Hi Losawing,
Thanks for the Upload.
Will have a look to learn.
With pumping I meant here from 1min57 sec. (not shutter)
To see in the graph right, down
May be Not yet in this forum,
But with the wing already in front of the crew.
Can you share a more detailed Picture of the wing and the tilt units?
(To upload by the icon with the horizontal bar and flesh upwards in this edit field)
So you know that the damping balls are not nescessary or even bad?
Upload works, I can read your files.
Regards, Otto
hi Otto,
I have exactly the same pumping phenomena described in your video when flying fast forward in Q_hover and a little less when flying backward. I tried almost all Q parameters that are related to stabilization and not be able to get rid of the pumping.
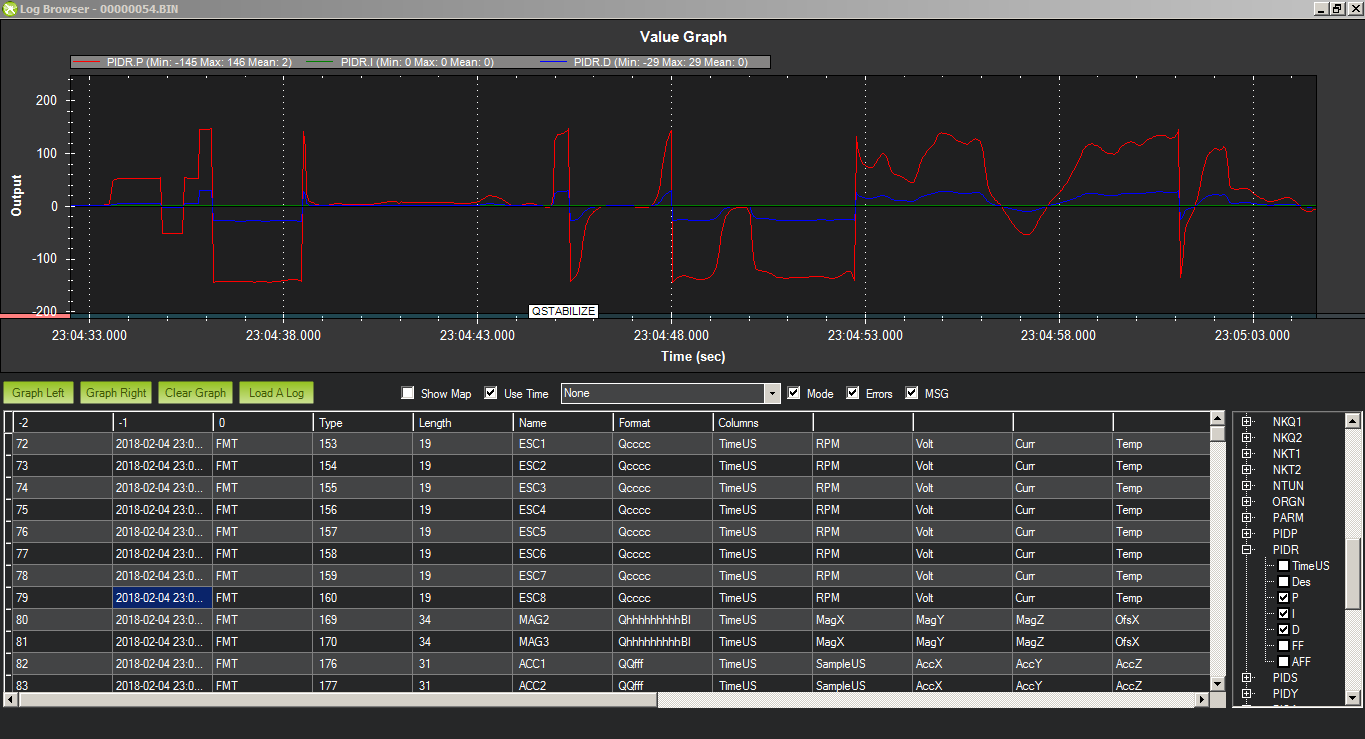
I have analysed my log.
Looking at PIQP: P and D oscillate but not I. So the oscillation is at least not driven by I (This was my first though as this is a slow movement)
Looking at RCout 5 and 6 (esc for me): RCout begin to oscillate when PWM decrease to around 1550 (the wing hover at 1700). This is why I think it could be linked to PID scaling.
