Skywalker, Test 18.
Speed in FBWB adjusted as recommended by Rolf with Throttle Input.
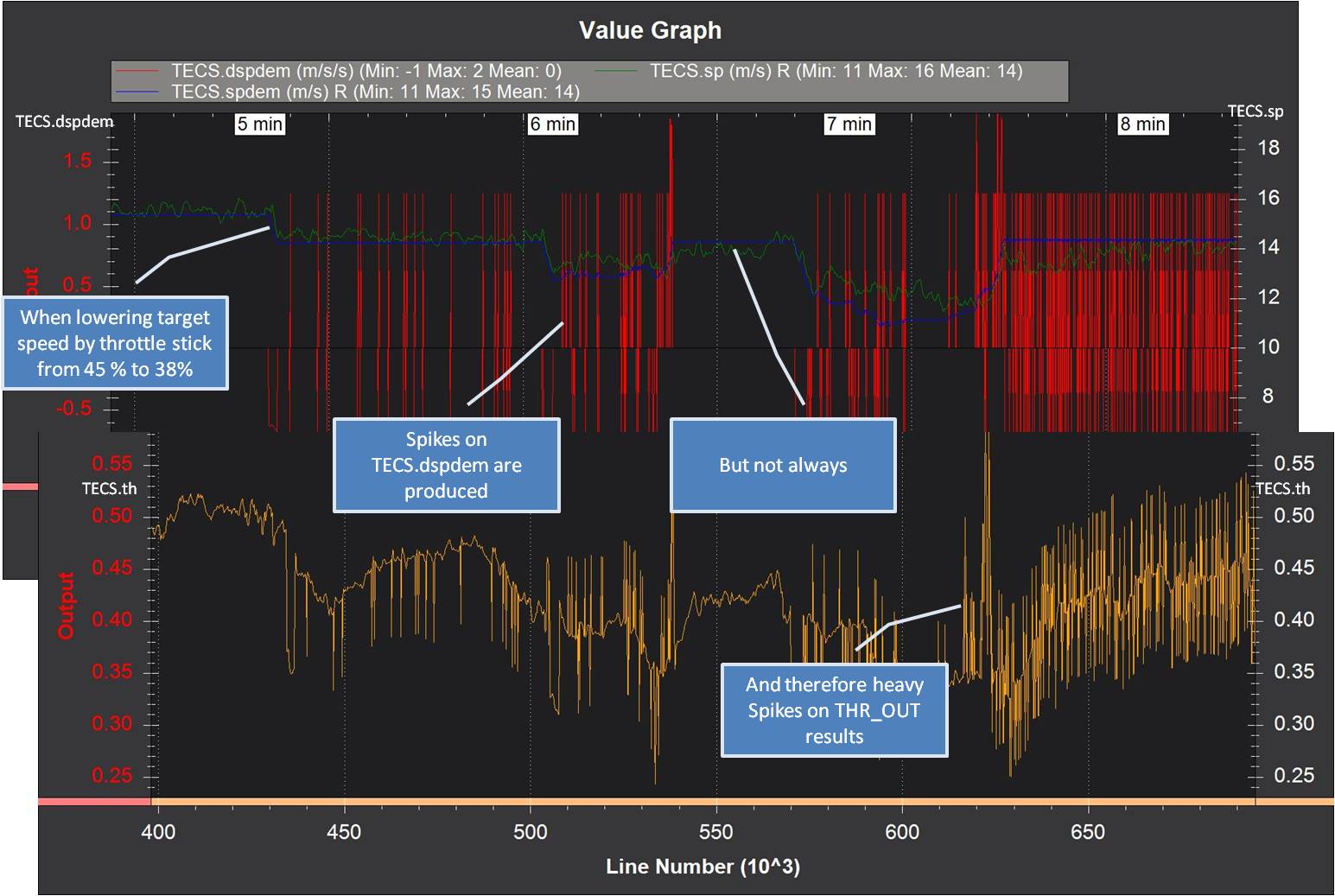
THR_OUT starts with heavy piks when Throttle is reduced from 45 to 38%. (no changes in altitude)
Sometimes OK, even when lower, in the second half of the video sounds like a coffee mill.
Who knows more about the algorithm of autothrottle?
@iampete
But see amazing QHOVER flight forward when Q_TAILSIT_THSCMX =1 and Q_ANGLE_MAX = 6500.
May be used as indoor flyer
Very nice video link. What hardware are you using. Hover flight is very nice too.
About your throttle oscillations, do you want to make a test reducing q_tailsit_vfgain. I am wondering weather motor tilt is not shaking your plane.
The spikes apears at 5 min when I lower the target speed from 45 to 38%.
And at this time I can’t see any significant variation in IMU gyro or acc. But, of course, I will test your hint.
I discovered strange piks on TECS.dspdem at this moment which correspond with the
THR_OUT Piks. I assume dspdem means the difference between sp and spdem.
But the piks have no reference to the difference.
Sometimes there ar no piks, even speed low or lower.
I would apprediate when you can help. I have no knoledge about the autothrottle algorithm.
