@lorbass
Sorry, I don’t understand what you mean with the graph.
This is how I understand the integrative I term. If I am wrong I hope someone will correct me. I is used to cope with a plane out of trim. When your aircraft is well balanced and well trimmed you don’t need I and I log should be around zero all the time. I is built from an attitude error over time. I needs time to increase and also time to decrease. The time needed to decrease is critical when the plane attitude is changing rapidly after a bad event or if you are close to the ground because the correction can be out of phase.
@palm369
I tried all FF from 0.02 up to 0.2 and never saw any effect.
I_max limit the deflection of the control surface induced by I. Does I_max has an the effect on I building ? I don’t know. I believe the best thing to tune the plane controller is to rely on autotune as it always gave me good results.
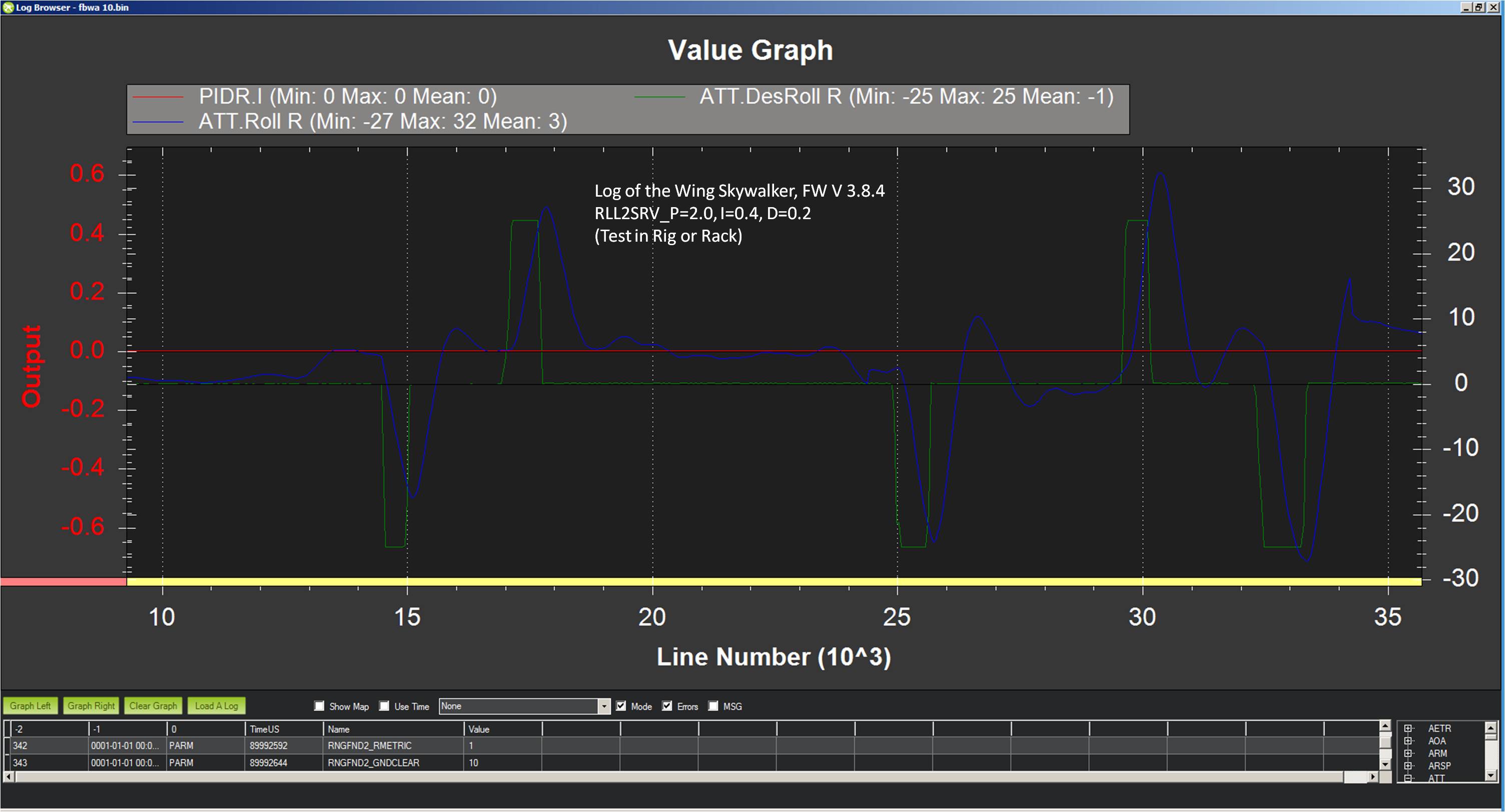
The Log of the Wing Skywalker 6 with FW V 3.8.5 the value of RLL2SRV_I shows unrealistic Values.
