It looks like you have insufficient thrust for stable flight. Commanded motor output is at max most of the time and you have Thrust Loss errors.
1 Like
So its not problem of PID tuning ?

2 Likes
Dear Dave
Do you know what can be potential reason for the thrust loss?? first thing is that when i did the test i pushed the throttle stick to max, which was maintained for sometime but after some seconds it started to fall while the stick was still at max. so could this be related to the yaw correction due to differential thrust because the throttle stick was at max.?? @dkemxr
Regards
Abdul
I think the thrust/weight ratio is simply too low. The craft is too heavy for available thrust. Larger prop, higher voltage battery, less overall weight would be the optons.
2 Likes
Yep, would say the same thing as @dkemxr. Any further tuning will be useless (and dangerous for the copter) without more thrust (or less weight).
so could this be related to the yaw correction due to differential thrust because the throttle stick was at max.??
No, the single copter algo do not use differential rotation speed of the two props to rotate, you should customize the heli side of ardupilot to do that (can’t find the source for this claim, but I’m pretty sure a dev once said it in the forum). BUT, when rotating, your flaps get in the flow of the props and that is what momentarily reduces your thrust.
1 Like
Dear Lian
Its not single copter but a coaxial copter as it caters the differential thrust. @hubble14567
Yeah I know that it’s a Coax. I checked your log and there is indeed differential thrust on the Coax-Copter side of Ardupilot. I thought it was not the case, my bad.
1 Like
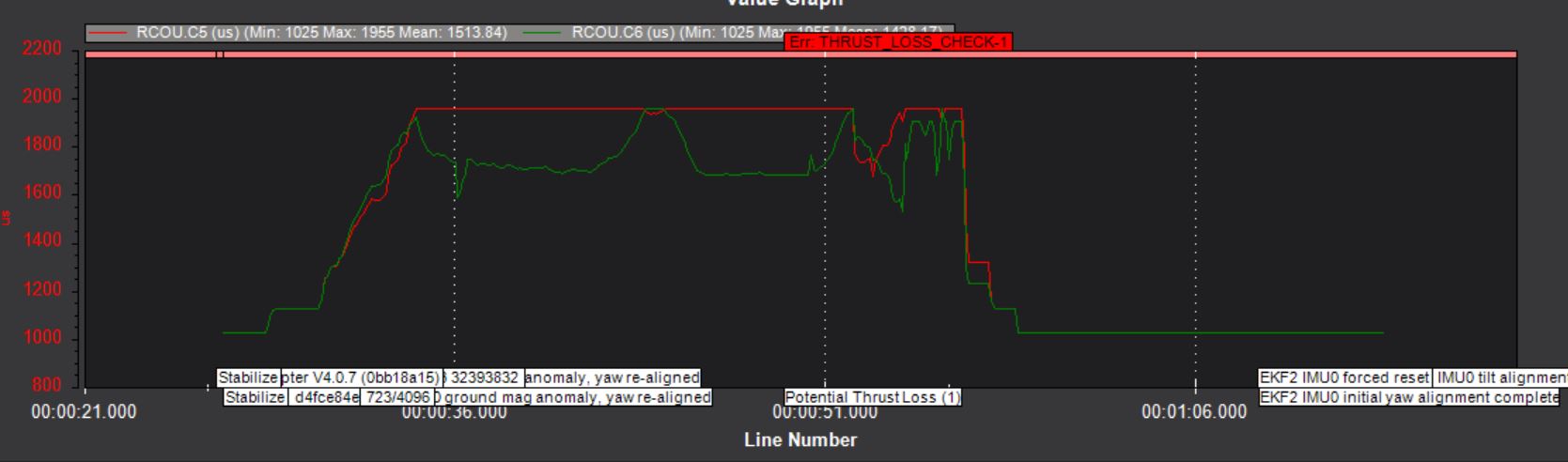
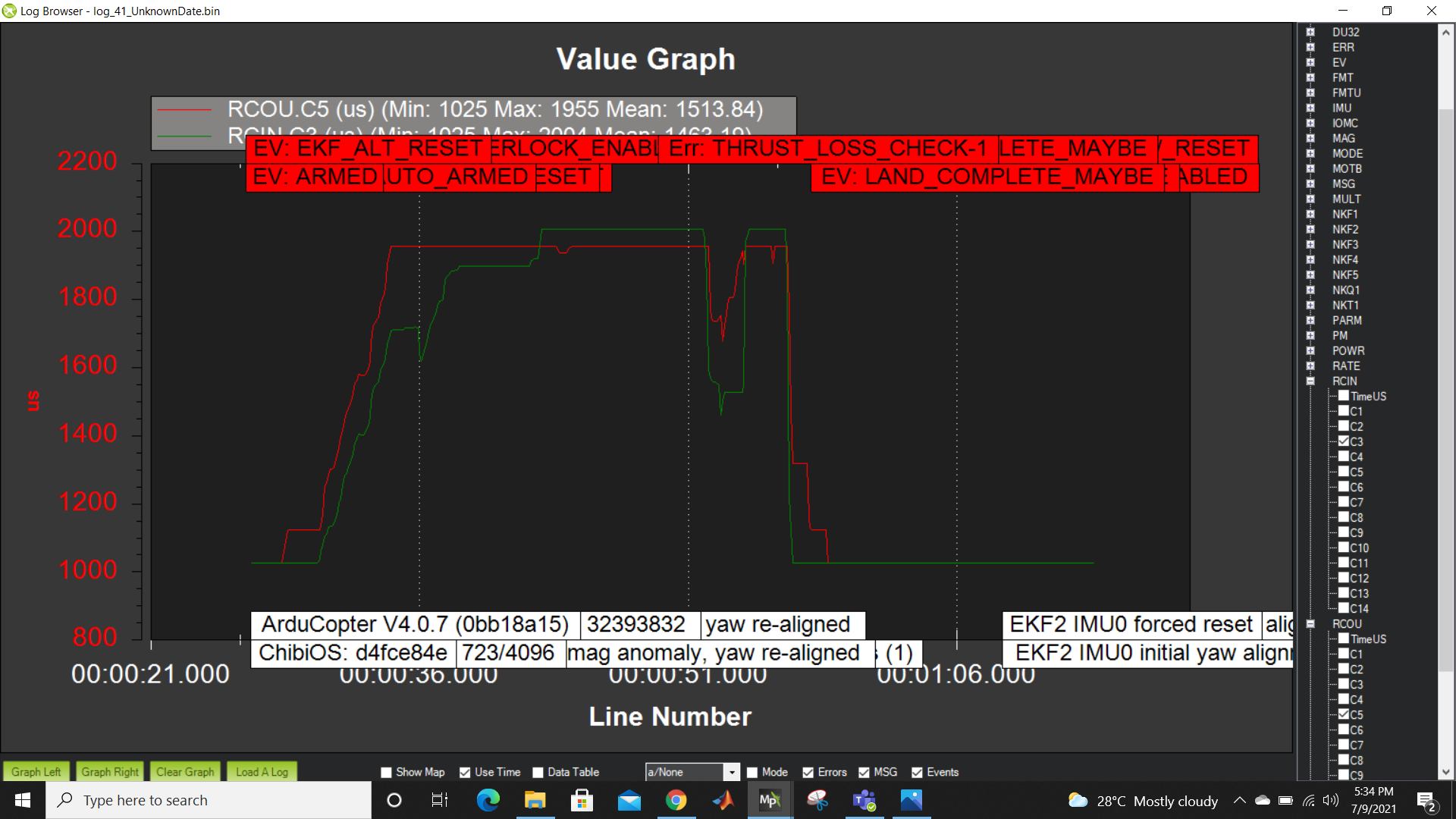
And it’s underpowered. Both commanded motor outputs shown here. Increase the thrust/weight ratio and then plot this for yourself. When the average outputs are ~1500us at hover it’s good.
