The copter tailsitter frames assume that you have elevons, as they are mandatory for roll control in a copter tailsitter. Your best option is to set it up as a normal quadcopter and use only copter flight modes. ACRO should be fun; I’ve done this by tacking a wing onto a racing quad.
Hi
I already made test fly as Copter in Stabilize mode.
Everything was O.K. when it go up.
When I lower throttle to go down, copter turn down with strange oscillations.
First time I recover it with more throttle but second time - crash.
What’s happened.
Is C.G. problem ?
It’s 8cm from leading edge.(dimensions of wing= 180x40cm with wingtips)
This is dataflash:2019-04-06 12-45-03.bin (940 KB)
It’s not going to be stable flying backwards unless you keep it slow. You can raise SPIN_MIN to keep the descent rate from getting too high in stabilize, but altitude hold mode will be a lot safer; there should be a parameter to set the max descent rate somewhere…
CG around 20% of wing cord sounds good.
Log shows that oscillations are mainly with roll. I would try to increase rate roll P and D until you can hear motors oscillating rapidly. You design is not symmetrical, so pitch and roll rates should be very different.
About the wing design, I would begin with a much smaller wing and would place wing motors near the wing tip.
There is a strange behavior of wing motors when making an outside loop

Bottom motor is limited by spin min and top motor is at spin max so OK for them but wing motors output is reduced despite throttle is almost maximum. This behavior explain why the wing hardly complete the loop.
My wing is now the perfect park flyer, hover like an helicopter and fly like a 3D plane. Thanks again for the qacro mode. I make around 2 flights a day to train myself, I have set q_yaw_rate_max to 360 and hardly trying to make a ‘side loop’ from hover to hover attitude, not yet succeed…
@losawing Thanks again for all the flight testing, and it’s great that copter tailsitters are a fun aerobatic addition to the ArduPilot stable.
Here’s a new set of binaries which should fix that throttle issue.
flight-test-3
This build also has a new throttle curve for qstabilize and qacro which should reduce sensitivity around hover. There’s also a new parameter called Q_THROTTLE_EXPO which defaults to 0.2. Valid range is [0,1] with 0 being min expo and 1 max.
