Yes, I tried to reproduce glitches with the Oscilloscope on the Servo Signal Line only at Pixhawk with Trigger On.
But no succes also. I remember sometimes ago I heard (didn’t look at the servos) one hard, short noise from the Servos after pressing “Clear all Logs” in the Log downloader of MP.
This happened not every time. I don’t remember if the Pixhawk was powered via the Powermodul also.
I can’t analize the FW or Hw more in detail. Therefore I change the servos and will disconnect it for reading
the logs and clear all logs. Not verry comfortable.
But there may be another reason for the failures.
When I bought the first two servos, I tryed to programm the 180° travel with the Programmer Hitec DPD-11
as I did it with the servos of the smaller wing.
After connecting it to the programmer, they didn’t react anymore.
The dealer informed me, that these servos needs another programmer because of an older protocol.
And the DPD-11 has shoot down the Servo FW. I had to buy again a Programmer. (HFP-30 for 100$)
In the specs was nothing to read about. The dealer replaced the 2 servos free of charge.
And now, may be that the gliches makes the same issue. (Never with the Elevon servos of another Brand)
How are you providing power to the servos? In my setups, there is no power to the servos when the controller is powered via USB, servo power is sourced only from the flight battery.
I think there have also been some reports of servos going bad due to being run at too higher pwm rate. This would happen if they were connected to the same output group as a motor set to a higher pwm rate or dshot. I think…
@losawing Do you think QSTABILIZE (for quad tailsitters) should use SPIN_MIN as the minimum throttle setting? I crashed at the beginning of my last test flight (on the flight-test-3 binary) because I throttled back while pitched down, but then raised the nose without adding enough power.
The Servos are powered by a 6V BEC via the Power rail of the Pixhawk.
Yes, at this power rail is no voltage if the Pixhawk is powered via USB.
The servo fail happened when the battery is not connected while reading the the log via USB.
(or Power OFF after a good landing or ON bevor flying)
But not every time.
The Servos are connected: Elevons Servos Output 1, 2, Tilt Servos Output 3,4, Motors 5,6.
I measured the frequency at Output 3,4 with 49.5 Hz. (Oscilloscope)
The German representant of Hitec confirmed: All Hitec Servos would work up to 500 Hz.
Since it seems likely that a failure could not occur without 6V power applied to the servos, we should look for problems during boot and initialization. But the worst thing that could happen on the signal line is bad PWM timing, and that should never damage a servo over such a short interval, powered or unpowered.
Is there a chance that there is a (over-voltage) transient coming from the BEC when the battery is connected or disconnected?
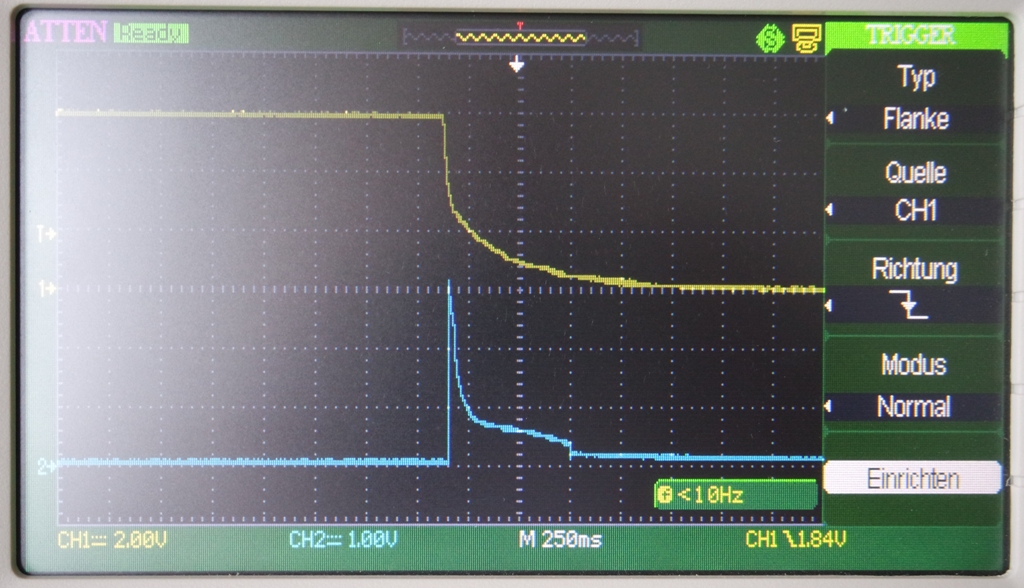
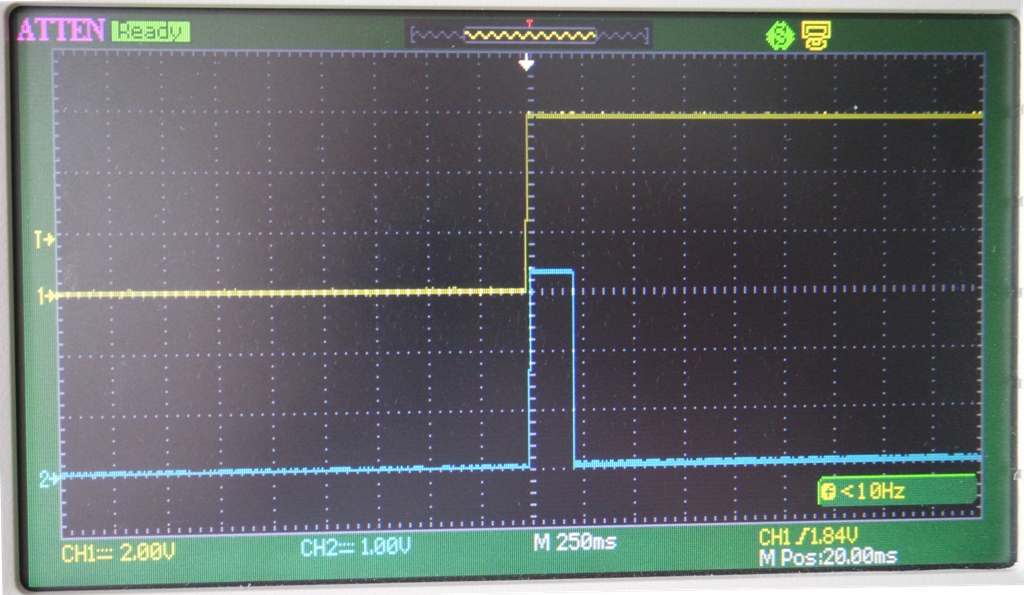
Below the pics of the Voltage on the Output 3 and Power Rail at Power On / Off via the Battery and BEC.
Yellow Power Rail Plus (6V, 2V/cm), Blue the Servo Signal (3.3 V, (1V/cm)
