I am doing a project now in the initial stage the project is about the Coaxial Ducted Fan UAV want some guidance related to how to use mission planner and pixhawk and it work on that thing.
Did you start here:
https://ardupilot.org/copter/docs/singlecopter-and-coaxcopter.html
Yes i have seen it basically i am confused it in that Pixhawk implementation how to implement it in mission planner using this
Some confusion in this case as in my design there is Coaxial configuration and flaps , as there is no such configuration is Mission planner and have no such idea how to implement this.
But initially which firmware to choose from these for ducted fan UAV configuration having flaps at the bottom and Two rotors and where to select that frame class

You don’t select if from there. You go to the Full Parameter list and configure it. It’s not a common frame type, you will have some experimentation to do to get it flying.
2 Likes
I have seen the post in this the yawing motion is catered by flaps but in my case I have a two coaxial rotor and i want to do yaw by differential motor thrust by changing the thrust of two rotors how can i do this? Using Ardupilot
That case is supported in Coax Copter. Read the docs.
1 Like
Dear Dave
I want to ask about Pixhawk that it support which version of the ardupilot. As i have APM 2.8 and it not support 3.5 version of it.
Regards
Abdul
That board is obsolete and no longer supporeted. The last version supported was 3.2.1 from many years ago.
1 Like
Pixhawk support which version any idea? and specially Pixhawk 2.4.8
Pixhawks, including that version, support the latest Rev of Ardupilot. But there are many supported boards.
Thank you for your response
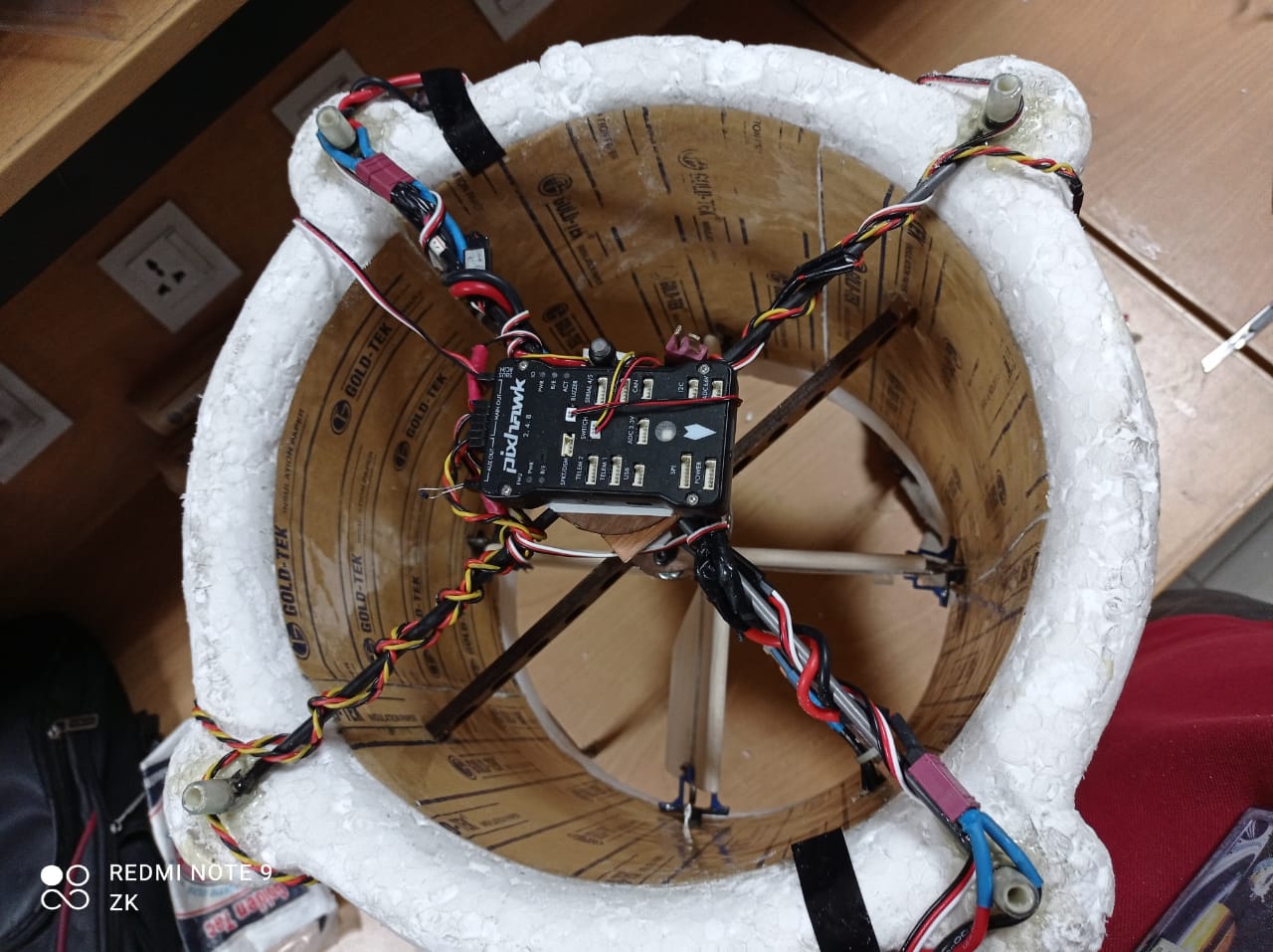
Well I am facing a problem with the test flights. as you can see that the drone is completed. but every time I try takeoff. it always topples to one side. I have labelled the sides with left and right, and I noticed it topples mostly to the left but log_25_UnknownDate.bin (369.3 KB) to the right. I tried to recalibrate mag and compass. and I even tried changing the stick movements of the transmitter, to check if they were giving opposite response. but it still didn’t help. so can you help me pin point the problem, as to what can be the issue. Log file is attached and video in the google drive is also attached……
https://drive.google.com/file/d/1szmLQm6yyG_34wD8hghWRWmrUA7uzSyU/view?usp=sharing
Regards
Abdul
In what orientation is the Flight Controller mounted? When connected to Mission Planner does it respond correctly in the HUD when you pitch and roll the craft by hand?
Did you follow the guidelines here for Testing the Flap movement?
https://ardupilot.org/copter/docs/singlecopter-and-coaxcopter.html
Are the CW and CCW props turning the right direction?
1 Like
Dear Dave
Yes i have checked all the things from the posts. followed all the guidelines even the first test flight seems to be successful i have attached a google drive link you can see from that and pictures of ducted fan also attached

You can see from video it is stabilizing but when we did second flight it topples as i had told you earlier
https://drive.google.com/file/d/1Q70ek8QPT6oQdgdMYSOsJmDjsQ1CgkVX/view?usp=sharing
Dear Dave,
Kindly check out this flight i have attached the video the link is in google drive kindly check this out. I have a question regarding this that it need auto tuning or not by visualizing it kindly check this out after many errors i got this successful flight @dkemxr
https://drive.google.com/file/d/1-zyOzm3JFcVsBmOcsN22tGHLKPrFJ6Hf/view?usp=sharing
Regards Abdul
Hi Abdul-It looks like it’s flying fairly well. But we would need a .bin flight log file to check tuning.
1 Like
Dear Dave
This is the flight log data i attached it @dkemxr
log_41_UnknownDate.bin (435.7 KB)