I loaded firmware from the “latest” folder a couple of weeks ago…
Recover your health soon Greg, prayers from Argentine 
1 Like
Just had my first transitions with this setup…everything went well for the most part…took off in Qstablize…then switched to Qloiter at about 15feet alt…held position fairly well in the 8mph wind…then tried FBWA and gave it about 60% throttle…and it transitioned smoothly but had to give it a little nose up to climb out…flew around some to let trims get set…then went to Cruise mode for a while and transitioned back to Qloiter…it held position at the point where it decelerated to…nice
then I dumb-thumbed…tried to flip back to FBWA, and went all the way to manual…crashed since it couldnt accelerate fast enough(and I was FPV at the time and lost orientation)…broke off the nose…10min later (I always have a battery hot glue gun in my toolbox  ) I was back in the air and finished the pack with a QRTL test…wasnt descending from 300feet fast enough so I switched back into Qloiter and brought it down to land quickly…overall, very pleased…
) I was back in the air and finished the pack with a QRTL test…wasnt descending from 300feet fast enough so I switched back into Qloiter and brought it down to land quickly…overall, very pleased…
- the cruise speed is way too fast…have to adjust that…hence the following:
- I need to find a way to set level for Qmodes different than Plane modes, if it exists…need +3deg pitch in plane since now AHRS is set for 0 pitch to allow Qstablize to not fly backwards at mach 1

- I need to figure out when HOME is set…for plane its at first GPS lock, I think…for Qplane, I hope its set at arm…dont know…I did note that the Altitude is zero’d whenever you land in Qloiter (probably Qhover also, will check)
- Need to increase RTL descent speed perhaps…will recheck QRTL descent then decide…
Nice report, Henry!
I always change MANUAL mode on my VTOLs to FBWA because you have a tendency to turn the 6-position knob all the way in a panic. QStabilze on the other end. Manual makes more sense for planes.
Perhaps the nose up you needed was for the first flight only. It will be interesting to see if the SERVO_AUTO_TRIM took care of it. I’m getting more excited to try mine! 
Well, I found all the answers by just searching some more:
- No, since a plane needs a positive angle of attack and a copter should have none, there needs to be a parameter to change pitch trim (AHRS horizon level) between plane and qplane modes…there is:
Q_TRIM_PITCH…so set up accl level with plane at cruise pitch (usually~2-3deg)…then dial in -2 or -3 for that parameter to have the qplane frame level with earth(really lift plane) in qplane stab modes… - Copter.Plane and Rover all set home at ARMING position…good…so I can get lock under the pilots area and then take to launch spot and arm and it will land there…
- Default descent speed is only 0.5m/s…need to increase that to 1m/s I think…
Edit: A note on setup…first, be sure to check and adjust the tilt motor servos’ output PWM min and max
in the parameters such that in FBWA the motors are in line with nacelles for forward plane flight and that in Qstablize, dis-armed, they are 90deg vertical… also, since the CG for the convergence is closer to the front motors, rather than at the nominal center of lift in copter mode, I had to specify -7 deg ahrs horizon difference with Q_TRIM_PITCH ,even though I have about +3deg for plane mode (the normal acc level)…this is because the front motors have to lift more in a level hover to balance the offset CG, but this induces a pitch up force that has to be compensated, so by having the copter mode level 4 degs more nose down (-7 total instead of -3), it hovers in place…(at least that’s my theory…it cruises with horizon level in plane mode now and doesnt want to scoot forward or back in copter hovers now)
I got my “feet wet” today back into the flying scene and finally got to maiden my Convergence. It flew great and gave me a big smile!
I used Henry’s yaw PIDs and didn’t have any problems that I can recall. There was a light breeze that I kept pointing into during QSTABILIZE take-offs and landings. Transitions were consistent and I had good control in both hover and forward flight modes. I went through three Lipo packs and got a nice low transition on the third back to QSTABILIZE mode. I put it in LOITER mode to show the guys some nice big circles. I may think about adding an air speed sensor this summer.
This is a fun little VTOL that gets small pretty quick. I like it!
I’m still using an older build; Plane v.3.10.0-dev (e3cd0810) that I loaded last December. Here is my .param file from my maiden flights.
GregsConvergence2.param (19.2 KB)
Glad to see another Convergence on ArduPilot.
I’m having good luck with an MS5525 digital airspeed sensor on my Convergence. Logs and videos are here: E-Flite Convergence with PixRacer and SBUS output
It would be interesting to see how it works for you, if you decide to use that sensor.
Hi Mark,
Nice blog! Thanks for posting it. I’m curious as to your thoughts on the benefits of using an AS sensor (analog or digital) on a smaller model like this? How about the need in calmer wind conditions, is GPS speed good enough?
Cheers!
Thanks Greg. I don’t have much experience with “normal” quadplanes or with auto missions, but I think the main advantage of an airspeed sensor would be for use with TECS and perhaps for precise control of airspeed on longer missions. For a small overpowered model like the Convergence with short endurance, I don’t see any real advantage, except for testing sensors and learning how things work.
If there’s no wind, then GPS speed should be fine, although I’m not sure how airspeed estimates are generated without an airspeed sensor.