Here the pic of my “findings” (Click to enlarge)
Thanks for the links.
They discribes exacly the same effect.
If I understood that right, in booth cases the solution was an external hardware change.
First link on the ESC and Capacitors, second link a servo change.
Both seemed to influence a hypersensitive control loop, probably via the current measurement.
Facts are:
Its a known effect.
IN FBWB (or Cruise) but not with LOITER Mode.
Below a certain value of TECS.spdem
Fixed, high piks value on TECS.dspdem
As a hardware change I see to disable the Activ-Brake of the DJI ESC’s Takyon which are set by default.
A second test will be with disabled THROTTLE_NUDGE.
But I feel all these activities only sail around the issue of the autothrottle control loop.
Regards, Otto
Hi guys looking for a little advice.
Also thanks to everybody in this discussion group for all your input and knowledge.
I have been setting up a tailsitter based on the Arkbird kit with a pixhawk controller. I have slowly progressed and now have it hovering in QSTABILIZE and QHOVER but the control respones is very slow and I am not sure of the correct parameters to use to improve response I seem to always be chasing the controls.
Bin https://drive.google.com/file/d/1n2RNLSeKy5TH4ZoRisPHUYchd6XimRWv/view?usp=sharing
I have also been trying to get my created CSV file into Dashware with some mixed results.I get a message in command prompt with the following error
D:\Logs>sdlog2_dump.py tailsitflt2.bin -e -f TailsitFlt3.csv -m GPS -m ATT -m NTUN -m CTUN -m MODE -m CURR WARNING: Unsupported format char: a in message ISBD (239) WARNING: Unsupported format char: a in message ISBD (239) WARNING: Unsupported format char: a in message ISBD (239)
but still creates the csv.
I have no idea how to correct this error?
The csv in Dashware works but seems to have missing data.
Did any of you manage to run the Sitl in tailsitter mode ?
after running :
sim_vehicle.py -j4 -L KSFO -f plane-tailsitter --console --map
i get in mp :
Bad AHRS
and
Error compass variance
also after Disable PreArm no succes to fly also with Qstabilize
help anyone ?
Looks good, but first put away the trees… or the wing
Seems to be stable, so far. Could be more critical with Pitch or Wind.
Yes, this error occure with the Log of Plane only. Just overlook it an wait until the csv File is created.
The Log does not work with Flightplot, also. The devs works on most sofisticated functions, therefore no
time for the basics
I use a batch file, to command the convert. When you safe the text below there where you have Python with the ending .bat you can call it with xxxx.bat. The .csv file has to be in the directory …\DashwareConverter\apm_dashware_master
Look which params I have with -m …, thats the reason why data are missing.
@echo off color 2F
_set /p DATEI= .bin Datei Name? _ echo warten… cd documents\dashwareconverter\apm_dashware_master python sdlog2_dump.py %DATEI%.bin -e -f %DATEI%.csv -m GPS -m ARSP -m ATT -m NTUN -m CTUN -m MODE -m BAT -m RCIN -m RCOU -m BARO cd … cd … cd …
This is the last flight of my tailsitter jet wing… ended in a big crash in a tree right after the back transition, I don’t understand why.
the log
the video, not very good… to be listened with the sound.
this is a quad motor + tailsitter according to @kd0aij code. Before this flight everything was OK, very stable and fast, up to 55 m/s
Right after switching to qhover the wing begun to oscillate and accelerate instead of pitching up. I spent a lot of time to analyse the log unsuccessfully. During the flight I have had a bad velocity message and the EKF shortly turned red.
Is someone can help me ? I would like to make a new one but only if I understand what the problem is.
@losawing Nice looking plane and impressive speed! Sorry to hear about the crash.
Do you have an earlier log with some good back-transitions in it?
And are the front/rear motors on servo channels 3,4?
The forward transition looks pretty good to me, but I can’t tell what’s going on with the back transition.
Hello mark, hope you are well after this long period of silence.
The crash is a pity because the development was not yet completed, I wanted to test Emax avan propeller with 7.5 inch of pitch instead of 5.2 and was pretty sure to get a speed in excess of 250km/h
the previous log
servo1: elevon left
servo2 elevon right
servo3 tilt motor left
servo4 tilt motor right
servo5 motor left
servo6 motor right
servo7 89
servo8 90
the log 71 shows also oscillations during the back transition but they were pitch oscillations whereas the log 72 shows roll oscillations (servo 2 and 4 are reversed)
Also the log 72 shows a weird pic with att roll right after qhover switching. I am wondering if there is not a mismatch with the angles.
The only change I brought between 71 and 72 flight was with q_tailsit_angle from 45 to 35.
Also I have changed the magic attenuation from 0.5 to 1 (since the beginning)
Hi letpi. I’m fine, but have had a lot of distractions in the past few months…
For some reason, both top and bottom motors (servo 7,8) throttled up on the bad back transition. This might have something to do with the altitude controller… I’m guessing that high thrust prevented the nose from coming up. I’m guessing servo8 is the bottom motor, since it ran harder on the good back transition, while servo7 stayed fairly low.
Which branch and commit are you flying? I need to make sure I’m looking at the right code.
