Mine from amazon only had 60° altough it said 180 degree in the description. Testet vom 800 to 2200us. What are the settings for getting full 180 degree? They are called “LewanSoul LDX-218 Full Metal Gear Standard Digital Servo with 17kg High Torque Dual Ball Bearing for Robot (Control Angle 180)”. Was it my mistake or do they really only have 60 degree?
I did not order the longrunner servos because they have really bad reviews.
But also need new motors for going on. They should have exactly the same thrust. The different thrust causes a lot of problems. Flight behaviour in forward flight is really bad. The difference my motors have seems to be more than just manufacturing tolerances. Which ones could be a good and cheap replacement for my Turnigy L3010B-1300 Brushless Motor (420w)?
Maybe Sunnysky X2216 with 1250 or 1400kV for 3s battery? Both versions are in stock at banggood. All larger Sunnysky motors are much more expensive.
You have to set pwm from 500 to 2500 and you will get 180° travel. To set pwm outside the normal range you have to go to full parameter list and look for servoxxx. With mission planer, when you try to set a parameter outside the specified range, your modification is not active until you modify an other parameter. I have 3 aircrafts with tilt motor working without problem.
I use sunnysky 2212 1400KV with 3s an 10x5 graupner eprop on a dual motor tailsitter. The maximum tested weight of this setup is 1.6Kg.
When I have only 60° from 800 to 2200 how can I have 180° from 500 to 2500?
So you fly your 1.6kg wing only with ~300W motors? Interesting! I have maximum current of 80A at 12V so about 500Watts per motor. Even with that setup every second transition back to horizontal flight fails. I thought I need more powerful motors. But maybe these problems will be gone with thrust vectoring.
Just to compare.
My Wing weigth 2.6 kg
The mots:
Quanum MT4108-580 with Prop 11x5.5 und Battery 6S
On the thrust stand measured:
10 A at 1200 gr
28 A at 2300 gr
And on reality you can see the power needed in the videos.
Will prepare the files for download soon and post it when ready.
Also needed the template and profil files.
In the meantime read all this:
Dashware Homepage http://www.dashware.net/dashware-download/
Dashware Profile
@rollys
You will find all files here: https://drive.google.com/open?id=1D-Io2B1CXHQKMgI2tBleE_siFnjucY94
May be, it needs only to copy the Folder Skywalker into the directory Dashware\Templates
And the file Skywalker 2.xml into the directory Dashware\DataProfiles.
Else you can import the gauges via Dashware.
Have fun.
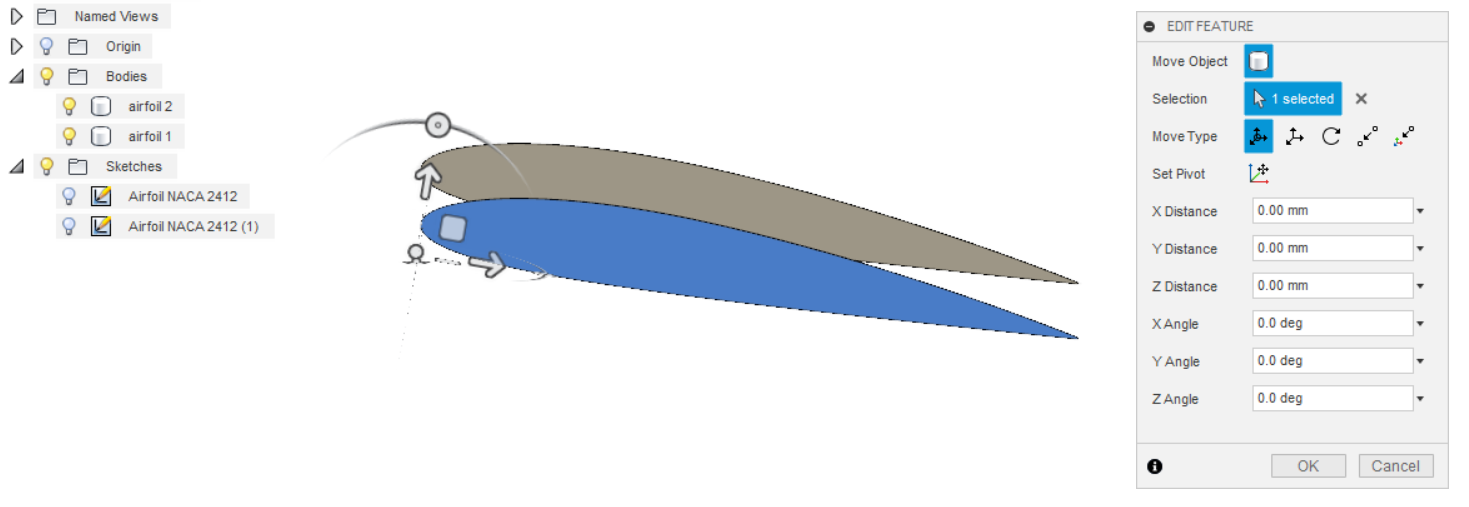
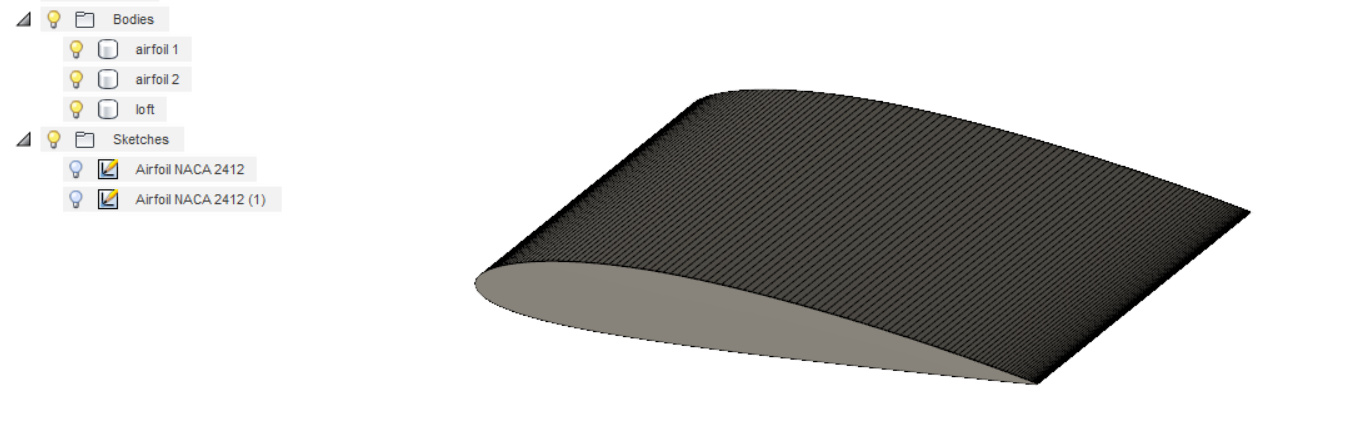
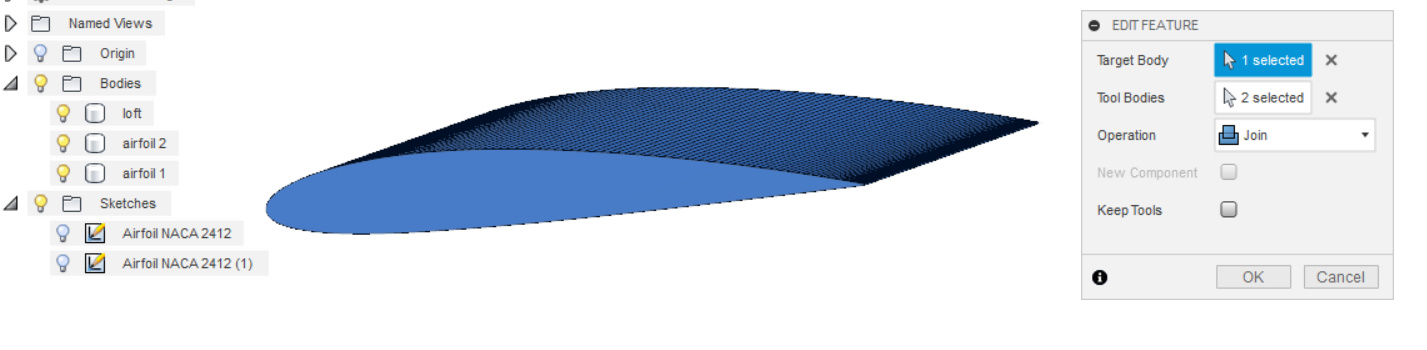