About parameters, the ones that mitigate best the pumping are related to throttle controller. So what I did
Q_AZ_P from 1.5 to 0.7
Q_AZ_D to 0.06
Q_AZ_IMAX to 1000
Q_AZ_I default
Before playing with the throttle controller I saw little improvement
lowering Q_A_RAT_PIT_D
increasing Q_A_RAT_PIT_I
Lowering Q_M_THST_HOVER
But maybe the most important, I found flying the wing in Q_Hover full speed forward and trying to make short turns that there is a contradiction between the motor tilt and demanded roll (body frame). When I apply full aileron right, the right motor tilt down and the wing turn left…Sometime the elevons are stronger than the motor and the wing turn right… This could be the cause of crazy things when flying auto and maybe related to the pumping. To be tested.
About your flight controller mount, I cant say if it is bad or not but my approach is to make things as simple as possible and just in case to remove something that could be a problem. Sometime, I feel that to understand all is a luxury
Hi Pierre, I did several tests with different CG locations and found that the pumping only occurred (on my wing) when CG was in the front. When I took it a little more back, then it stopped.
Easy to try out. I just taped some nails on the trailing edge.
Cheers
David
hi David,
let me tell you a funny story. I made the maiden flight of the blue tail sitter 1 month ago. Begin with Q_ hover and loiter, I was very happy, then FBWA, not bad. As I was more and more confident one time I switched from FBWA to Manual and in less than 2s things went very badly so I switched back to FBWA but the pixhawk was unable to take control and then CRASH in the lake. My first reaction was Merde !! and the second was to remove ma pant and to go for a bath in the 10°C water. My neighbor who was resting on the beach despite the cold whether was happy that the motor buz stopped and was amused by the scene. So what ?
The good thing: not much damage to the wing
The bad thing: water in the electronic. Very bad because servo, esc, power module are trapped into the wing and glued so I had to make windows and break a lot of the structure to remove them. Hopefully during the crash, batteries were ejected and nothing was burnt. I found the batteries some hours later with my paddle board and believe me they still work nicely.
The problem was the after CG, so definitively I don’t want to play with that and I can witness that a flying wing does not fly at all with a bad CG.
An other conclusion: I am amazed by the ability of the pixhawk to fly something so unstable. Many thanks to all developer…
About the wing
The 3DR radio is on the right wing tip, you can see the antenna.
the Frsky receiver is on the left wig tip. Maybe you can see the tiny antenna.
the pixhawk lite in the middle and the GPS just behind
Pitot tube on the top of the vertical stabilizer.
Batteries compartment (here left open) at the front of the small fuselage
UBEC and power module above batteries
esc within the wings close to the motor but with some cooling.
About the mount
My goal is to make something light with a low drag
the mount is made of aluminium, one side on the servo horn, the other side on a plywood rib which belong to the wing. I have placed a small bearing in the plywood. The principal difficulty with this mount is to mechanically get all axis on the same line. This is really tricky but necessary to avoid putting stress on the servo bearing. The main flaw is relative to the servo replacement.
Difficult to answer as it depends on what you intend to do. The pixhawk has multiple output named SERVO_XX in the full parameter list. You have to choose what you want to do with each SERVO_XX among a lot of possibilities but as far as you want to do a dual motor tailsitter, the possibility related to esc control is only throttle left or throttle right. So yes, you can put 4 motors or even more but all motor on left side will receive the same signal and the same on the right side. As a Y lead would do the same, I am afraid not to answer your question.
Regards,
Pierre
Hi, Otto, my experience is interaction between tilt and elevons to much or to little will cause constant corrections that vary at different air speeds usually smaller or less elevon throw fixes it
That was my initial understanding as well. I hope someone who can code, can add the ability to basically integrate the quadplane code into the tailsitter type. Meaning, to actually have motors assigned.
The dual motor tail sitter concept vectored and non-vectored is flawed in wind. Loitering at the same altitude in wind, even just gusts, will not work 95% of the time. You either gain or lose altitude.
I can take up coding, but it’ll take me another 2 years to get this done.
Dual motor tailsitter is only a small branch of quadplane. Did you read this link ? http://ardupilot.org/plane/docs/quadplane-overview.html
Arduplane support already a lot of quadplane configuration:
•1 for quad
•2 for hexa
•3 for octa
•4 for octaquad
•5 for Y6
•7 for Tri
•10 for Tailsitter
Either with tilt motor or not
There are already so many configuration to play with.
I think you’re not understanding what I’m saying. Maybe I should be more clear.
There is no tailsitter configuration that supports more than 2 separate motors, like a quadplane at least none I’m aware of.
That way you’d have a tailsitter with however many motors you’r like. A quad, Tri, Hexa etc…
For those who want to built a large model with tilting motor, robot servo make the tilting mechanism so easy. One example of a strong and fast robot servo:
I hope not but I do not have something to tell everyday. I had stupid crash yesterday and now I need to repair. I hope to make an endurance test next WE. From what I have seen, the wing takes around 7A at 16 m/s so my objective should be exceeded.
Pierre
")