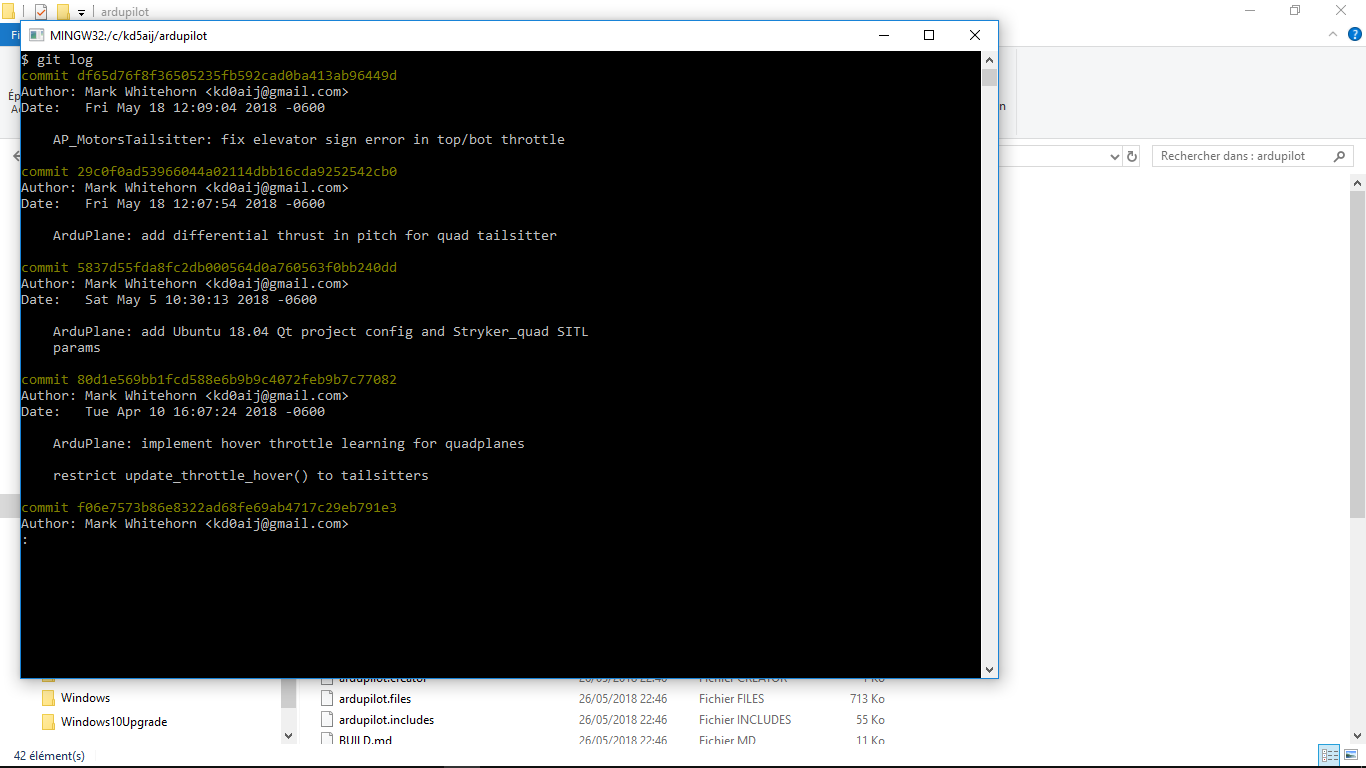
I cant say because github is still something very complex for me. I made a clone on my laptop of your stryker_quad branch. All folder are dated of the 26/05. Is there a means to get the information ?
yes servo8 is bottom motor, you can also look at small variation with elevator (rcinc2 2000 means full up) in fbwa. These variations are small because q_tailsit_vfgain=0.1. I saw in former tests that a higher gain can stall the wing even at high speed.
@losawing Type “git log” in your clone directory and paste the output here. I should be able to tell from that.
You could also create a fork of my repo then push your changes up to github. You have made some changes to the code, haven’t you?
@losawing Thanks, that’s what I needed. I’ll try to figure out why that transition didn’t work; I’ve been working on a new small quadmotor tailsitter myself, but it’s not ready to fly yet.
Hi Guys back again.
I have been testing in qstabilise and qhover and have made slow but steady improvements.
I had two flights in the still of the evening yesterday and was pleased.
The aircraft is very steady but slowly drifts away from me and no matter what I do I cant get it to hover in one place. Pitch response is slow so will I adjust Q_A_RAT_PIT_P ???. I think
Also my logging stopped during my flights so cant attach my .bin file.
Advice on my issues would be great
Why should it stay on place in QHover?
I would say it is really stable.
QHover and QStabilize don’t use the GPS and in the air is always a bit airflow.
Sorry Lorbass when I say in one place I meant it continually drifts away from me and never back toward me. Sometimes it is very difficult to get it to come back toward me due to lack of pitch response. Can I adjust the elevon connection to the servo to compensate as you would in a standard aircraft or will the Pixhawk override this adjustment.
Thanks again