Do you mean the vibeX/Y/Z parameters that show oscillation ?
I think it’s normal as the oscillation is in its tolerance (0-5).
For the airfoil, MH45. Not symmetrical. Setup CG at neutral point while flying.
For the tuning, in the attached log, the plane was already tuned only in hover mode. In cruise mode, I left all parameter defaults. The method that my team used was just flying in hover and tuning manually one by one until noticing oscillation (Mostly mess up with P and D terms).
However, after this flight, we tried Autotune in fixed-wing mode and oscillation could be reduced a bit. Found that the default gain was too aggressive in cruise mode.
I reported this effect May 17
No dampening helped.
Even worse with a vectored Tailsitter, because of the higher mass of the tilted motors.
Only Param D nearly Zero, wich is wrong for the tuning.
May be the dev team can’t reproduce this issue, because in the Simulator the Elevons have no mass.
Seems to be an algorithm complexity for the High Scool of Zurich (ETHZ)

Or may an old fashioned mechanical method (countermass) help?
1 Like
Can’t wait to build my own. (i’m flying an X-vert at the moment). I also think a non-vectored tailsitter is the way to go for all sizes. Mechanically the most simple. Swinging huge motors and props seems like a bad idea to me.
I like your idea of a mechanical counterweight, eliminating the problem. Although i’m not sure this really is the main reason for this problem. Adding a counterweight will let you find that out for sure.
I think it’s because the pitch axes is a lot more non-linear than the other axes, and is influenced heavily by both windspeed and throttle, (multirotormode-)yaw is too, but usually we don’t make it move as fast (yaw-desired is less quick).
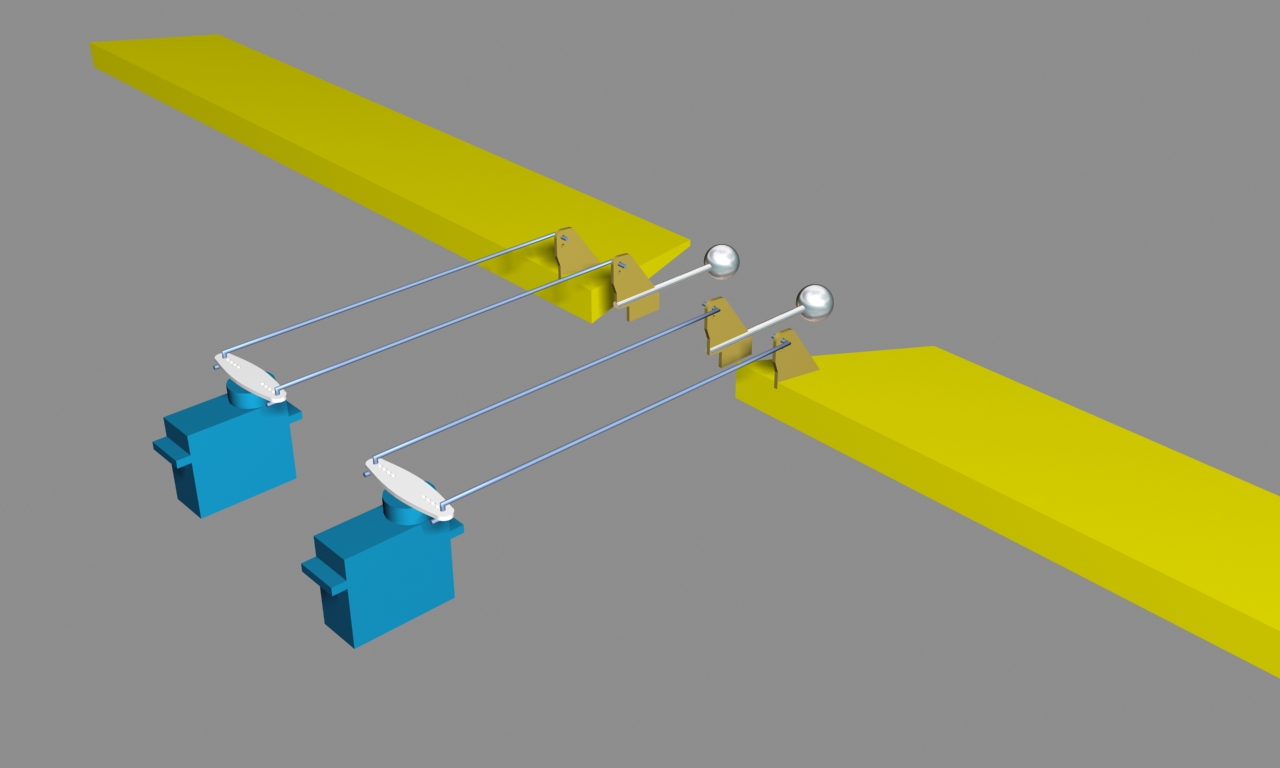
Mechanical counter balances are normal in manned aviation. (google image search)
I modified your image in paint:
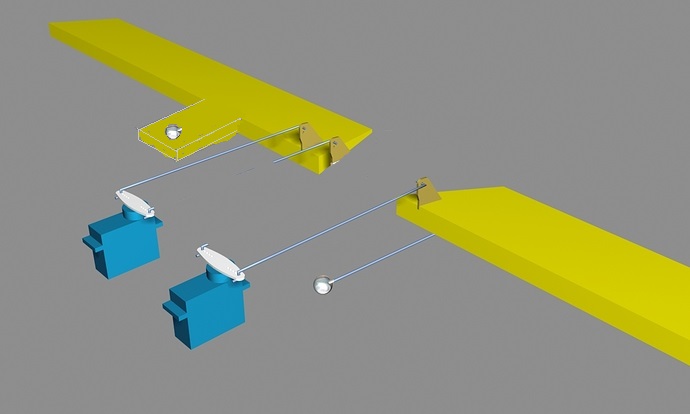
I like the top/left one, it’s a simple to make. The other one is if you don’t wat to change the aerodynamics, better to test the difference (only change one thing at a time).
Sorry, missed the video for some reason, Thought you were taking in flight.
In this case i think adding weight will make the problem worse.
I think this should be solved by making it more rigid.
Thanks for the reply, the first and only one for this item since I reported this issue.
Yes, it would not help to compensate the balance. It is the iduction of the torque wich
produce this vibration in rotating the wing and the oscilation by the FC.
Reducing Q_A_RAT_PIT_D to 0.002 was helpful.
Result of more than 100 Testflights. https://youtu.be/vq2Kvxh7roE
Regards Otto
Hi,
