You have elevon servo on the same output group (1-4) than throttle, so elevon servos are running at 400hz. Try to move elevon servo to an other output group, 5-6 or 7-8.
1 Like
Thanks for the suggestion
Will try that
Regards
I’m back to continue with my vectored Tailsitter Skywalker 6 after a “short” trip to Copter Tailsitter.
I flashed the new Plane FW 4.0.5 and modified the Outputs for the BLHeli32 ESC’s as used in the Tri Tilt Tailsitter with Version 3.9.8
But a great surprise with this setup described here:
Fortunatly discovered in the Rack. So I went back to 3.9.8 and everything OK.
Next: Test in the field.
Even back to the Version 3.9.8 not verry happy with the performance compared with the early setup and Version 3.9.2 without ChibiOS.
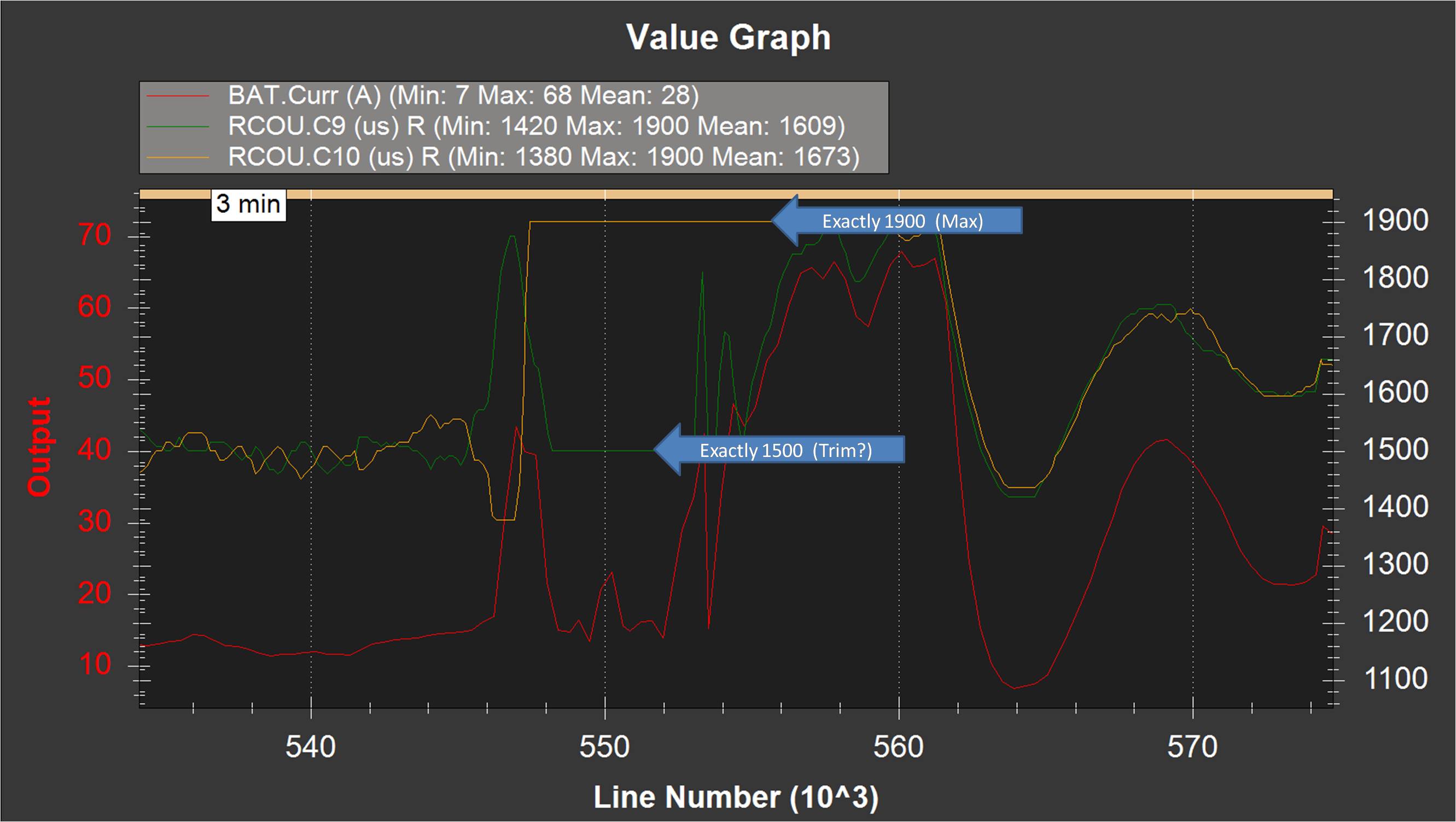
QHover not stable with the same Params and nearly a crash with strange behavior of RCOU9/10 for the Mots.(BLHeli32 ESC’s and DShot150)
Video: https://youtu.be/c6VeOfRRTCU
Log: https://drive.google.com/open?id=1jzTWXbyMloUfPloC_LcMQe4dSTwS8vHZ
Parameter: https://drive.google.com/open?id=1PJQtnpEB41bTNCZL__mTLvk8xQmpnlU3
Hi Iosawing,
I have been reading the almost 2000 post all week >> Very interesting all your contributions. 
I don´t understand this reasoning. Could you explain it with a drawing?
I understand the CG and NP position but not measuring it behind the propeller wash.
Excuse me my english
With this program you can calculate the CG/NP https://www.ecalc.ch/cgcalc.php
Congratulation for reading the whole thread, I hope it will be useful and we will see a video of your built.
I am very bad at using any kind of tool for drawing.
As a plane stability condition is aircraft CG in front of wing neutral point and the static margin should be at least 3 to 5 % if you use a stable Cm airfoil like PW51 or JWl65 and probably more with older Eppler positive Cm airfoil.
As a tailsitter, only a section of the wing is behind propellers and is flying. I believe that a wing design that put the NP of this wing section close to the aircraft CG gives a higher pitch authority. In other word the wing outline (together with propellers position) is a parameter you can adjust in order to have 2 different positions of NP as a plane and as a tailsitter.