Seems to be unrealistic, that a wing is so perfect balanced that I ist the whole time exactly 0.0.
Here the Log
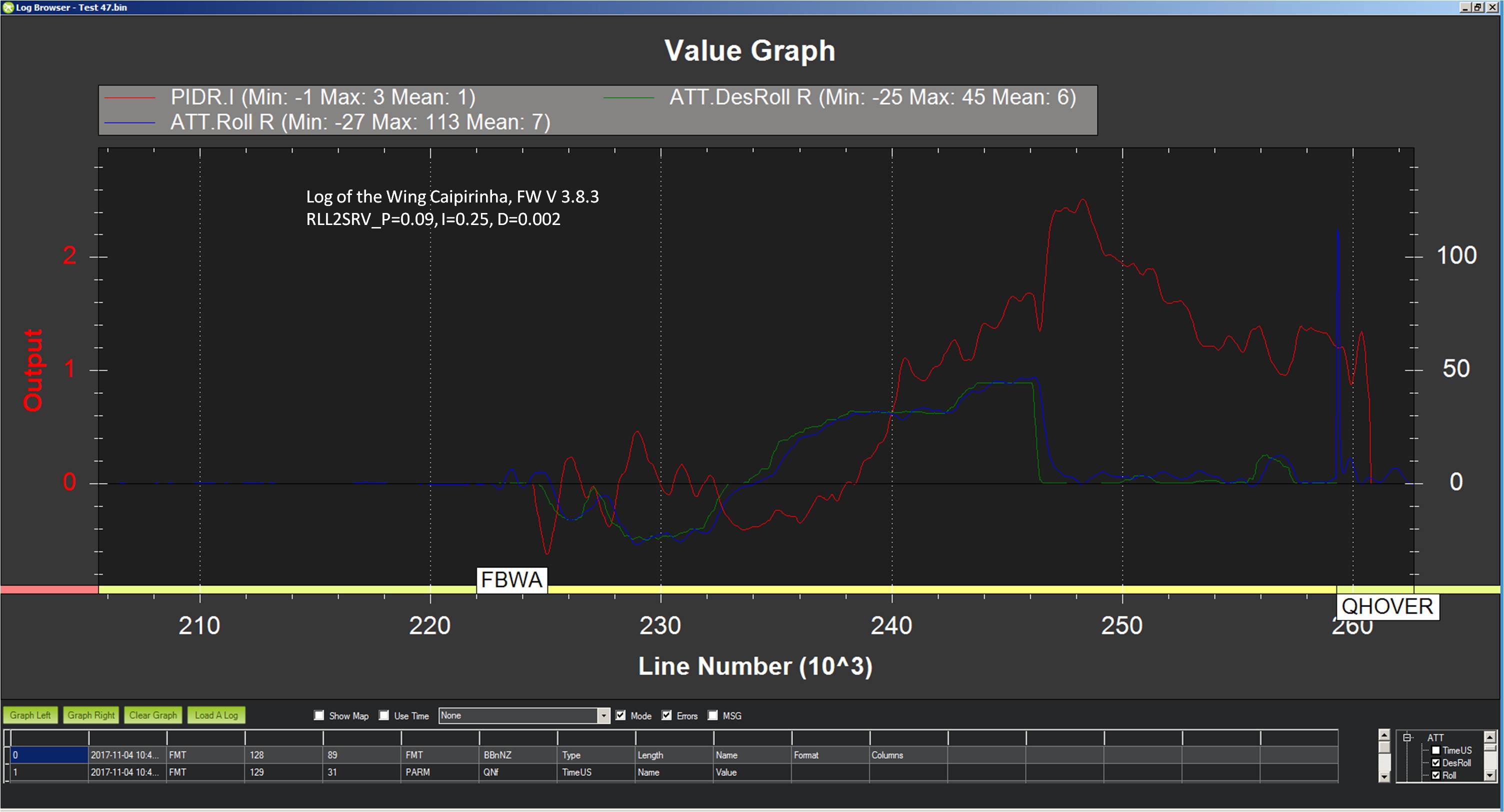
And here a Log of my former Wing Caipirinha with FW Version 3.8.3
This looks like it would work.
