Hi all, tomorrow I want to try hovering and normal take-off with my wing.
When I want to try normal horizontal hand-launched flight, which flight mode do I have to use? Can I still use normal “manual” mode for that? Is yaw controlled by different motor RPM in that mode or is it not possible?
Is there anything I have to know when changing from pusher to tractor configuration? Is the CoG still the same?
Yes, you can try hand launch with manual mode. Fbwa will be fine too. Both mode allow to control Yaw with differential thrust The amount of differential thrust when pushing the rudder stick is controlled by rudd_dt_gain. But when flying in Fbwa or any stabilized fixed wing modes, the differential thrust is only controlled by Tx input, you can not expect automatic stabilization of the yaw axis. So, the thrust of each motor must be about the same.
The COG position should be about the same. To fly manual mode and to observe the behavior of the wing is the best way to fine tune your aircraft. Have fun tomorrow.
Thanks for your explonations.
I think that could be a problem. I did some thrust tests and one motor creates about 100g more thrust at full throttle (1300g vs 1400g). I do not know why. I changed the props and ESC but it is because of the motor. So I better try hovering first where it uses differential thrust.
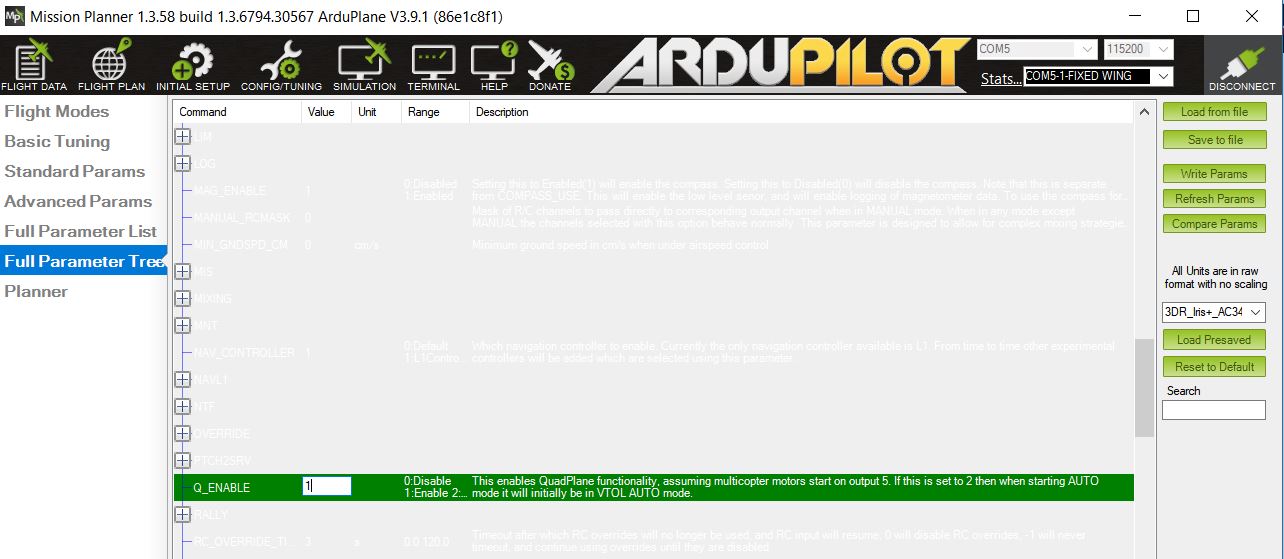
I think I found a bug in Missionplanner. When you set “Theme” to “none”, “Q_ENABLE” is not listet in full parameter list
Hi guys, my plane does not hover (or fly in Qstabilize)! After takeoff, the nose goes down and it goes on flying at an angle of 25 degree at full throllte (automatically). Because it got out of view very quickly, I decided to set throttle to 0 and crash the plane instead of going on flying in that critical condition.
I use the same Skywalker X5 as mrjadkowski does. It is hard for me to believe that he flies the Skywalker with original CoG an original flap size although I saw his videos. My motors have more power than his motors so I should have better flap control. He wrote that he moved the CoG 2cm back but I think it would not make that difference I need.