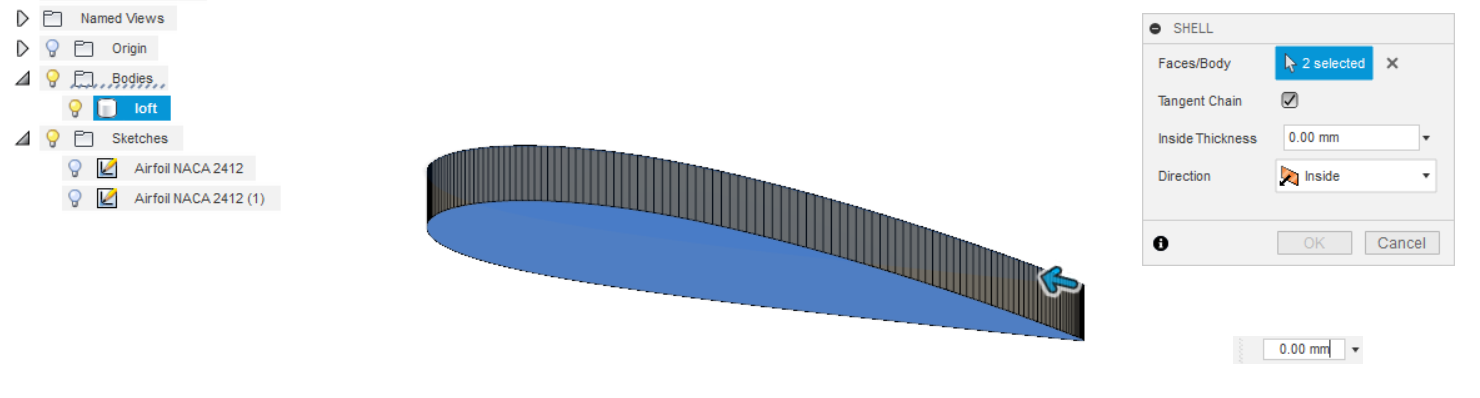
How are yall creating models to wrap around the airfoil in the 3D CAD software? I have a wing created by doing a loft between the two airfoils. After this I don’t know how to work with the curved surface to create an object flush with the leading edge of the wing.
I assume you have a solid lofted body. I make mine from the Airfoil tool and are not splines so these sketches will need scaling to size and pulled to bodies of some thickness and moved to the desired span :
Hi Otto,
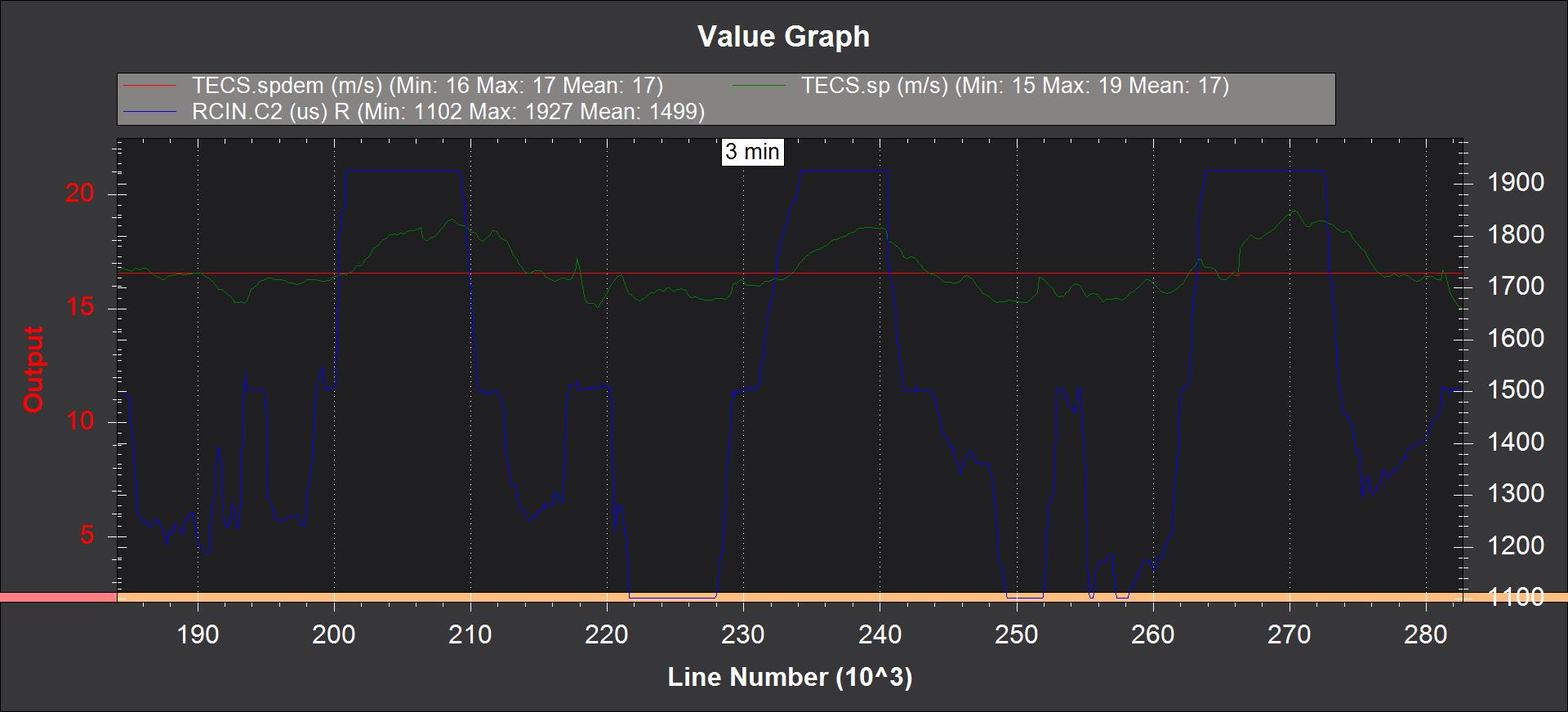
In FBWB you regulate the airspeed direct with the throttle stick between (in your case) ARSPD_FBW_MIN 10 m/s (0% throttle) and ARSPD_FBW_MAX 22 m/s (100% throttle). Your stick is most time little bit above 50% = 16 m/s
Hi guys… Can someone share with me your parameter for non vectored tailsitter by using pixhawk? This is my first time playing drone… I need guidance from someone how to setting the pixhawk…
My objectives only want to make sure it can takeoff, hovering and landing… Thats all… Please help me
Thank you very much
You want to begin with something very difficult. Because the airframe has to be dedicated, calibration must be very well done and there are hundreds of parameters. Just to mention that nobody in this thread successfully flew a non vectored tailsitter. Some are close but not yet.
To begin with the wing, Commercial products are not dedicated for a non vectored tailsitter because elevons are too small. I would go with a plank wing and a low Cmo reflex airfoil (pw51, tp100, jwl65…). The CG position is critical. Servos speed and centering + servos linkages are important too. A wing made of EPP is better because it is tough and a bunch of 50 propellers is OK to begin
All calibrations must be very well done including compass and the gps must be a good one.
There are so many important parameters. I can give you a list but you should be able to observe the behavior of you wing and modify them accordingly.
Thanks for the hint.
Yes, in FBWA it reacs fast and climbs with 35° Pitch, Airspeed 9 m/s and 60% Throttle.
Seems nescessary to work into the TECS.
Will start with THR_MAX from 100% to 75%, and TRIM_THROTTLE from 45% to 35%.
The last as already recommend by you.
Regards, Otto
First real FPV flight on 10" Tablet in HD.
Accelerating when climbing with the correction in last post now solved.
Another question:
Why does it increase throttle out and speed when sinking in LOITER commanded?
Or is here nudged not possible?
I tried to sink in LOITER Mode, similar to FBWB, bevore the back transition .
Right stick (pitch) vorward, and left stick (throttle) back, but instead of sinking it accelerated.
To see in the video and the Pic.
