Ricoman
July 8, 2021, 1:23am
1
https://mega.nz/file/PxVBTKCY#Ox6pLqqPhwjLqXxuYHyvzMKFIJmpSG2bOKsrrZ7RlIs
First, attach the log
my situation
Even with PID tuning, toilet pool is not resolved.
GPS replacement, Compass calibration several times, esc calibration, etc. does not solve the problem
If it is not resolved, look at the binary log
Check that Rll, Des Rll / Pit and Des Pit are not very good
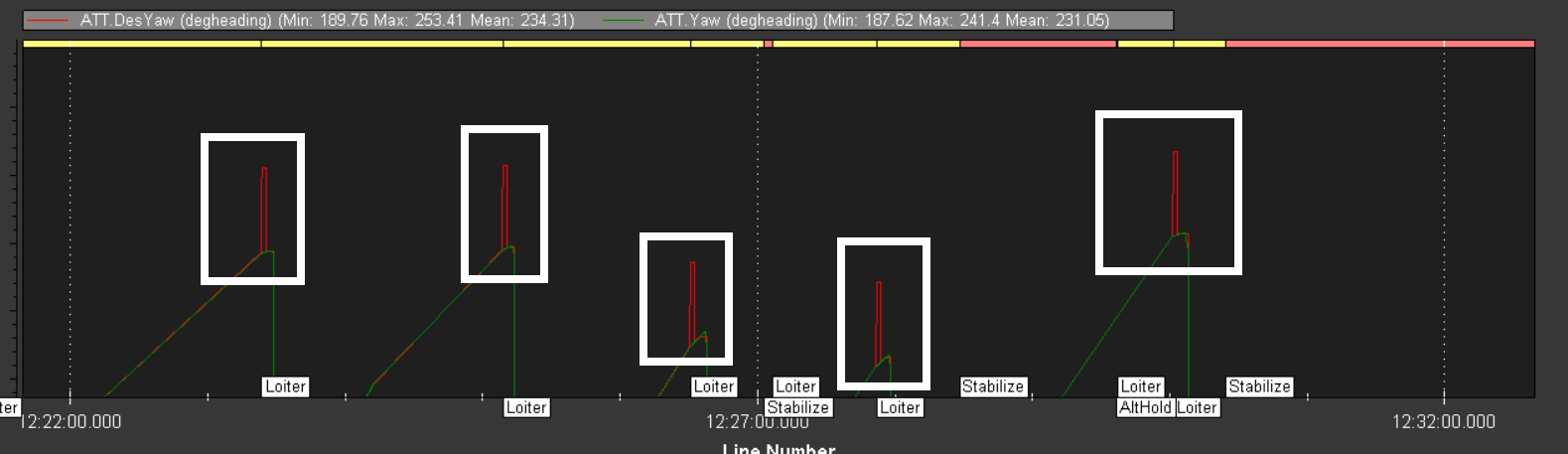
Looking at the graphs of Yaw and Des Yaw, I see something strange.
What’s the des yaw graph in that white square?
I’ve never seen a graph like this
Could this be causing a toilet pool?
No problem in no payload flight
There is no such thing in the graph even with 3kg payload
After additionally equipped with 5kg payload, something like that occurred on the graph along with the toilet pool in flight
To solve that graph, what parameters should I touch?
dkemxr
July 8, 2021, 1:43am
2
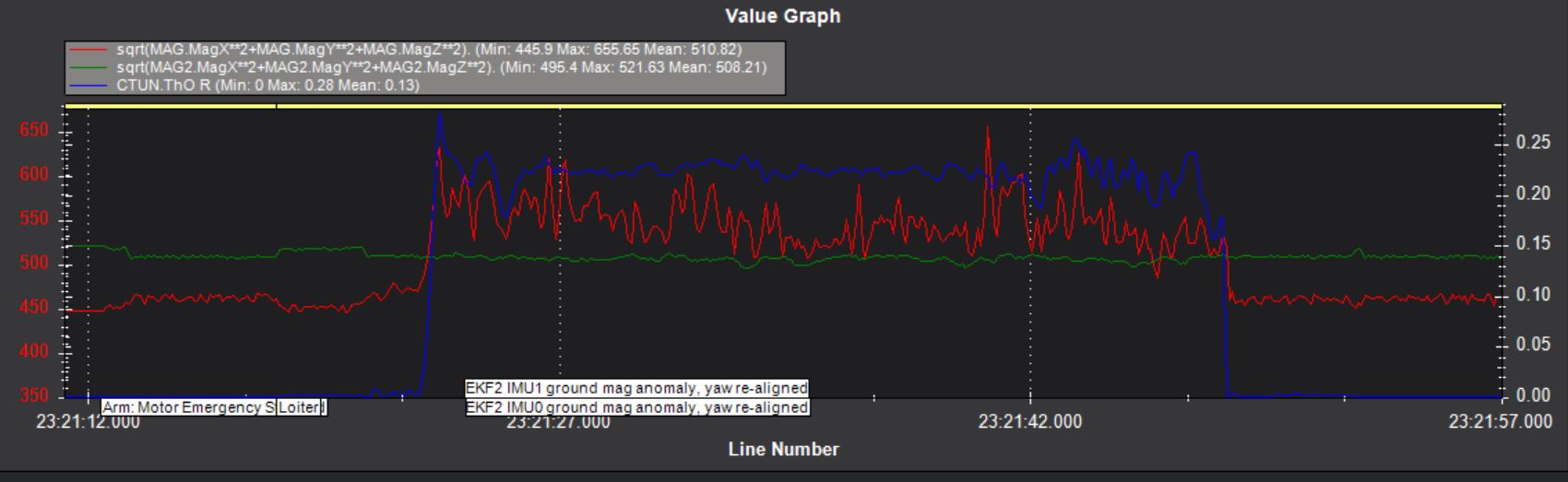
Mag 1 is responsive to throttle, Mag 2 is not. Causing Ground Mag Anomalies and Yaw re-alignment. I suppose this is the cause of the spike in Desired Yaw. Try re-prioritizing the compass’s.