And if this unrealistic Value is used in flight, he has no or wrong effect.
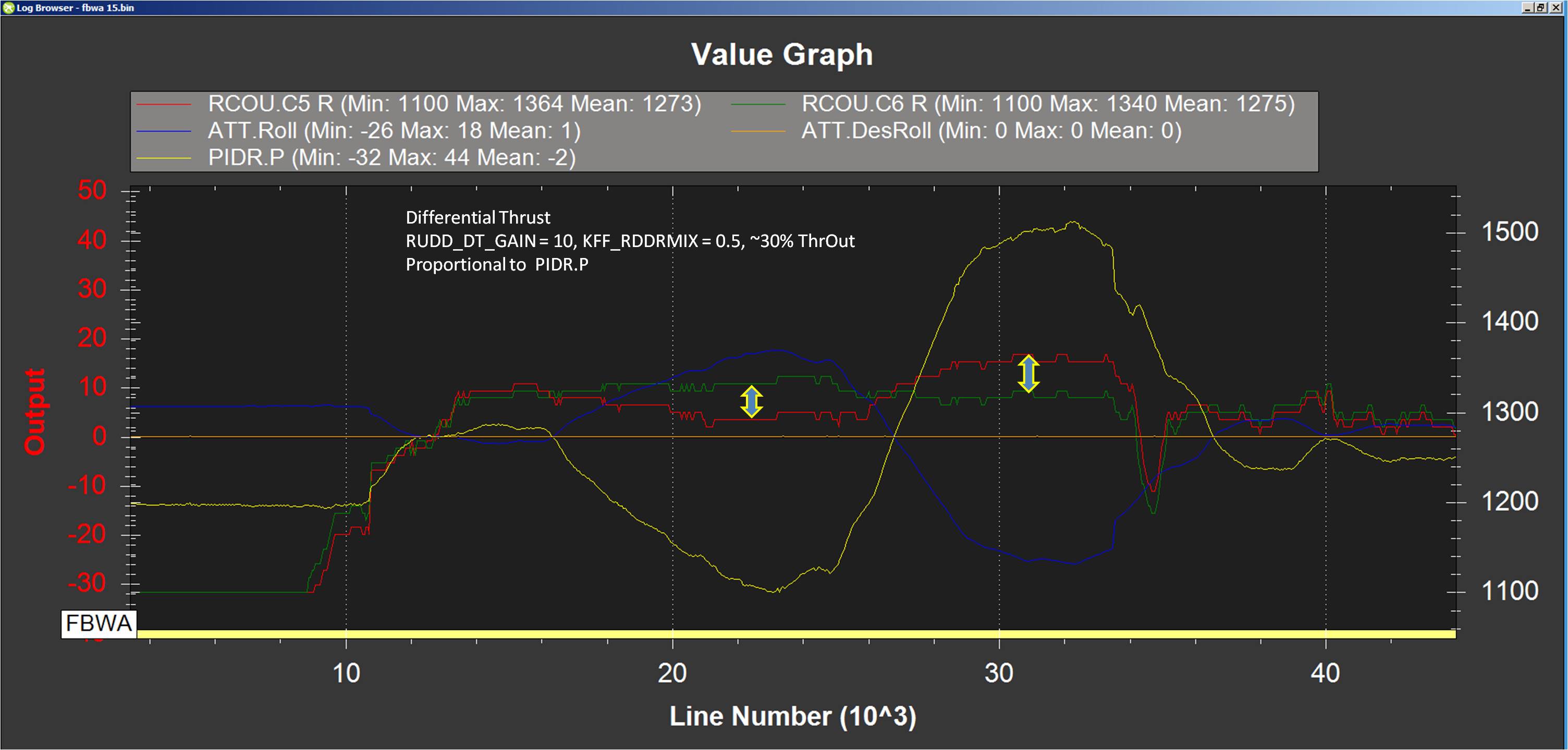
I have analized the Idea of Differential Thrust to avoid the Sideslip.