So what would be the best way to solve my problem?
Enlarging flaps? I do not have any material for that at the moment. 3mm Depron would be nice I think.
Moving CoG backwards risking a non-stable flight in horizontal mode?
Building a test frame for testing pitch behaviour? At which position should I mount the plane? At the CoG? directly behind the motors? Next to the the propellers?
What about the air speed sensor? Shoud I better remove it?
Adding negative down thrust (wich would mean up thrust). It is hard to find the airfoild center line at wings.
Other suggestions?
During take off I got the osd message “EKF Yaw Reset 28,53”. What does that mean?
AUW is 1.4kg/3lbs. Thrust 1,4kg per motor. Pitch angle at take-off was 88 degree. mrjadkowski wrote that he could take off successfully at 80 degree. Too bad that mrjadkowski wasn’t online for the last months.
Parameter I change in the code:
Q_ENABLE=1
Q_FRAME_CLASS=10
Q_TAILSIT_INPUT=1
SERVO3_FUNCTION=73
SERVO4_FUNCTION=74
KFF_RDDRMIX=0,1
Parameters I changed before when flying manually with one pusher motor (normal wing)
@Mr.1
A lot of person there experienced the problem you describe, this is because flaps do not have enough authority to keep the aircraft vertical. There are not a lot of person who successfully flew a dual motor tailsitter without the thrust vectoring option. @palm369 is probably the most advanced but still not capable of getting at the same time a stable flight in hover and fixed wing mode. His recipe is a low aspect ratio plank wing with elevon = 1/3 of wing surface and a CG very close to the neutral point. I hope not saying mistakes…
So yes, your flaps are probably too small and the CG too in the front.
The right position to attach a test rig is at the CG
Airspeed is not a problem.
Motor down or up thrust is not critical.
I think you can make some progress by
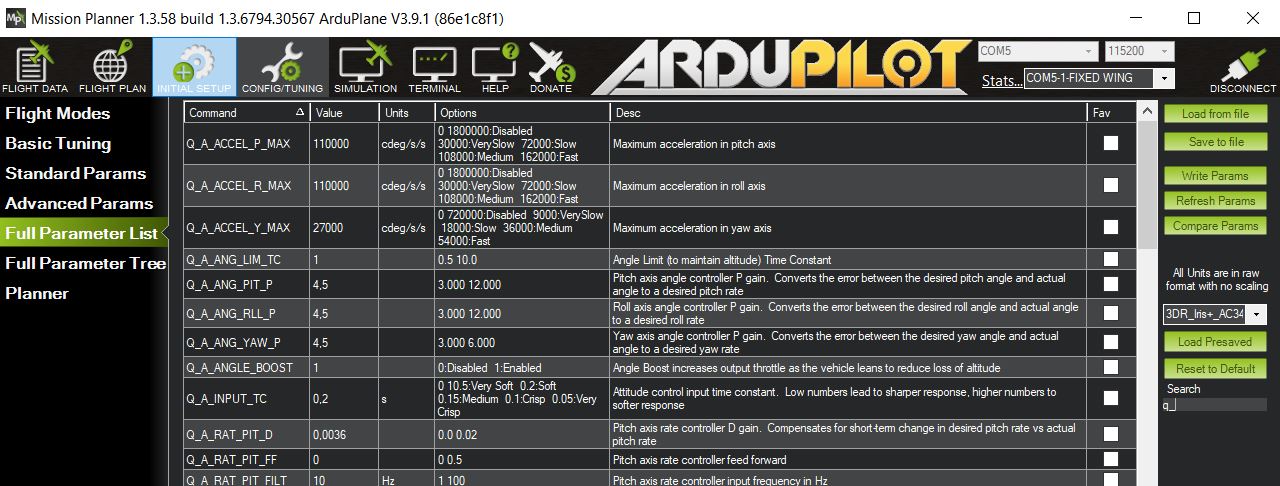
increase q_a_rat_pit_p until oscillations
increase mixing_gain to 1.2
lower q_angle_max to 2000
But the easiest way is to attach motors to servos…
Where is the video of mrjadkowski X5 ?
