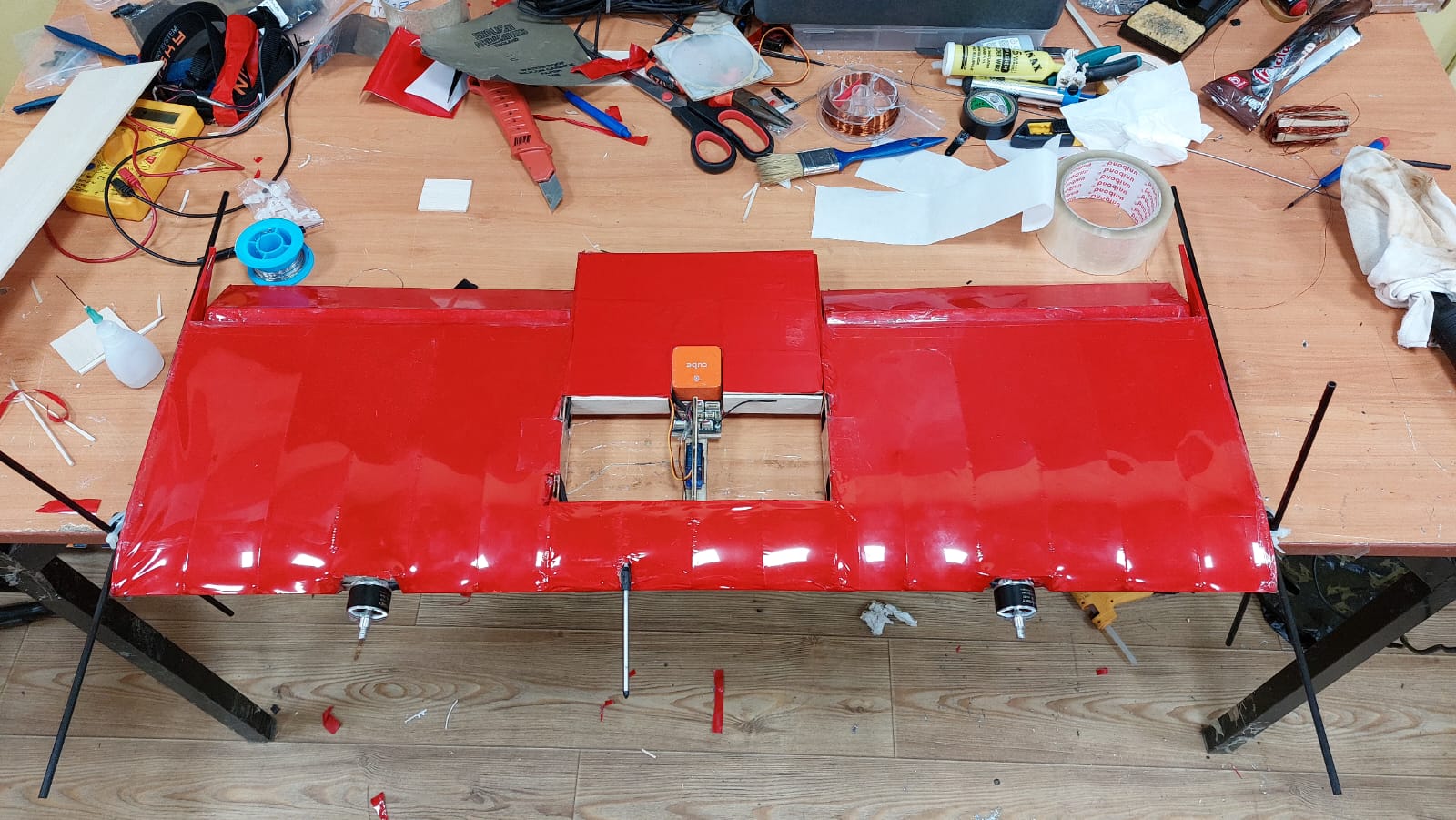
Hi, i am trying to set up my non-vectored dualmotor tailsitter. I have tried several first flights in QHOVER mode. Mostly i have problem with my elevons. I have followed the ardupilot documentation about servo functions. But still i can not be sure of some parameters. Especially Q_TAILSIT_INPUT. What parameters would be right for kind of a tailsitter of mine? I would appreciate if you could share a complete parameter list. You can see my list and the photo of my vehicle below. Thank you.
Dualmotor-nonvectored-tailsitter-params.param (20.3 KB)
I see you have set Q_TAILSIT_INPUT =1, so you control as a plane hovering nose up during hover. Aileron input on TX will roll the plane. If you set 0, the plane will swing nose to yaw direction. Bit 1 will change mixing earth frame to body frame. It will help to fly it better at higher lean angle once tuned. Sometimes document or wiki is hard to understand. It help to refer both descriptions of wiki and complete parameter list.
https://ardupilot.org/plane/docs/guide-tailsitter.html#tailsitter-input
https://ardupilot.org/plane/docs/parameters.html#q-tailsit-input-tailsitter-input-type-bitmask
You should follow tailsitter tuning steps. It is updated recently and clear. Quick Tune LUA applet will help to tune well after you set FF value manually.
Once tuned well, you want to make transition but I guess you may end up spiral due to lack of vertical fin/yaw stability, better to set plane parameter in advance.
There are many tuning points. My Eclipson E VTOL thread may help how newbie learns to tune.
Thank you so much for your response. I did a successful flight with QLOITER. However, after a day later when I tried, the trim values I’ve put manually were changed. What do you think could have happened suddenly?
I appreciate the help. Thanks again.
Which trim value parameter in exact?