1 Like
Dear Dave
I have attached a picture here you can see a green line which is of RC-IN channel 3. At about 51 seconds I didn’t change the stick input but the plot shows a dipped in the curve. so isn’t it possible that the connection between transmitter and receiver was lost at that time??? and that’s why RC OUT 5 thrust goes down ERR-THRUST? @dkemxr @hubble14567
If you are absolutely sure about the position of the stick, there could be an issue here. I don’t think it comes from a transmission problem though, this usually results in a sharp drop to below 1000us or no change. Maybe your stick has a problem idk.
Then, this would not have resulted in a ERR-THRUST_LOSS on a functioning copter. This error occurs because you don’t have enough thrust. I can’t say that lowering RC3 doesn’t make the error appear in your case, but the problem is that you don’t have enough thrust.
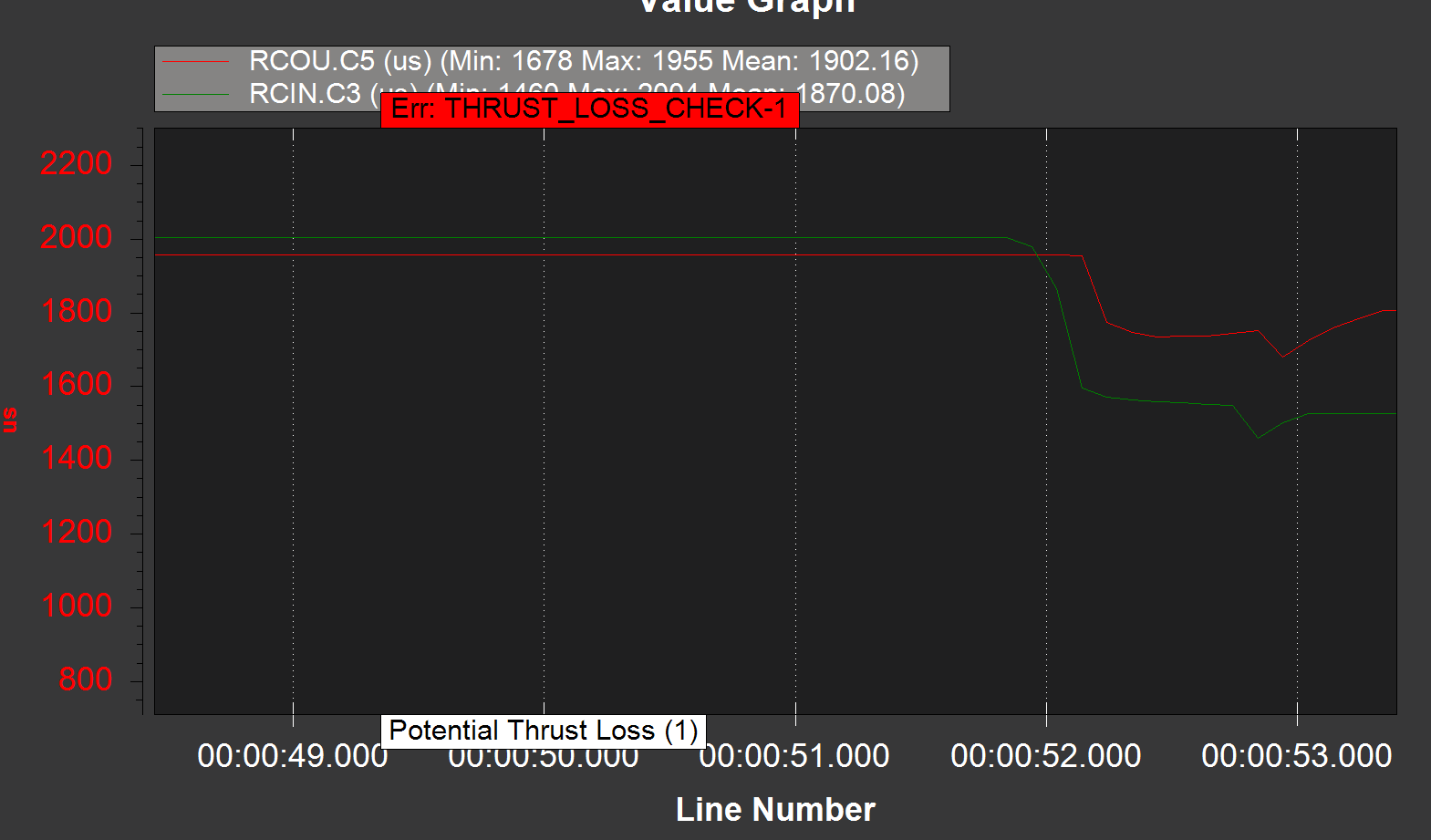
The dip in the curve is because you lowered the throttle. And as @hubble14567 points out the thrust error was before this.