Another thought:This effect might be 50% due to the torque, and 50% due to the low overall stiffness of your plane and aileron. Actually this might be characteristic of modal response of the system resonating. I’m building a new custom dual with expended polystyrene covered with carbon fiber to see if this helps.
Also the pivot between ailerons and wing has to be stiff (no tape) and minimum play in the command loop (between rod and servo arm)
Matt
No I mean if you compare desATT vs ATT you see that its over reacting.
Defaults are to aggressive for this big flaps, right.
Autotune should have fixed this now.
MH45, ok. Can you tell me what happen when you cut throttle and let it soar? Does it then?
I ask because my wing will not soar. Just sinks rapidly with upwards pointing flaps. You can see this in one of my videos I uploaded (cant tell which… too many…)
I see. Yep, pitch is oscillate a lot. Not sure why. After autotune, it still happens. I suspect that it’s something to do with hardware. Specifically, both flap hinges have certain clearance of moving.
I never try cutting throttle in flight. But I think the plane will not glide so well as it has low aspect ratio wing.
My advise is to have a close look at your logs. Check the log when flying straight with and without throttle and compare RCout ( ppm out for elevons), RCin (ppm in for ELEV) to the trim value you have entered for SERVO_ (elevons). These trim values should give your airfoil a little reflex but not too much. RCout and SERVO_trim should be not very different whatever the throttle. If not, it means you have a CG issue or motor pitch issue.
The CG MUST BE somewhere between 17 to 20% of the mean cord. If not the pixhawk have to struggle a lot to keep the wing flying. This could be a reason of oscillation…
To find the right relative angle between motor and neutral cord of the airfoil, I look at the airfoil polar and choose the angle for which Cz is 0.5. In my case this is 3°, so both motor point downward by 3° relatively to the airfoil.
Pierre
While I was reading this
http://ardupilot.org/plane/docs/roll-pitch-controller-tuning.html
I found this tip that can be of interest for your pitch question
•WARNING : If PTCH2SRV_IMAX is set too high, then there is a danger that in FBW-A, if the model has been levelled so that zero pitch is too nose-up to glide at a safe speed, that the integrator will continue to keep increasing the elevator to maintain the demanded pitch angle until the model stalls. PTCH2SRV_IMAX should be set to a value that is big enough to allow from trim changes, but small enough so that it cannot stall the plane.
This seems to be more likely the cause of your problem. My understanding is that the pitch integrator is set to high and your pixhawk is not level (or maybe your radio calibration is bad ?). So you can make accelerometer and radio calibration again or test AHRS_TRIM_Y.