I set the Values for RUDD_DT_GAIN and KFF_RDDRMIX high to demonstrate the effect.
Surprised, it works but not as expected dramatic hard.
In the pic, the Wing was pressed dawn und up to provoc a correction.
But anyway, will attache Winglets and Rudder…
Click to enlarge the graphic.
You see it at zero, because its the “i” of the plane PID controller, but your in the copter mode. You need to have a look at “PIQR_i”
In the log the:
- “PID”-Messege contains the Plane PID Logging
- “PIQ”-Messege contains the Copter mode PID Logging
Also pay attention that the Roll axis of copter mode is the Yaw axis of plane mode ![]()
Unfortunately I can not help you, I arrived at this thread at the time 3.8.3 was released.
You can use QGroudControl with any firmware version.
Hi, did you already try larger elevons? I like your idea of using a skywalker X5. I also have one. It flies like a normal wing but VTOL would be very interesting because it is very hard to hand launch. But I am not sure if I should build a thrust vectoring unit or not. Almost 50EUR for one servo is a lot of money for such a project. And there are other parts to build and buy for the thrust vectoring unit. If it flies without thrust vectoring, I would like to try that first. Two motors and two ESCs are waiting for taking off 
Why do you know thats Kopter Mode?
Here the same pic from the beginning with the Mode FBWA.
(Last where a cutout)
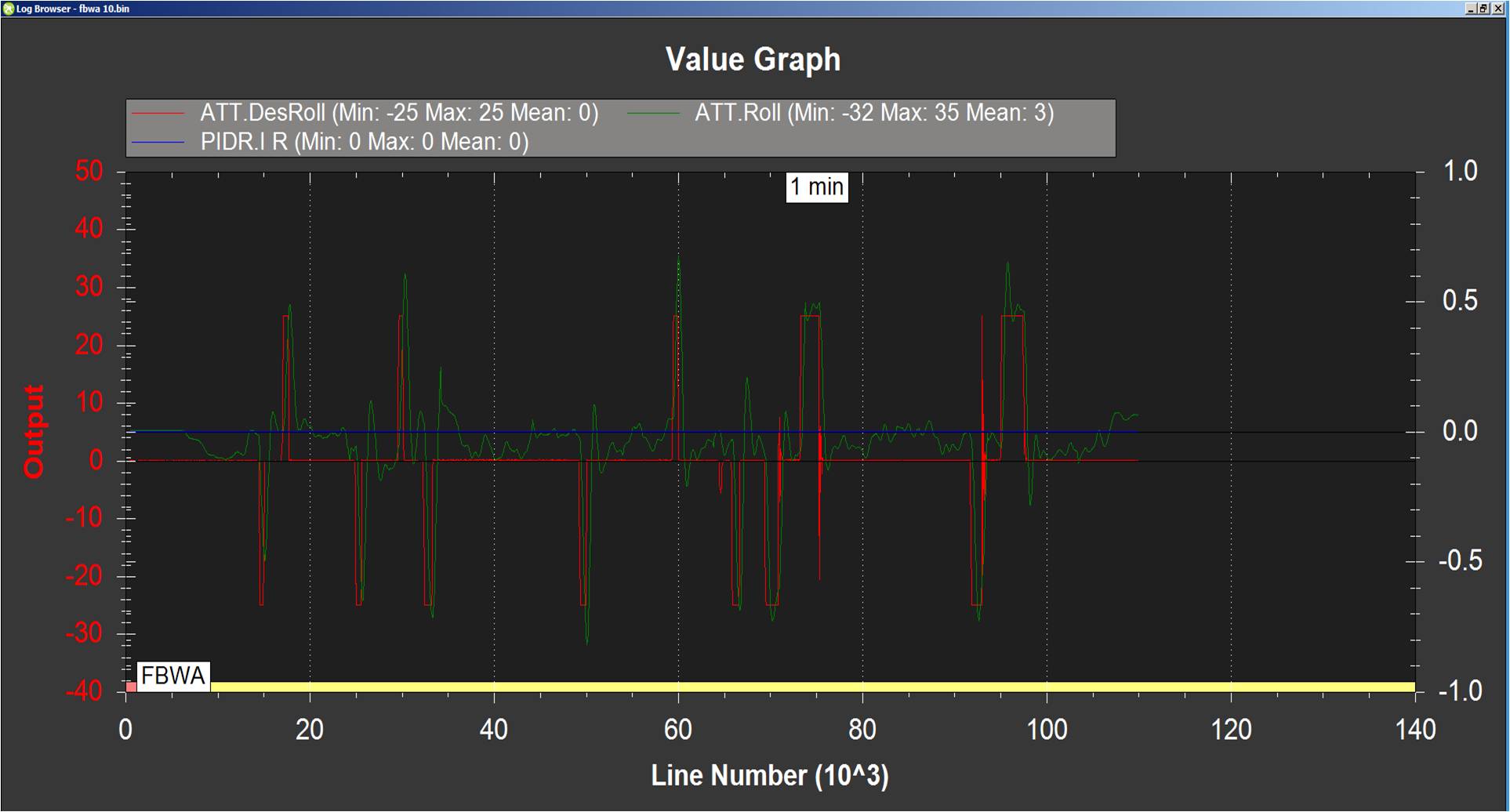
And this is one log only as example, I have 15 without Values in PIR i.
P and D are OK.
Otto
Finally got it flying in fbwa.
May be due to the attached winglets and rudder, differential thrust or both together.
Still in save altitude, therefore small wing in the air.
Log File:
Video:
Params:
Test 6.param (16.2 KB)
Otto
Hi all, I have put in another pull request. This shorts out the ‘pumping’ seen at high airspeeds in Qmodes. Essentially if your at a low airspeed it uses the VTOL gains and if your going fast it uses the plane gains.