So you mean attaching the wing to a test rig and then change the parameters? I remember a video that showed a nice test rig here but I cannot find it at the moment. I tried to thread a string through the motor mount but that is in front of the CoG. So I have to find another way. Mounting quads for PID tuning is much easier where you do not have all these smooth surfaces.
I try to enlarge elevons 30%. Maybe that helps. What could be also important to know. My maximum flap movement is about 35-40 degrees.
Easiest way is to attach thrust vectoring? I would have to buy strong (expensive) servos, change programming that I get more than 45°, building or designig and 3dprinting thrust vectoring unit and attach everything. Sounds like a lot of work and money.
[quote=“losawing, post:1346, topic:15302”]
There are not a lot of person who successfully flew a dual motor tailsitter without the thrust vectoring option.
[/quote] When reading the postings in this group, it does not seem so.
That looks perfect! Quite heavy but instead of that… Have you tried it? So I need the 180 degree version, right?
It the LewanSoul/Longruner LDX-218 (technically) the same? I could get it from many local amazon warehouses (shipped by amazon).
I can’t order from china at the moment because I will change my flat next month. And I do not want to wait.
The working voltage differs on every store.
RDS3115mg Aliexpress: 4.8-6.8V
RDS3115mg: Fasttech: 3.7-7.2V
RDS3115mg Aliexpress: 4.8-7.2V
LDX-218 everywhere 6-7.4V
But adding a small 6V hobbywing BEC would be no problem.
I wonder that mrjadkowski’s skywalker hovers so well without thrust vectoring and original elevon size.
the question of supplied voltage at the servo rail is important. The servo rail can accept up to 10.5V but the absolute maximum is 5.7V if you want to power the pixhawk through the servo rail (or use the servo rail as a backup). My preferred solution is a 5V BEC, so I use 4.8-6V servos.
You can have a look at the tilt mechanism I use post 914 (and the result post 899). Servo is Jx4409MG bought from banggood. This is a 180° digital servo medium speed. I am really pleased with them, still strong and accurate after hours or use and many crashes. Propellers must be very very well balanced if you don’t want to stress servo gears with a lot of vibrations. Genuine Graupner eprop are the best ones. For tests (and crash) the cheaper clone from Gemfan is OK.
I don’t know RDS3115MG. It seems to accept from 4.8 up to 7V. It is a little slow but should be OK.
I agree @iampete , the X5 hover because the CG was moved back by 2 cm which is a lot but the wing does not fly.
Can’t I use a second 6V power supply for powering only the tilt servos? If I do so, do I have to connect GND of servo to the pixhawk or to the 6V BEC or both? I couldn’t find the RDS3115MG in any non-chineese store so I think I buy the LewanSoul LDX-218 because the Longruner has bad reviews.
Okay so I definitely need larger elevons or thrust vectoring. Not so sure whether an (my) aerodynamic instable wing would fly.
You can power the servo rail with 6V and more provided your pixhawk is already supplied by the power module. But in that case the pixhawk will not use the servo rail as a backup is case of power module failure.
Thanks I try to build something like that. I have two old rotor heads for 450 helis, maybe I can use it.
I tried to move the CG back by 2cm just for being able to test hovering. For that, I really have to remove my 373g battery completely! If I want to install the battery with that CG I’d have to cut off some foam and put the FC to the front.
When the elevons have to fight against this heavy weight of the battery, I can imagine now why it won’t hover with correct CG and without vectored thrust. So I adding thrust vectoring at the weekend! Thanks again for the robot servo links.
Haha you were so right. With CG moved back by 16mm it hovers like a bee! I really did not expect that huge difference!
Now (Friday) I try to find out how tail-heavy the wing must be for hovering.
Edit Saturday: Today I moved back the CG step by step. At the end I still could hover with correct CG. Before I enlarged the elevons by 30%. Small improvements but helped a lot (see picture).
Now I am not sure whether I should try transition without thrust vectoring or if I should attach thrust vectoring first. The servos are quite heavy.
