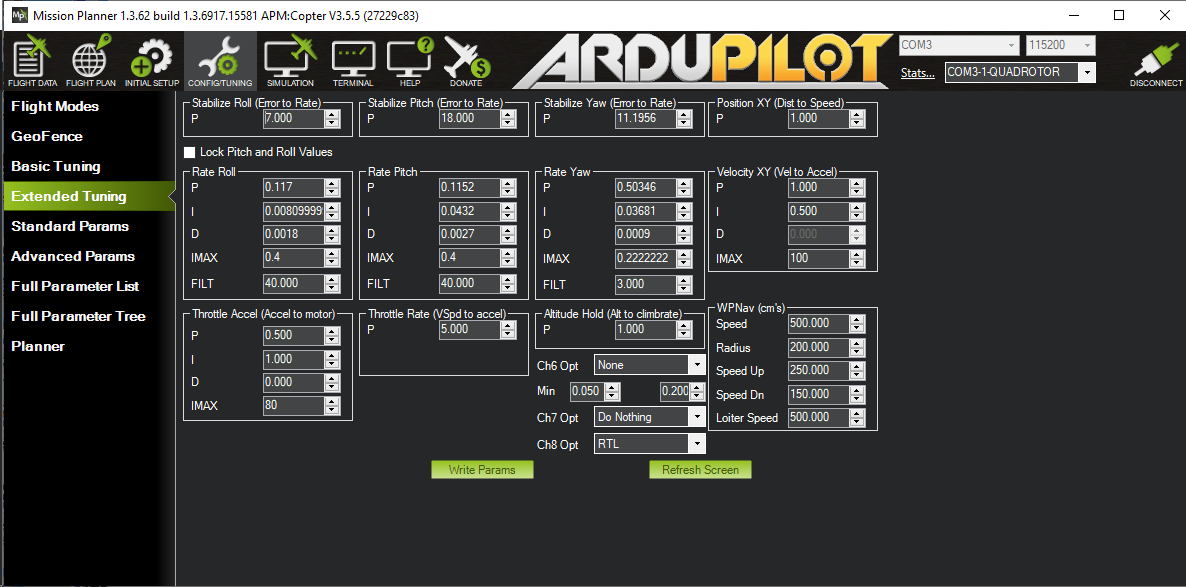
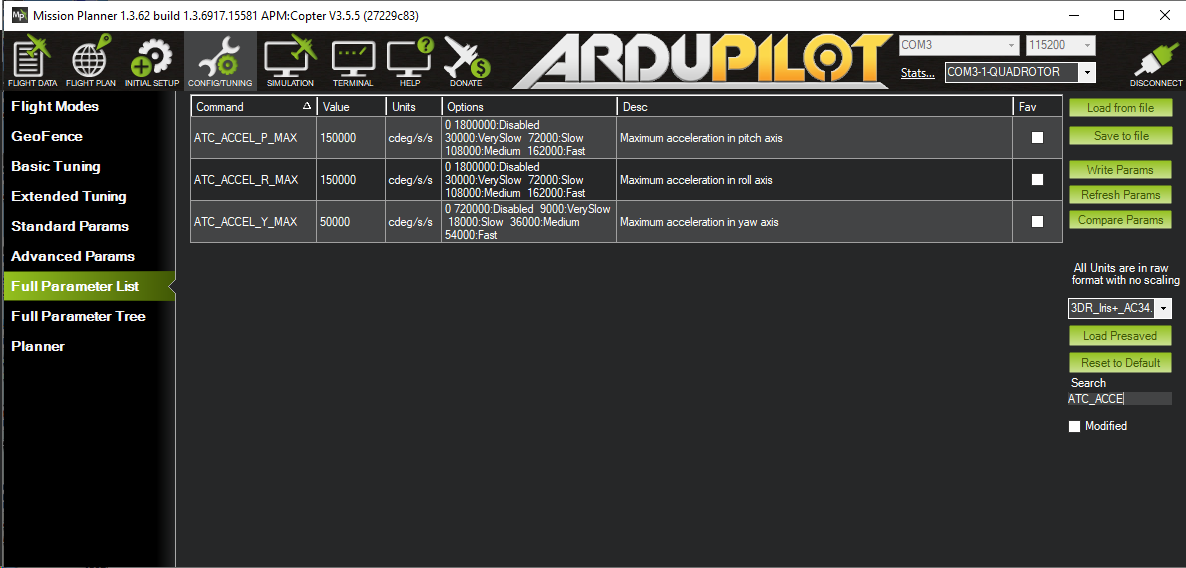
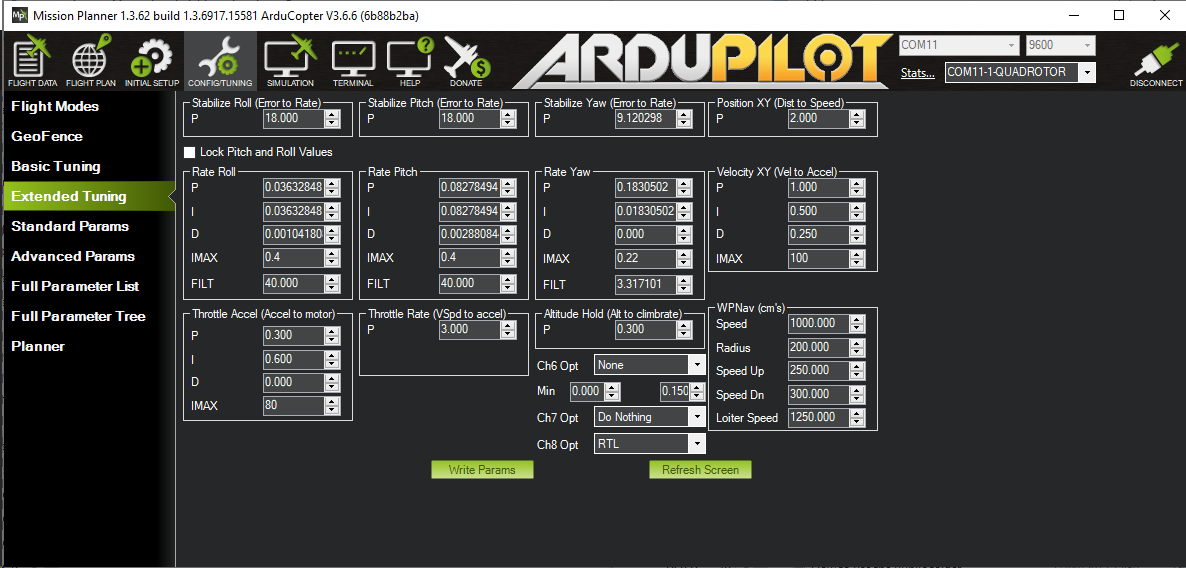
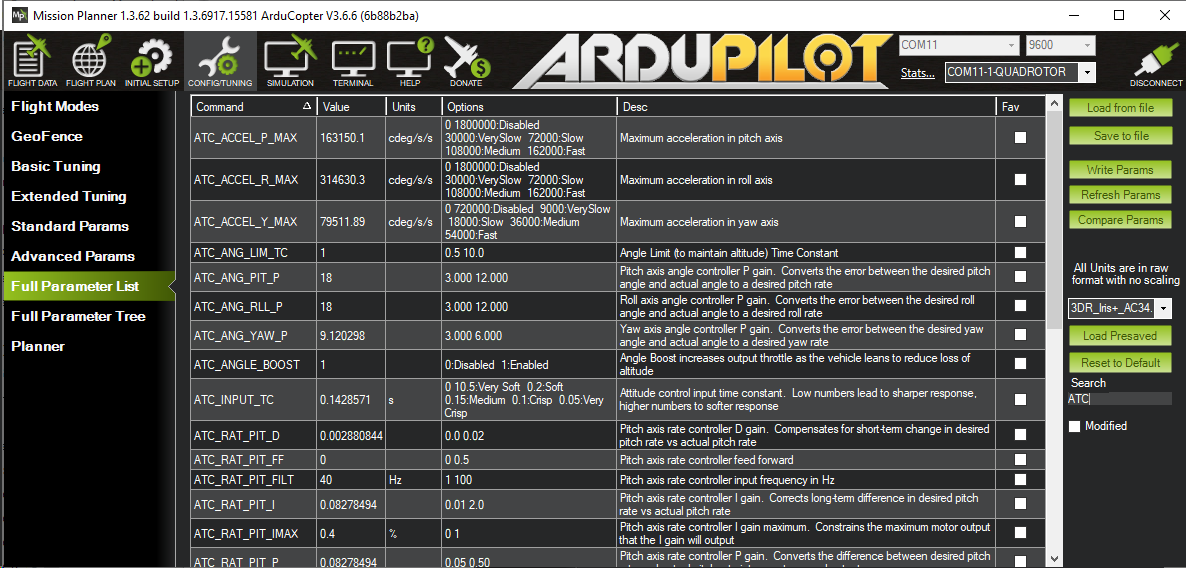
Been trying to get my 250mm quad to fly good in acro, the problem is I have lots of experience with BF, so the bar is pretty high. I did not build this quad in hopes it would outperform BF acro, but it should fly somewhat better than it is now, the response is just slow comparatively (I have removed many delays and tried many things and its better, but not even close), also my roll rates are about half of what I would like (1000dps is max on AC i think).
Another large step forward for BF this week, BF/Skaug just came up with a dynamic notch based on esc rpm telemetry, the few that have flown it says its magic. Here is some words from the dev: https://www.rcgroups.com/forums/show…postcount=5567
Joe came up with the yaw drift fix code that works brilliantly too.
It seems quite far behind as AC is just getting to esc passthrough mode and dshot. Qudos for the autonomous modes of AC!