I don’t know for sure. In your latest log file there are values for PIDR_I in FBWA and no values in Copter modes.
Good Idea is really usefull
Otto
Yes, in the new version of MissionPlanner they are now shown in the graph.
Among new features there is one concerning VTOL: improved VTOL flight code, with improved transition support and loiter
It should be applicable to tailsitter, however I don’t really understand what improvement has to be expected.
I have added Q_assist support to my latest pull request, here is a quick demo with then without it enabled.
Mark, your ‘Dart’ quad-tailsitter has inspired me very much. So far I built single copter and carried out few succesful flights. I can see that tailsitter software is giving more possibilities than single copter one. I am looking for proper assignment of SERVO#_FUNCTION. I can see that for dual motors tailsitters elevon feature is quite good. But I would like to use single motor and four fins below in the prop wash. My idea is to use elevons for two fins and rudder for third one. Still do not know what to do with the fourth one? Just duplicate rudder or there is another assignment for this type of frame. It would be appreciate to get some guidance. Kind Regards.
First flight after some time.
AUW is now 1400g from the before ~800g.
6s 5200, 10x6, 580kv.
Again calculated PIDs for Q_roll with Ziegler/Nichols method but they were not usable because of oscilations. Had to manually reduce them. For hover pitch and yaw I used the same PIDs as I used in my earlier videos and It seems to work. Did not try to retune them.
In Horizontal flight you see the yaw drift while doing the transition.
Then you can see enormous oscilations in both roll and pitch. They increase with speed. Log said that it had a maximum of ±11g (!!!) where I put full throttle and went to about 28 m/s.
I dont think that I will be able to make this more stable in horizontal flight and still use the symmetrical airfoil (NACA 0015).
FYI BLHeli passthrough currently does not work with tailsitter https://github.com/ArduPilot/ardupilot/issues/9340