If you are interested in non vectored dual motor tailsitter keep also in mind you will need large propellers, larges control surfaces about 1/3 of wing surface and fast accurate servos.
cheers from a Biscay bay neighbors.
hi Otto,
I had a look at your log and did not found something bad. From the video it seems your wing overshoot the demanded pitch and went upside-down  No idea why !! maybe servo speed or not enough dampening gain. On the other hand the vectored thrust did a very good job.
No idea why !! maybe servo speed or not enough dampening gain. On the other hand the vectored thrust did a very good job. 
chibios is OK for me but I am still stuck with classical pwm for ESC control.
Thank you, but I don’t quite understand the reasoning you are making. Well I will continue reading and studying.
By the way, I understand that you live in Bizkaia? If so, it will be a good reason to share experiences with a good cold beer.
Thanks for analizing. For me, the RCOU9 stucked several seconds at exactly 1500. But usually it moves around to control the wing. RCOU10 is also exactly at the same value (1900) but perhaps due to the limit.
The phyical build is the same as it was before the change to a Tri-Tilt, exept the BL Heli ESC,'s… With FW V 3.9.2 (without ChibiOS) the performance was perfect for about 20 flights. May be a reverse enginering can help to regain trust.
@lorbass I’m still looking for bugs in the tailsitter elevon controls. I did observe them both stuck at max up during a portion of one run, but unfortunately, I can’t find it in the logs. I believe I was running 4.0.5 at the time, but due to a problem with SITL in 4.0.5, I’ll continue the bugsearch in master.
Verry kind of you, to work about this issue.
Where did you observe it?
In the meantime I made a side trip to test the Fimi Palm Cam on a Hexacopter.

The target is to mount Fimi on the Dual Mot Tailsitter instead of the Gopro in order to profit of the gimbal stability.
