You have got probably the best stability in hover for a non vectored ardupilot tailsitter.
Did you try to move forward the CG ? It will stabilize your wing in fixed wing mode. The more you move forward the CG the more the elevons neutral position will be upward giving some positive moment. It could be at the expense of the lift coefficient though.
How do you look at the acceleration ?
When I move the CG forward it won’t hover that great…
I think I first need to have another airfoil and then try to find a CG which works acceptable in hover and forward flight.
For Hover the CG optimum is where the wing has its pressure point, bus this means tha the wing is completly instable in FF.
For FF the CG must be a bit more in front of the pressure point, depending on required stability, but this means that the wing won’t hover at every angle of attack with zero flap deflection because it will always have to counter the aerodynamic moment of the wing.
Was flying again this week. Tried to tune the pitch axis. No luck yet. I also destroyed the craft after the last flight and will go on building a completely new one with adjustable CG location and other fuselage + other airfoils. Should then solve all problems. 
Great, thats staying power.
Good luck
But for me perfect tuning in the first flight until autotuning.
Perhaps to much trust in “Autotuning”
Or not enoughe autotuning cycles.
PlaneWiki:
So you need at least 20 full stick movements to learn a reasonable tuning value.
Otto
Hi palm369
nice project! I have three questions
- Where is your COG? Wouln’t it be better if you had a wing with more wing sweep that you could put your propellers nearer to the COG? I read that tractor configuration on wings had a destabilising effect.
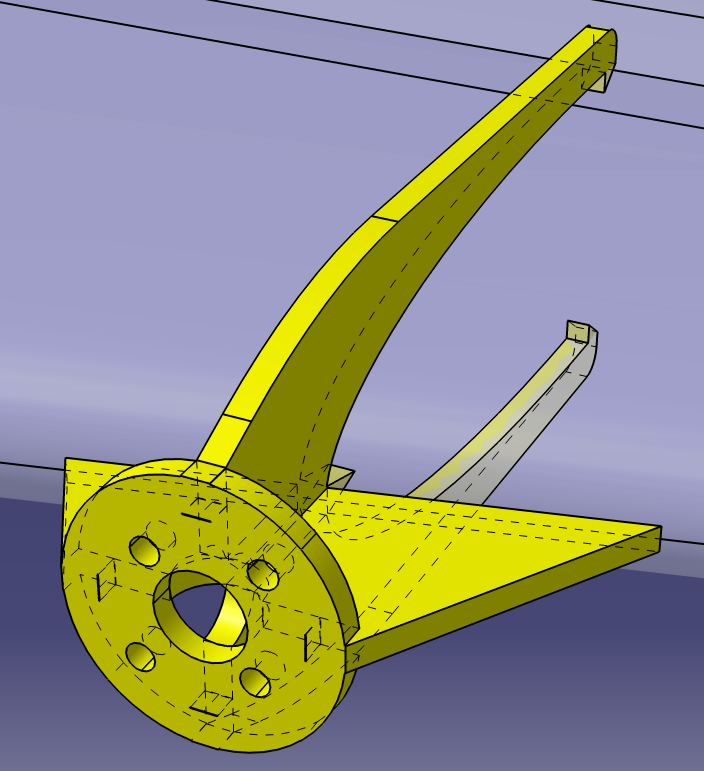
- Can you post a pic of your motor mount? It looks strong and easy.
- Do you have any down thrust because of your tractor configuration?
Autotune does not work when the plane is aerodynamically instable. Actually the only thing that can make it fly is a super fast and perfectly tuned control loop. Or building it aerodyn. stable, so with the CG infront of the wings pressure point and not right ontop of it.
Thx.
- CG is at 1/3. What difference you think it makes if props are in CG location?
- Actually I destroyed plane after last flight. sorry
- Don’t unterstand the question
- I thought it could make it more stable if the pulling propellers are more near the CG or pusher configuration. Is your airplane aerodynamically instable? I think not, CoG at 1/3 seems to be normal, maybe tail-heavy for a wing.
- Bad news! Hopefully easy to fix.
- In german it is called “Motorsturz”. Normally tractor configurations have a little negative and pushers a little positive. Do you have that?
- According to FLZ Vortex its instable. I did it intentionally so I have good hover performance on any AOA without saturation of flap angles. Take the Tailsitter of ETH Zürich as reference. I also explained a lot of my design rules in this thread already, including this.
- I threw away the plane because I want to built a new one with “S-Schlag Profil” like MH45 or so.
- No I don’t. “motorsturz” is done so that the thrust vector passes through the aerodynamic center. eg with high-wingers and no pitch up moment is induced by gas. Everything is intentionally symmetrical with mine.
- When it is instable, can you fly in manual mode (horizontal)? I though flying an instable airplane is impossible without fly-by-wire.
- Can you tell me how you attached the motors to the x-shaped wood? I would like to do it like you.
- Okay so I won’t use it.
Thanks for the interesting CG Video. Many things clear now.
So if in your case the CG can’t be moved due to Hover Stability, you think about moving
the neutral point backwards by modifying the wing shape?
and it is like that
I does not matter if I move the CG or NP. What matters is the distance from each other.