Another new parameter is ACRO_YAW_RATE (instead of q_yaw_rate_max) to set the max yaw (body-frame roll) rate in QACRO mode. You’ll want to change it to 360 to match your current settings. q_yaw_rate_max is used in auto modes (and weathervaning), so you probably want to put it back at the default of 90 deg/sec.
This also has an improvement to the ACRO_LOCKING=1 behavior; it shouldn’t glitch anymore, and should be more “locked in” than ACRO_LOCKING=0. I’ll need to add a new parameter for that too, since the fixed-wing acro mode uses it for a different purpose.
Some news from an “old fashioned” vectored Bellysitter…
Do you think the load on the tilt servos is greater than would be typical for this type of servo? It would be useful to measure the current draw in-flight.
Thanks for the input. Will do it with the new servos. (analog input of Pixhawk)
Thats a good question because difficult to judge.
Therefore I made tests at the beginning.
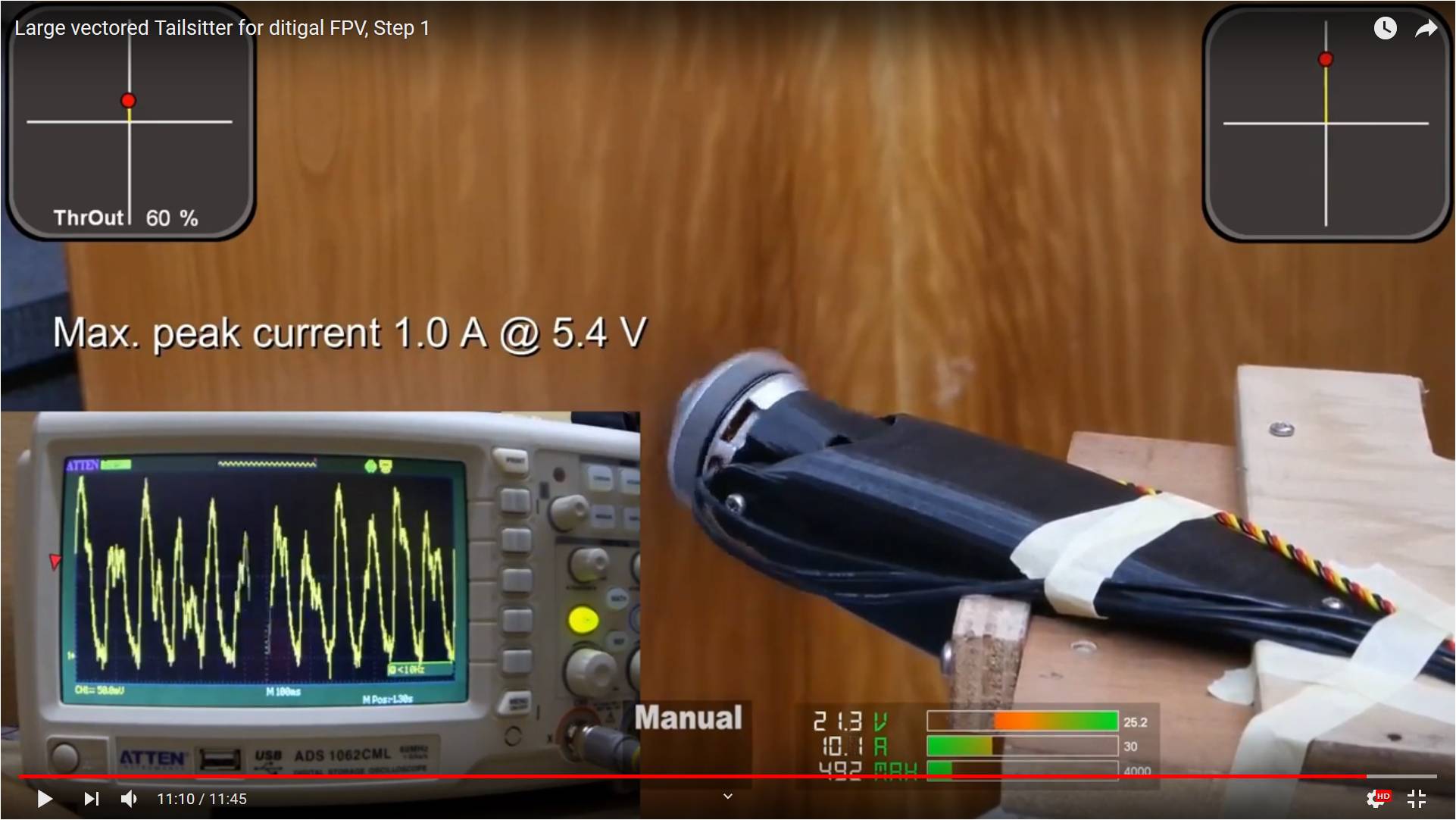
In the video at 11 min 45 sec. or in the piks you see the result while moving fast the Tilt
at full speed of the Prop which is higher than in the flight.
In the data sheet are:
Current drain idle 3 mA, no load 230 mA, Stall Torque 5.5 kg.cm @ 6V
But the max Stall Torque on the bench was 3.15 kgcm only at 1.1 A. So the data of Hitec are wrong.
A max current is not mentionned in the data sheet.
1 Like
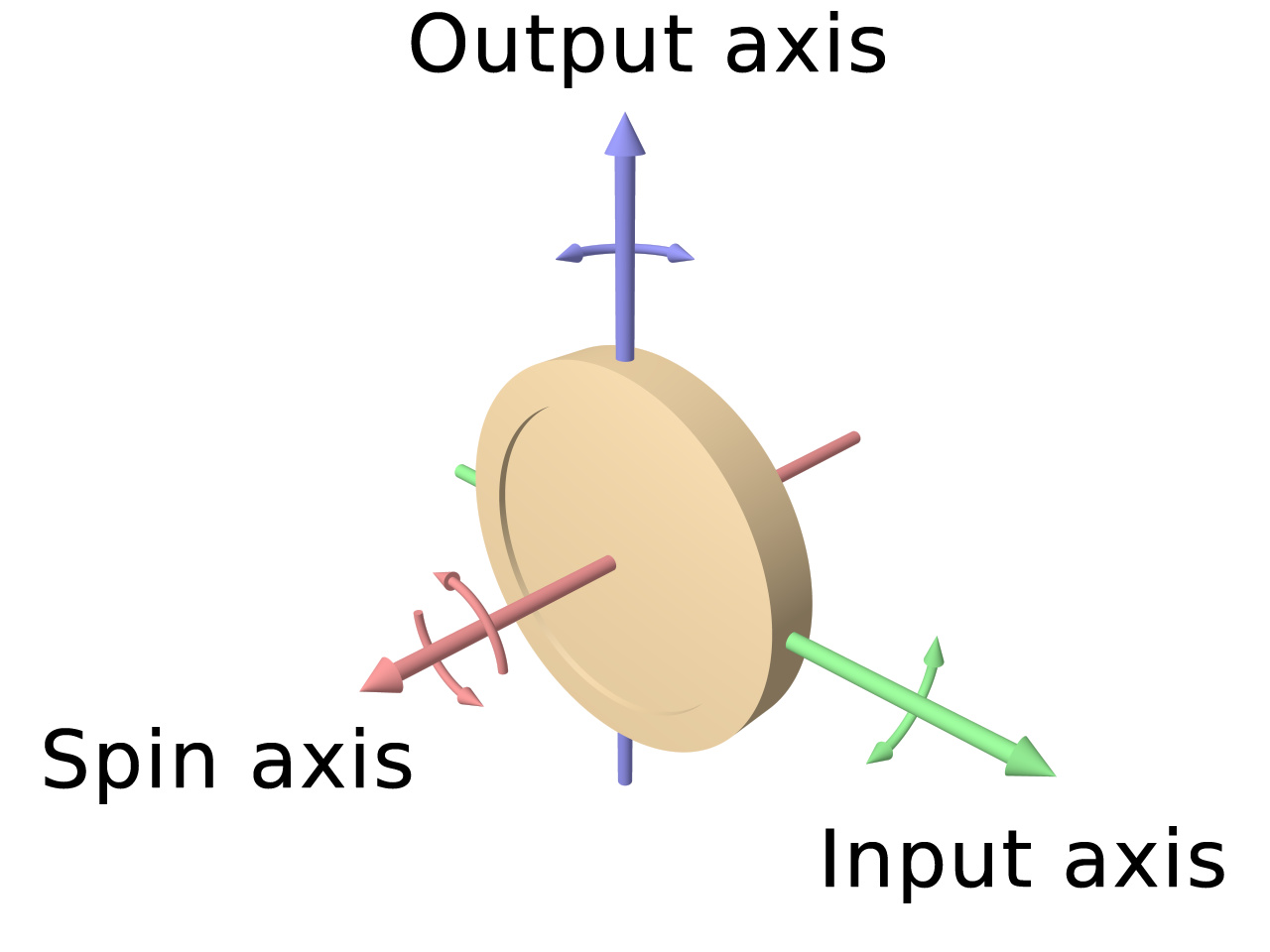
I looked into this quite bit last year. When it is held still like that your not getting the gyroscopic forces on your servo. They would be acting in the other axis, plane frame yaw when tilted forwards. gyroscopic forces act on the servos when your plane moves in plane frame yaw (milti copter frame roll). This is the pic from wiki. So in the hover a plane frame yaw torque acts against the servo.
Very hard to predict the forces tho. My tvbs goes through tilt servos at almost one per flight. Although your mechanism does a very good job of limiting the loads.
Yes, thats why I made a test with running motor.
In the meantime I ordered a INA169 Analog DC Current Sensor (10$)
And amazing, in the US (Adafruit) the cheapest freigth cost 36$ to Switzerland compared with China free of charge.
But luckely here is a dealer.
And we will see the current in the Log.
FlyTest2
Is anybody know what is wrong here?
Fly start with Stabilize, than AltHold, finally Acro and Crash.
Now Roll P=0,299 (max!)
In AltHold is possible horizontal flight but little by little start strange oscillations.(Why?)
Roll D =?
Hi, Lorbass
I’m still using hyperon servos with very little problems,