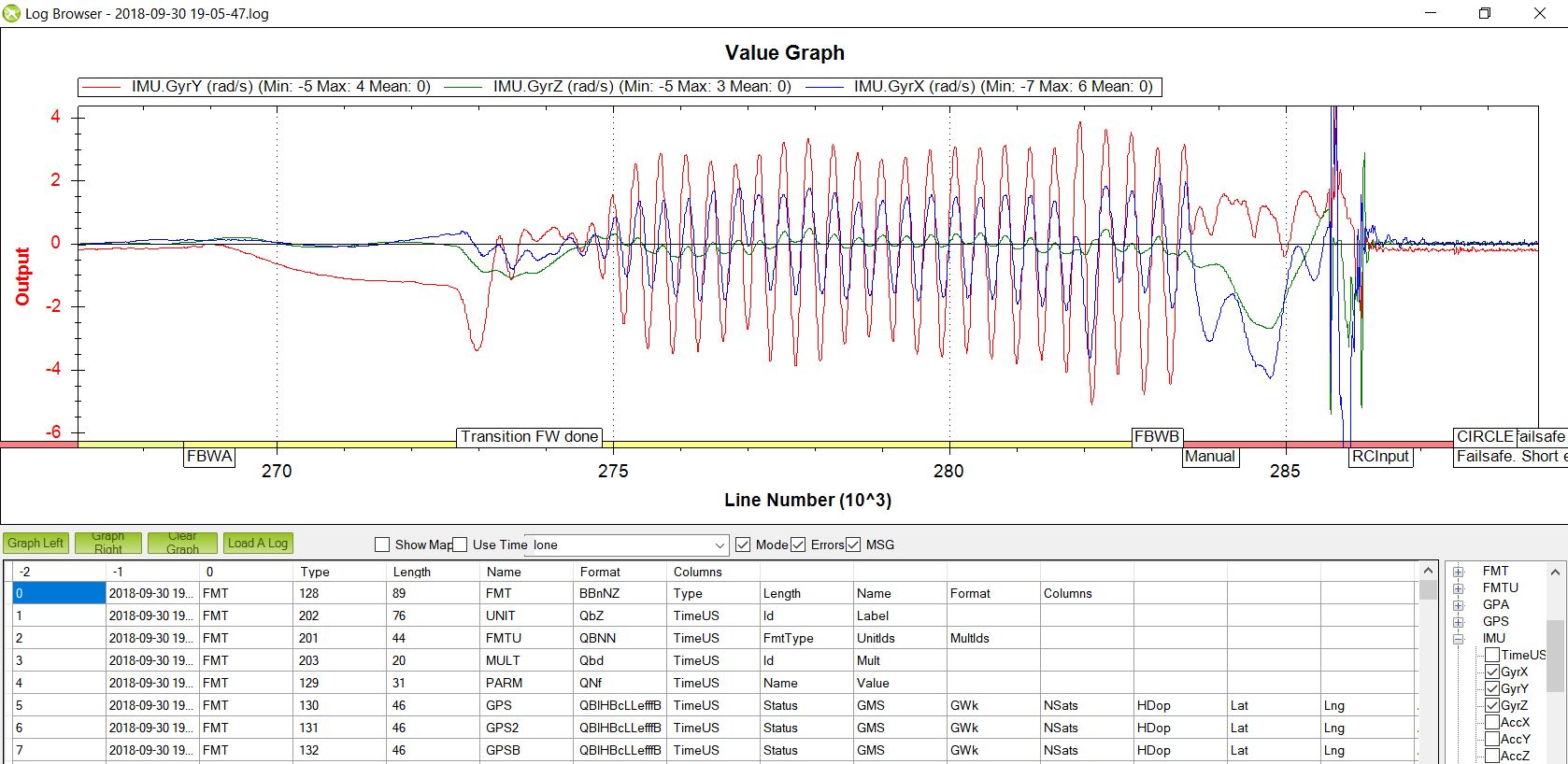
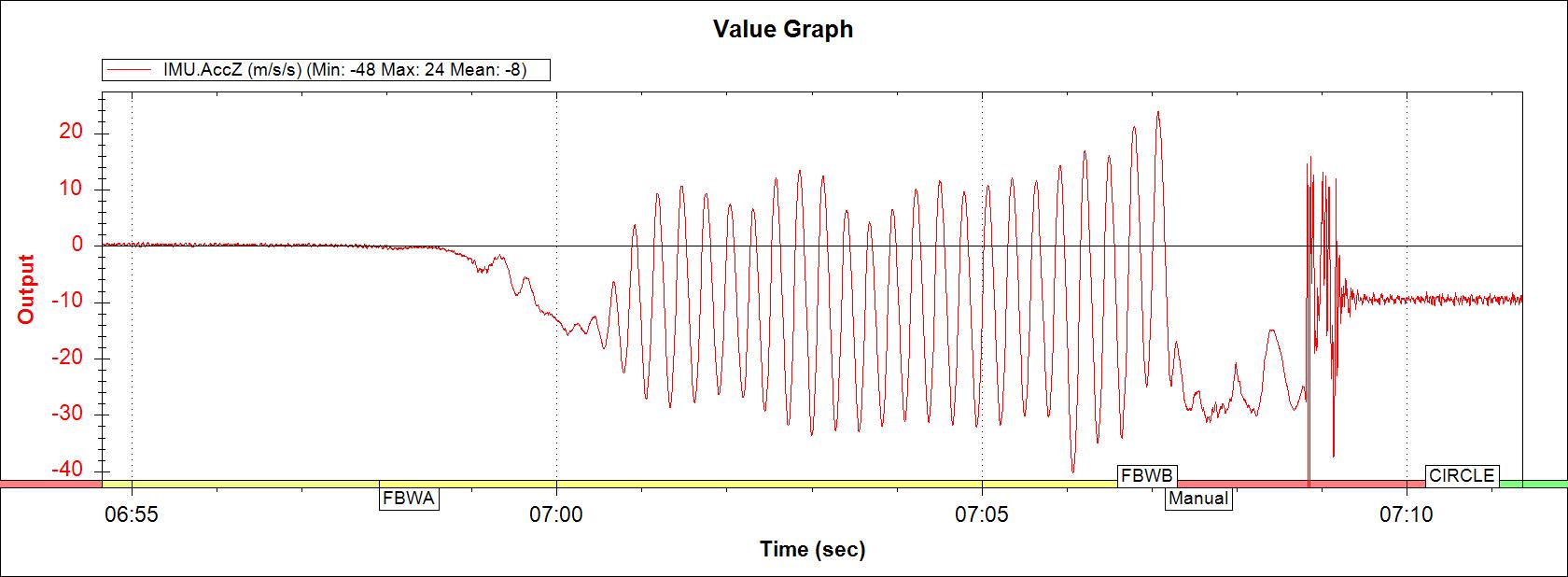
Sunday: Today I tried my first transition without thrust vectoring. The transtion was successfull but it flew in the wrong direction (90 degree left) and after transition I had massive oscillations on pitch axis in FBWB and FBWA mode. The plane did not really response on RC inputs so I decided to change to manual mode but the plane was already too far away so it crashed. One broken motor mount, two broken props and the plane broke to pieces. But I think I can fix that.
I read that I have to reduce PTCH2SRV_P in that case. But how much? With one pusher motor it flew perfect in FBWB and FBWA.
What would happen when I direct change from QStabilize to manual mode?
Was the cg in the same place as it was with the pusher?
If you go straight from a Q mode to manual, it just instantly changes so no transition. Could be tricky but you might get away with it if you go high and give it full throttle.

 After takeoff, the nose goes down and it goes on flying at an angle of 25 degree at full throllte (automatically). Because it got out of view very quickly, I decided to set throttle to 0 and crash the plane instead of going on flying in that critical condition.
After takeoff, the nose goes down and it goes on flying at an angle of 25 degree at full throllte (automatically). Because it got out of view very quickly, I decided to set throttle to 0 and crash the plane instead of going on flying in that critical condition.