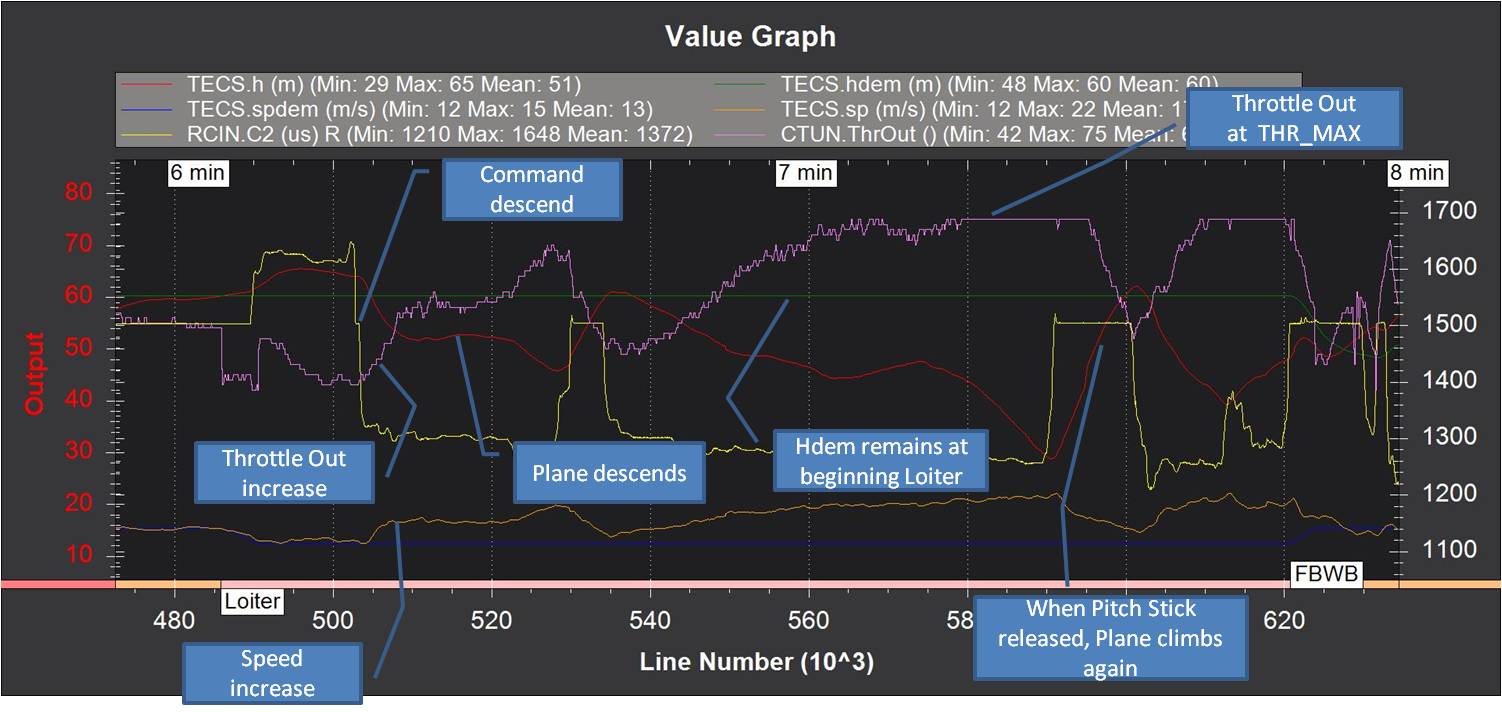
I have analized the Log of above Flight.
It is a LOITER issue.
The target Value of the altitude remains on the level of Loiter start. The plane reacts on the Pitch Stick
by the Elevons. The FC wants to hold the target altitude, THR_OUT and therefore Speed increases.
After the release of the stick the plane climbs on its target alt.
In FBWB the target altitude is influenced by the pitch stick input.
Log:
to begin adjust the CG in the range 20-23 % of mean cord.
All calibration must be OK, gps 3d fix and EKF “green”. Do not disable arming check.
The main problem is the pitch axis. You need to increase gain for this axis as much as possible. Set mixing_gain to 1.2, q_angle_max =20 and q_velz=100. Adjust servo throw in order to get ± 45° flap deflection. Now try to fly nose up in q_hover mode and increase q_a_rat_pit_p until flaps oscillate. Reduce P a little to remove oscillations and increase q_a_rat_pit_d until oscillations again, halve D. Try again to increase q_a_rat_pit_p. Other axis are not a problem and default parameters should be OK for a beginning. Now you can try to fly, push and pull the elevator stick, if you wing is able to recover from the 20° max angle you can pass to the next step: transition and fixed wing flight.