Ricoman
July 8, 2021, 1:46am
4
Thank you for answer.
I remember this too, but I’m not sure how to fix it.
FC and GPS are Holybro Pixhawk4 sets
Thankyou
dkemxr
July 8, 2021, 1:59am
5
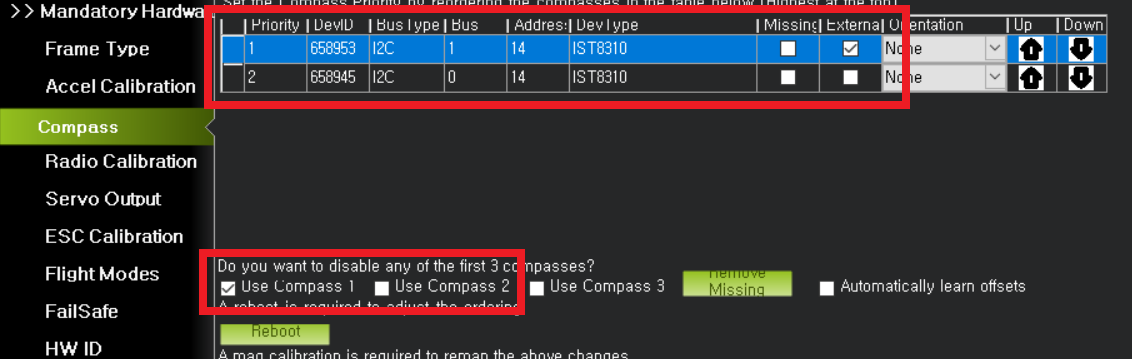
I did look at the parameter file. You have these 2 compass’s:
Both on the I2C bus so external.
You have this priority:
#1 is causing trouble #2 is not.
Post a screen shot the HW ID screen from Mission Planner to confirm.
Ricoman
July 8, 2021, 2:02am
7
Whoops… I guess I’ve already uploaded a parameter once.
COMPASS_PRIO1_ID,658945
Are you saying you can just change it like this?
ThankYou
Show me the compass page in the mandatory hardware Page.
dkemxr
July 8, 2021, 2:04am
9
No, change the compass priority on the Mandatory Hardware>Compass screen. Or just disable the problem one.
Ricoman
July 8, 2021, 2:10am
11
I have disabled #1 because compass#1 caused an abnormality.
After Hexa boots, the EKF in the Hud window turns red, and this has not been resolved after waiting for more than 10 minutes.
kalai1219
July 8, 2021, 2:29am
12
HWID 658953 is you external compass as of current configuration its second priority .make it priority one by clicking the UP arrow and reboot the flight controller.
And check for external compass appear on top of the table If so then redo the compass calibration outside after gps lock …then you good to go.
dkemxr
July 8, 2021, 2:29am
13
OK, the compass on I2C bus 0 is the Internal one on Pixhawk 4’s. Disable that. The screen shot shows it still active.If you just re-prioritize and the internal one is still active you can still have problems.
Hasn’t this all been covered before?
Ricoman
July 8, 2021, 2:33am
15
kalai1219 says to change only Priority, please check it once
Change Priority as kalai1219 said
Dave, as you said, disable the internal compass (now #2 )
Reboot
Compass Calibration
is this correct?
Thankyou
dkemxr
July 8, 2021, 2:35am
16
I would disable the internal compass. Sure, re-calibrate after doing so if you like but it’s not nessesary.
Ricoman
July 8, 2021, 2:40am
18
Even if I eventually disable the internal compass, should I change the Priority?
Additionally, after all, this isn’t a Pid issue, it’s all a GPS issue…
It’s a lot harder than i think
Thankyou
Ricoman
July 8, 2021, 3:03am
19
Compass Priority changed, #1 and #2 changed.
Disabled compass2 as you said.#1 and #2 . Now #2 is the old internal compass.)
Hud’s EKF does not change from red
GPS is also 3d dgps
kalai1219
July 8, 2021, 3:32am
20
Show gps hdop is below 1? And check message tap that EKF2 using GPS.
Ricoman
July 8, 2021, 3:40am
22
Hdop is 0.9
EKF2 Locking is cleared
but GPS status is 3d dgps not 3d fix
thank you
mlebret
July 8, 2021, 4:58am
23
3D DGPS is better than 3D Fix, as you received corrected data from GPS system.
Ricoman
July 13, 2021, 6:27am
24
long time no see.
I’m back to report.
Changed Compass Priority.#1 -> Internal:#2 )
Disable the internal compass
Reboot after performing compass calibration.
Fly
Result: The toilet pool phenomenon disappeared.
But is it safe to fly with only one external compass?
In fact, during the flight, Hexa flew by tilting her head slightly to the side rather than flying in a straight line.
Among Rtl, it deviated significantly once at all.
Binary loghttps://mega.nz/file/XwUE2B4B#hqZrk1-_3CLv0RzulKWLQBqFKF2HcEvGPH8uOBl4mt4
I’m sorry to have been troublesome
Please take a look at the log and let me know if there is anything I need to correct.
Ricoman
July 13, 2021, 6:28am
25
I’ve heard many stories that 3d dgps is better than 3d fix.
However, when in 3d dgps, the drone feels wobbly rather than powerful.