YOU HAVE A LACK OF THRUST FOR THE WEIGHT OF THIS CRAFT.
I have nothing else to add, good luck with your coaxial copter.
I haven’t lowered the throttle in the entire flight then how this dip occurs? @dkemxr
but the problem is that you don’t have enough thrust.
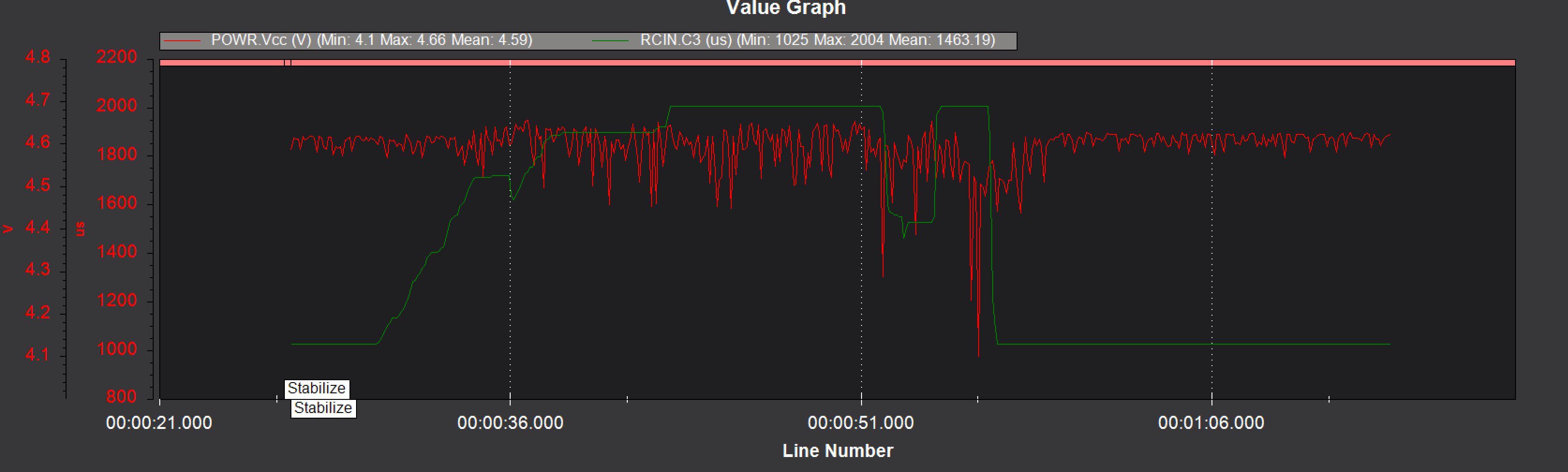
The Pixhawk Vcc is down to brown-out voltage, perhaps that’s why. Unfortunately you do not have battery logging so no way to tell if it’s from the Flight battery. How are you powering the Flight Controller?
You still have a lack of thrust. That needs to be addressed for this craft to fly properly.
2 Likes
we are actually powering it from secondary terminal with help of ESC, and using the zener diode. @dkemxr
Well, it’s not working well. You should use a power module.
1 Like
Thank you for you time your suggestions helps a lot
@dkemxr @hubble14567