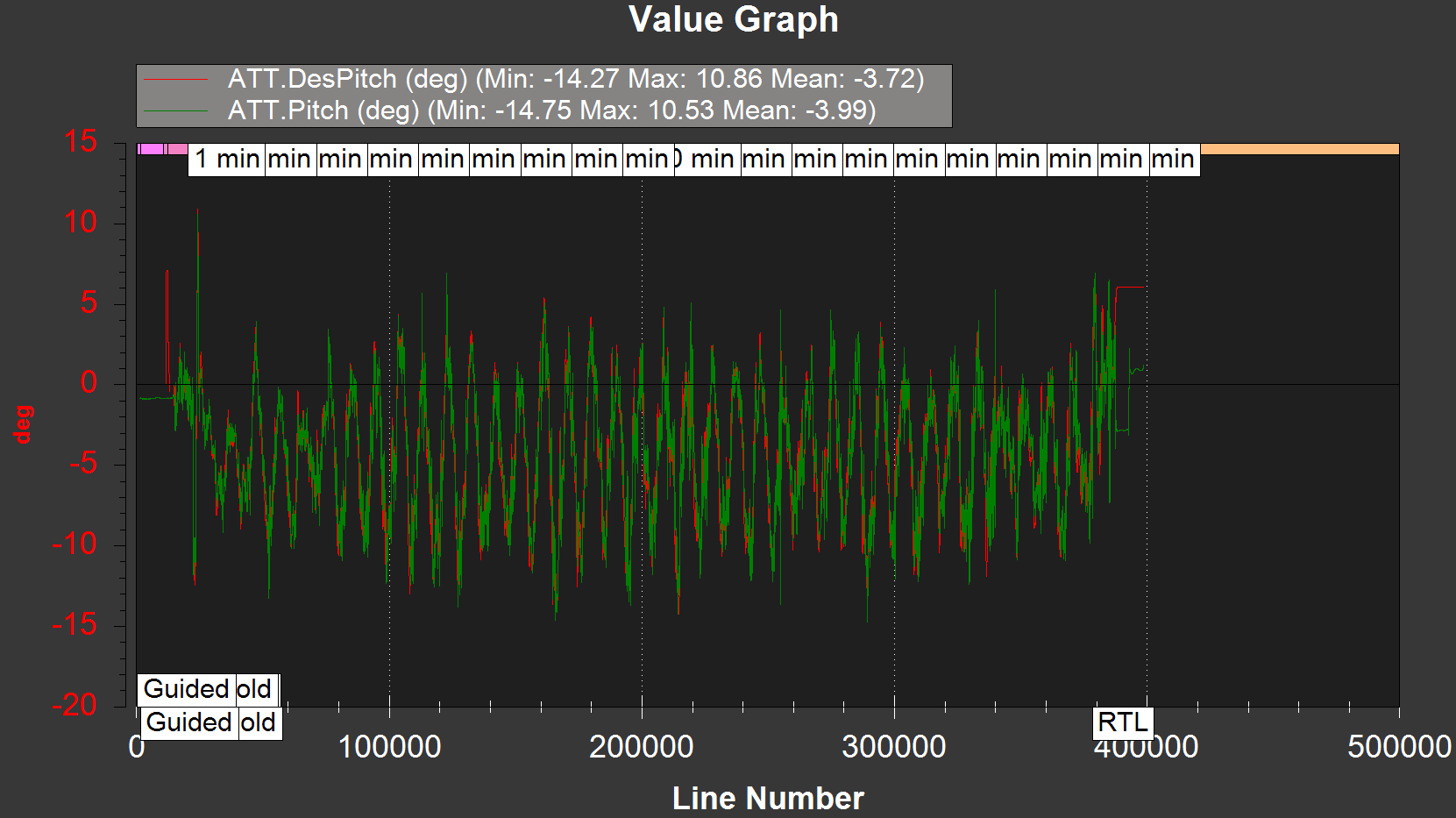
You have also PID issues on both roll and pitch axes.
They are not correctly set.