just saying
https://hyperion-world.com/
Thanks for the video.
Dihedral wing tips makes an interaction between yaw and roll and it seems to me the flight controller does not cope very well with this.
If you go to the full parameter list you will be allowed to enter the value you want.
Tuning PID takes hours and I dont know if copter autotune will work in your case. My manual method is to start with a low D value then increase P until oscillations, reduce P by 30%, then increase D until oscillations, reduce D by 30 %, increase P again as much as possible.
from your description I think your servo failed when piwhawk was powered through the USB. It is very unlikely the failure happened right after the landing or during the initialization.
I know I have randomly glitches sent to servos when my pixhawk is powered through USB. Right now, I am wondering if glitches occurrence depends on the computer I use, it could be… Maybe the USB signal is not clean.
A good info, thanks.
So you will say, the signal input of the servo would be damaged by glitches?
An indication could be, its the same servo as last time.
The power rail is not powered via the USB and zero Voltage. May be, the gliche-current supply via the signal
Input of the servo the power rail to the other servos.(Protection diod)
I have the suitable programmer for this Servo, and can readout its params and they are correct.
I had the same suspicion, but when I measured the Pixhawk Output I did not see any signal on
Power or Signal Line. But of course, I didn’t look for a long time and glitches are short.
But anyway, I will power the pixhawk via the normal input for the next Log readout.
I did it not, because it was safer when the motors where not powered, even with safty switch off.
You say: “I would try to increase rate roll P and D until you hear motors oscillations rapidly”
Is it on fly or on bench.
Please, how you make this?
I saw servo short movements when my pixhawk was powered by the USB only. I know this is weird and I tried to reproduce it yesterday evening and this evening without success.
Did you tried to use the trigger to capture a shot event on both servo signal and 5V wire ?
When the aircraft is already flyable I make the tuning with altitude hold mode just twitching all axis and looking at the reaction. But beware I am now flying only arduplane, there are several years I haven’t used and tuned an arducopter aircraft. I broke some propellers too
. 