- CG infront of NP (common case): Stable, but there is a moment needed for the plane not pitching down. See video posted before. Tailless aircraft use reflex airfoils for that.
So plane auto pitch up with speed and pitch down when speed is to low.
Problem for Tailsitter is that you need to have elevator pulled when flying at high AOA. Than flap angles can saturate and you not able to get in the vertical hover position cuz you cannot pull more elevator. - CG right on NP: Instable layout. Advantage for Tailsitter is that you can fly on any AOA without need for rudder deflaction (!!!). See paper of ETH Zürich Tailsitter for that. Already posted that before.
- CG after NP: I am not sure if this is flyable in any way. Normally immediate crash. Like throwing an dart arrow with tail first.
So you all see that Wingtra solved that. I think they did it by having a combination of a very good tune and a CG just a little bit infront of the NP, so you get aerodyn. stability but don’t have the problem with flap saturation. This is what I want to try next, but I need a new plane with reflex airfoil for that.
So If you wonder why my plane flies so good in hover → because my CG is where the NP is. This is also the explaination for why it flies so crappy in forward flight. ![]()
You want to know where your NP is? Do one of this: (I did both)
- Built a FLZ Vortex model of your craft and it will tell you FLZ-VORTEX
- More easy → Change your CG like that: When you fly in hover at about 45° AOA and your elevator goes up, then put CG bit more in the rear. When flaps point down, put CG more to the nose. Repeat this until you find the CG spot where flaps stay neutral even at high AOA. That is where your NP is.
Some documents you may already know
the first one about PW airfoils
the second from ETHZ in which we can see they use PW75 for a tailsitter project.
https://www.researchgate.net/publication/303886416_Full_Attitude_Control_of_a_VTOL_tailsitter_UAV
According to peter Wick, PW airfoil were designed in order to minimise pitching moment variation and minimize the value of the pitching moment. It means that the CG can be set close to the neutral point as you want to do.
There are other example of this new generation of airfoils dedicated to plank wings: Tp100, Az2007, FAD17…
http://alain.zutter.free.fr/Ailes/index.html
One drawback of these airfoils is they need control surfaces without play and very good centering servo.
A last link to soaring digest where you will find a paper about a plank wing with moving CG.
1 Like
@palm369
An other rc soaring digest with an interesting document from peter Wick in which you will find Cm=f(alpha) curve for PW airfoil
I just created another feature request to make the tailsitter work better. This is important to every one, if vectored or not. Maybe one of you know how to code and could try this?
Please add your thoughs. Maybe one of you have a video or log where you can see this behavior, so we can add it on github.
Thank you very much for the links, I will have a closer look at them soon when I have more time.
I am not totally sure what difference it makes for the tailsitter if I have such an airfoil or the symmetrical one I use now. It also has low cm (NACA0015)
Low cm definitely makes sense, so if you want to pitch up at high aoa + low arspd you don’t need to have to deflect the rudder so much and also can put the cg more in the front for same amount of deflection. Correct?
@palm369
Why your former wing got unstable from time to time? Maybe because the neutral point moves a little and you don’t want to increase the static margin for hover stability reason. But this is only a supposition.
Theoretically Cm is a constant and Cm0 the value at Cl=0. But Cm is not really constant and as a consequence the neutral point is not always at C/4. The position of the neutral point depend on Cl and is given by the relation 0.25-dCm/dCl (the slope of the curve Cm/Cl). Thus to ensure stability, the CG must be safely in front of the C/4 point. This is the static margin.
Yes low Cm airfoil make sense for a tailsiter because of the low value dcm/dCl, the static margin can be theoretically reduced to less than 5%. I don’t know how your symmetric airfoil behave but at least you can expect a much better Cl/Cd ratio. And yes, as a fixed wing, deflexions of control surface are much smaller. This is why, everything must be rigid and control surfaces not sloppy.
Finally thrust vectoring is much easier 
Hello!
I have built and flown two non-vectored tailsitters, crashed and learned a lot. However, there is one problem I can´t get rid of. When flying forward in QLOITER it is possible to get a unrecoverable amount of forward tilt, as can be seen by Pitch and DesPitch diverging in the attached logs. Notice also how throttle is lowered to compensate for the increased lift caused by the wing moving through the air, reducing control authority.
In QSTABILIZE it is easy to manually correct for this by giving a short burst of high throttle, increasing airflow and control authority.
In QLOITER the plane looses control and only recovers after dancing around over the flying field.
In calm weather this behavior must be provoked, however in bad weather it can just happen making the use of QLOITER unpractical.
Does anyone know what can be done to help with this?
Kind regards,
Björn
https://drive.google.com/open?id=1vX-fI2CkU-Vr6oBBvW0v9-U-r3EniDAm
Hi Björn, please read my posts from a week ago. Probably your cg is too far in the front.
Or change to a vectored as I did after 3 crashes with a non vectored.
The angle boost parameter may help, it gives extra throttle at high angles, never had much luck with it though.
also another vote for vectored over none vectored.
The alt hold and loiter modes will always have trouble at high lean angles, the controller expects the thrust to have the dominant effect on altitude, once the wing starts working the angle of attach of the wing comes into play, just as you would control the altitude of a standard plane with pitch not throttle, the controller does not know what to do.