You need to do AutoTune after setting filtering.
https://ardupilot.org/copter/docs/tuning-process-instructions.html#tuning-process-instructions
https://ardupilot.org/copter/docs/autotune.html
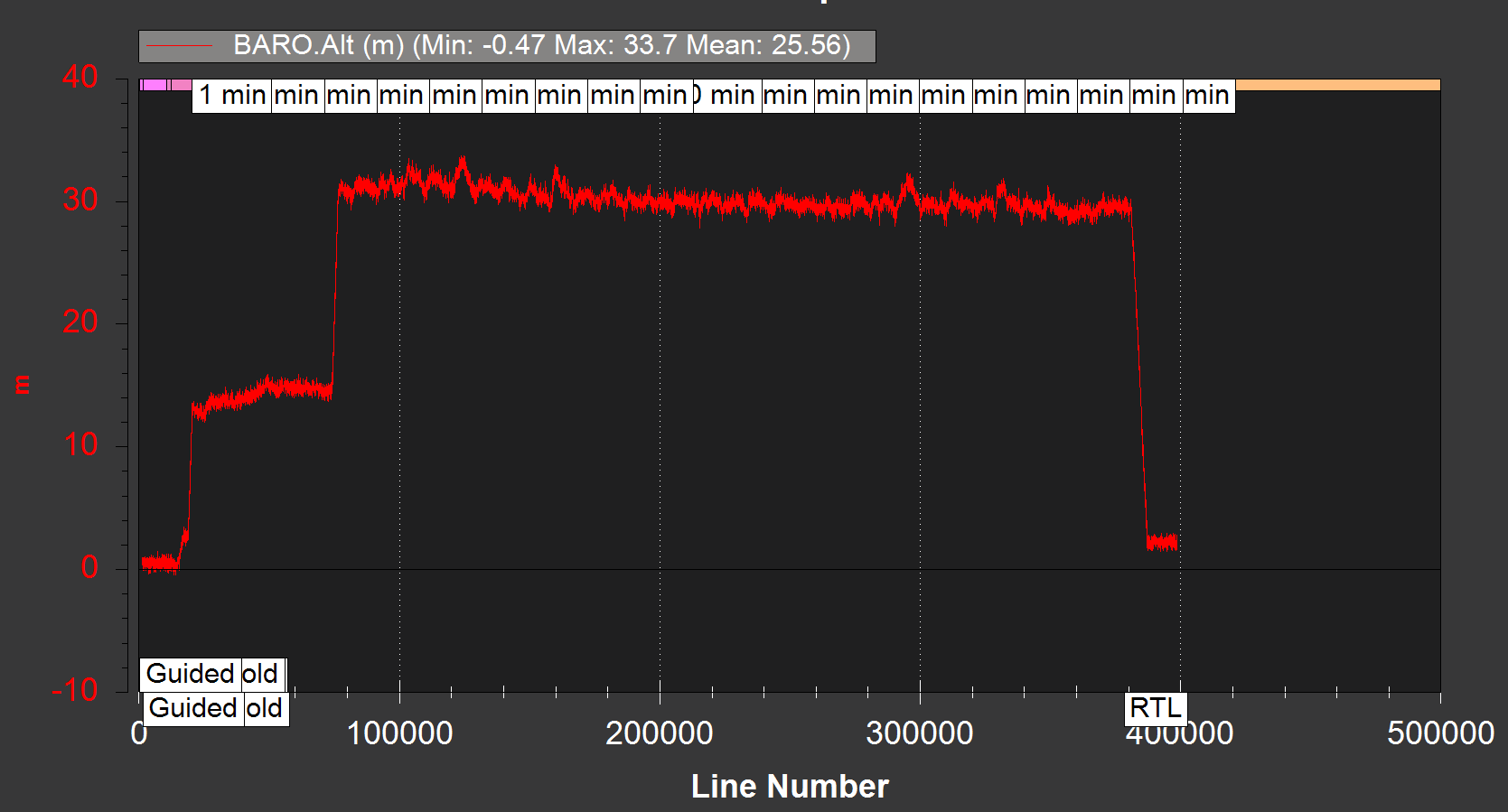
I see that ardupilot able to fly the vehicle since you have a good altitude holding on flying modes those you are using.
So you can do AutoTune after filterings are done.
https://ardupilot.org/copter/docs/common-imu-notch-filtering.html#setup
After you set the parameters for harmonic notch and logging, please post the flight log *.bin file so we can look at, and set the correct parameters for harmonic notch filtering.
After that, I think you can do AutoTune since it can fly safely even if there are some twitching.
Please note that if you have a limited battery, do AutoTune at the axes, separately. For example, roll first, then pitch, and then finally yaw.
And also note that you should wait a calm day, no wind.
Your propulsion system seems to OK, not underpowered so you are good to go.
I see that the first motor has more output than the average of others, I don’t know whether this is an issue or not.
Maybe others can comment on this.
Also please check whether or not your propellers are correctly balanced.
I hope this helps.
Mustafa