Both elevons were deflected full up in qhover with the nose and motors pointed straight up.
But they started behaving normally afterward. This is obviously not the same behavior that you observed, but it makes me wonder whether we might have some sort of intermittent malfunction occurring. Of course it could have just been a bad build; I was switching back and forth between 3.9 and 4.0 builds at the time. I’ll spend some simulator time on master with several different RF8 tailsitter models to see if it shows up again.
How fast are the tilt servos on your TVBS Skywalker? I noticed the SkyCat RealFlight model has extremely fast tilt servos: 60 degrees in .01 second. I doubt that is accurate for the actual tilt rate.
It will be interesting to see how the Fimi gimbal handles transitions.
I use these servos with 6V. https://www.banggood.com/DSServo-RDS3115MG-15KG-Large-Torque-180-Degree-Biaxial-Digital-Servo-for-RC-Robot-p-1078758.html?rmmds=search&cur_warehouse=CN
I changed long ago to this Brand because of 3 defective Hitec Servos.
They work really good, without “mechanical gap” as seen with the HiTec. HiTec has ballbearings, Metal Gears but thin axels which made gaps in the plastic housing.
I’ve changed the tilt servo speed for the SkyCat to .14 seconds, which is the spec for the RDS3115.
Does the SkyCat fly OK for you in RealFlight/SITL on master?
And did you create it to simulate the Skywalker 6?
It’s behaving very inconsistently for me in RF8, but my Convergence-based TVBS is working fairly well.
Looking for the ideal airfoil for one non-vector tailsitterI dont´t see with enough reflex (PW-75) In your opinion, what could be a good option? The reflex curvature should be kept on the marginal edge?
Because I had the real Wing, I did not work with SkyCat or Skywalker 6 in SITL.
And now, no chance to get SITL working again, even not with the perfect flying copter-Tailsitter. In RF8 it connects to FlightAxis, but the controls reacts completely wrong. At the moment, not enoughe time, to fight with this.
After replacing the HiTech Servos to the RDS3115, the Params didn’t work as you can see here:

But after modifying Q_A_RAT_PIT_P from 0.2 to 0.15, and Q_A_RAT_PIT_D from 0.007 to 0.005 it behaved good. (Right Tilt gauge, red needle doesn’t move because of an error in Dashware)
The Speed of the HiTech Servos where 0.12 sec/60°, of the RDS3115 it is 0.14s/60°. But RDS3115 have 3 times more torque.
JWL-065 is an airfoil I used in several tailsitter aircraft with success.
I think PW 51 or PW75 might be very good too. For a flying wing Cm has to be around 0 or positive but Cm is not a constant (as it it is theoretically supposed to be). For plane stability, the most important is the curve Cm/alpha. The lower variation the better. http://airfoiltools.com/airfoil/details?airfoil=pw75-pw. (The link shows a very limited variation which is good). So you you can set the CG close to the quarter mean cord and reduce the static margin in the range 3-5% which should give in turn a stable hover mode. So stable as a plane and as a tailsitter at the same time.
About pitching moment of a flying wing, there are only 3 parameters in the equation: airfoil itself through Cm, CG position and elevon deflection.
I am not from Bizkaia, I am about 50Km south of Bordeaux but still very close to golf de Gascogne.
impressive footage, no vibration and stable. Very cool idea for a tailsitter.
About your skywalker 6 almost crash, is the most probable option a bug in the tailsitter code related to the use of auxiliary output ?
Yes, thats also my feeling. In above flight I used Out 5/6 for Mot1/2 and standard ESC’s. But with the same wing as Tilt-Tri no such issues apeared during about 25 flights and aux out 9,10 and 11 with the BLHeli32 ESC’s. I wanted ESC Telemetry and learned, that for Pixhawk 1 the Aux Outs must be used. http://ardupilot.org/plane/docs/common-dshot.html?highlight=esc
May be I should go back to Out5/6 with standard ESC’s again and give up with Telemetry.