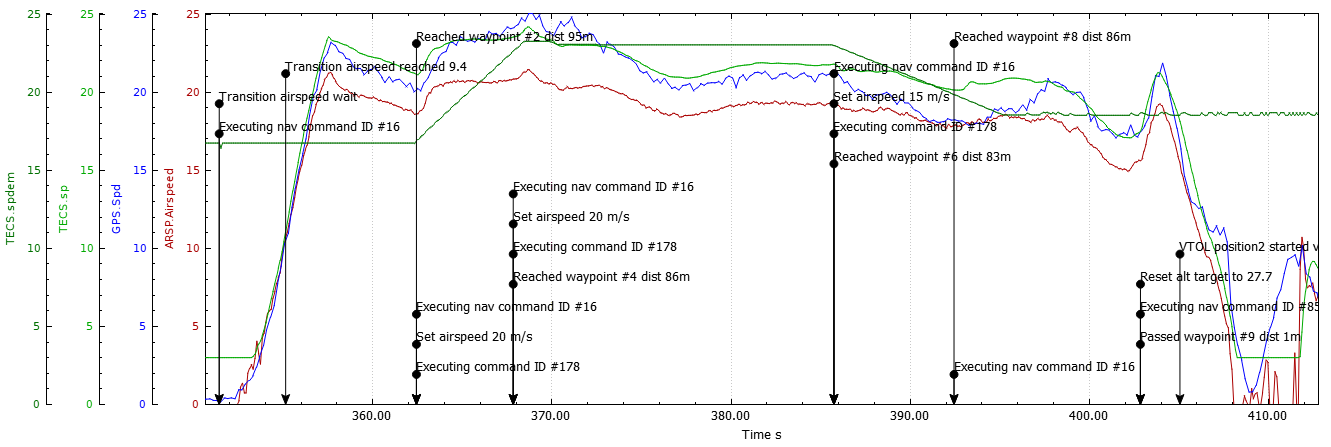
Here’s a plot from one of my auto missions showing a forward and back transition in AUTO mode, along with the TECS speed demand and estimate. The quadplane code does use airspeed to control forward transitions, as indicated by the plot, and it looks like setting airspeed to 20 and 15 m/sec worked too, although the airspeed ratio looks like it might be off a bit.
1 Like
I’ve been playing with using an extra RC channel to add a forward bias to the motor tilt. This allows forward flight in QSTABILIZE, QHOVER and QACRO modes without pitching down. This is the PR: https://github.com/ArduPilot/ardupilot/pull/11548/files
Testing would be appreciated, especially by anyone who is competent with the Convergence in QACRO mode. I’ve done some actual flight testing in QHOVER mode, reported in an earlier version of the PR: https://github.com/ArduPilot/ardupilot/pull/11378
If anyone is interested, but can’t build a binary, let me know and I’ll post them.
–Mark
Interesting! I haven’t had any issue moving the Convergence around the field in QSTABILIZE mode so I am playing with this concept in my mind. You would tie the extra channel to maybe a side lever on the transmitter and use it for slow forward flight? Much slower than the plane can normally fly in FBWA mode?
I use the left slider on my Taranis X9 to control the forward tilt.
And yes, you can set it for very slow forward flight as you would have in QLOITER mode.
It comes in very handy when the wind is blowing; I set it to be greater than the windspeed so that I can make progress upwind without pitching down and adding a lot of power. Note that this also works for non-vectored quadplanes which have a separate forward motor.
QLOITER does this automatically when holding position by increasing forward throttle until pitch demand is zero.
Mark, @kd0aij
On your forward bias feature, if you change the slider control all the way to minimum will the act as normal without the possibility of stability issues? Mostly, I am looking to have it enabled in QHOVER mode and disable it in QSTABILIZE mode using the Taranis setup. If I can hover around at various speeds in QHOVER mode, and, be able to disable it via the slider or mode change via the Taranis, that would be interesting to try.
Would you make me a binary please?
Cheers!
Yes, if the RC input is at minimum, no tilt bias is applied.
I put a binary for the F405-Wing here: https://drive.google.com/open?id=1AbZHCnKn22Vuv0TOVrSqZSYPRqrsqpBh
Thanks for testing, let me know if you need a build for a different FC.
Thanks, Mark! Yes, the F405-Wing is the build I needed.
It looks like I’m all set. Your build loaded and runs fine. Do I only need to set Q_SPD_BIAS_CH to my lever channel on the Taranis? I used 13. What PWM value is considered off? Below 1000 or 1100?
Thanks…
I have my bias channel on the Taranis at default values: 1500us center and +/-100% and the channel min/max/trim parameters set to match (1000/2000/1500).
The maximum amount of tilt bias is set by parameter Q_TILT_MAX, which I have at 25 degrees in my tests so far.
You can see how much tilt will result by entering QACRO mode unarmed, and moving the slider. I see zero bias with the slider at minimum, and about 45 degrees with it at max.
Hi Mark,
I tested the firmware this morning and saw so effect moving my Left Lever in QSTABILIZE and QHOVER modes. Other than that, the plane flew fine in FBWA mode. Any ideas? I do not know what Q_TILT_MAX is set to…just using the default.

can you post a log?
You should see the motors tilt when you move the slider in QACRO
The default for Q_TILT_MAX is 45 degrees