When the safety switch is pressed, blue shows a signal with 1500 us at 59.5 Hz.
The same when powered via USB exept the yellow line at zero.
May be the 240 ms Pulse at power ON damage the servo when no Power on servo rail.
No other glitches or spikes.
By the way. The other Tilt servo and the Hitec Elevon Servos (HS 5070 MH) works
Regards, Otto
I don’t see any problems with the 6V power there, and I don’t think it’s reasonable that a servo should be damaged by a 3.3V logic input with no power applied. So I’d blame the servo; probably a failure in its motor drive circuitry that occurs on power-up.
This is OK and less confusing. But the Q_tailsit_rll_mx seems to be disabled when flying q_hover.
I still have a better feeling with acro_locking=0 but this is just because the locking eventually lock attitude that the aircraft can not fly if throttle management is not very good.
What do you call glitch ? There are only two things that could be improved:
In q_hover mode, when rolling the wing (plane frame), there can be some stop and go in the roll rate if q_yaw_rate_max is superior to what the frame can achieve. But this is really nothing !
In qacro mode there is tendency when a fast rate is required to continue to roll or pitch after the stick are released.
Thanks, I’m glad we’re making progress. It turns out Q_tailsit_rll_mx was broken by an unrelated change to master. @iampete has submitted a fix for that.
By “glitch” I meant that the attitude controller was allowing the attitude error to grow very large; it now limits the error to 30 degrees by reducing the rate demand as necessary.
If your plane is capable of meeting the ACRO_ROLL/PITCH/YAW_RATE values, and is trimmed well, I expect ACRO_LOCKING=1 and 0 to feel the same, except in the case you point out. We might decide to eliminate ACRO_LOCKING=1 if it has no real benefits.
I am very interested in code which support quad tailsitter
without elevons and servos.It will be so nice from you, if you
may try to help with that.I will use this code to make test fly.
sincerely
N.V.
I’m not sure what one could do to make such an airframe fly well. Perhaps someone else here has some thoughts on the feasibility of eliminating control surfaces?
I have big experience in plank flying wing with two motors without control surfaces.
Definitly it can fly O.K.
With 4 motors it will be very stable.
Here is my two models six years ago.
It was April 2011,but I have all details in book.
Roll -diferential thrust, pitch up-more throttle, pitch down- less throttle
Airfoil SD7037 modified
CG is critical point for plank flying wing.If you made mistake for 1cm -crash
For Plank2 CG is 5cm from leading edge !
Sincerely
N.V.
@losawing I discovered that some of the weird throttle behavior in stabilized modes is due to the “angle_boost” function, which is supposed to boost throttle to compensate for tilt angle in multicopters. But it also reduces the throttle down to zero as tilt angle goes from 60 to 90 degrees. You can disable it by setting parameter Q_A_ANGLE_BOOST to zero. This shouldn’t affect QACRO mode, since it doesn’t use that function.