Pierre
Hi Pierre,
I think you got it! Because I use a sym. airfoil, I set it up to be level on pointing 5deg or so upwards, otherwise you can not fly in FBWA without pulling the stick all the time. ( at least I think so, pls tell if anyone got solution) But then when you cut thr, it should lower its nose the stock 3 deg. Then its still pointing up 2 deg and the explanation with the integrator gain makes sense.
Maybe i should just raise this 3 deg to some more like 10 deg or so…
I did a walkaround and just set “FBW min thr” to a value that this wont happen, cuz there is always enough airflow over the control surface.
BTW thanks for the link, they updated quite a lot! The graphs how the different axis controller work is nice to have.
To the CG topic @losawing : CG is critical on a tailsitter. There is a range of two actual CG locations which makes sense. The most forward is the one you would use when this plane is just a manually controlled flying wing. The most backward position you should use is the neutral point, which varies depending on your airfoil. I use FLZ Vortex to determine where this point is.
But hte is a good and bad side on evey solution.
If CG set at the normal position, the plane will fly great in forward flight but if will not fly good in high AOA settings, because of the induced pitch momentum.
If CG is set on the planes neutral point, you will have a awesome flying at any high AOA (cuz no pitch momentum is induced) and you can fly any angle without having much rudder deflection. You also wont run into the angle limit of your servo/ flap. BUT as your plane then is completly instable, it will be VERY sensitive to any deflection of control surfaces and you MUST set the PIDs perfect for forward flight.
I agree with your summary about CG. I am currently tuning my second vectored tail sitter. I think I got a good compromise between FW et heli mode, hope to be able to post a video soon.
If you want to use a symmetrical airfoil, some amount of twist at wing tip will help to get the wing self stable and maybe elevons can be set at 0°. But the question of CG remain the same.
Pierre
a video of my vectored tail sitter
It is a 1 m span, 33dm² balsa wing. Weight is 1.6 kg, CG at 17% of mean cord. Elevon surface is around 30% of wing surface. Elevon throw is ±45°. To design the wing I made a little benchmark with the wingtra. My goal is to improve wind resistance and to be able to fly more than 30km at 50Km/h. We will see…
Airfoil clarkys, 12.7 % thick, Cm0=+0.043, Czmax=1.2, flat bottom and thick trailing edge make it easy to built.
sunnysky 2212 KV1400, graupner eprop 10*5: powerful combo, good bearing and vibration free, hover at 25A.
lipo 3s 10Ah
4 JX digital servo 4409MG: fast, strong and only small amout of gear play, they are able to 180° throw provided they are supplied with 500 to 2500 µs pulses. After about 3 hours of flight those which support motor mount got a little more play. not bad…for 10€. To supply servo, I use an 8A 5V external BEC to power the servo rail, it is also a backup for the power module.
Pixhawk is mounted with pad of sticky tape directly on the balsa so it cannot move. I squeeze some hear plug between the pixhawk and the balsa. The result in term of measured vibration is almost perfect.
Tuning is not yet done, there are still a lot to do.
Pierre
6 Likes
looks great! where did you find the 8A BEC?
Hi Letpi, great project.
I thought the pixhawk is only ablye to generate pulses between 900 and 2100 µs.
500 to 2500 PWM realy works without firmware modification ?
Rolf
Rolf,
when you go to the full parameter list, the indicated pwm range is 800 to 2200. And yes it work beyond those limits.
But there is a small bug, lets try to explain. when you enter a value higher than 2200 it will not work at first, you have to modify the trim value (which must stay within the 800-2200 range). Once you have entered the new trim value, the new limit is active.
I have 750 to 2240 at tilt motor left and 900 to 2400 at tilt motor right. I get +90 to -60 °
Tilt,
The 8A UBEC is a turnigy.
https://hobbyking.com/fr_fr/turnigy-8-15a-ubec-for-lipoly.html
but obviously it is a hobbywing brand.
Verry good stability.
Especially in Hover forward and back. I got always a pumping effect.
Tuning not yet done? I’m surprised, nearly not to belive with my experience.
Can you poste a Log and/or Params?
Regards, Otto
Lorbass,
First of all, thank you for the tilt motor mount you designed, mine is not exactly the same but it was the design I started from.
Yes I will post log and parameter as soon as possible. About tuning I was speaking mainly of fixed wing.
What do you mean by pumping, do you mean elevons flutter ? This is a very complex problem with so much interacting parameters. Some ideas to think about:
Hardware part: make every thing as stiff as possible, including the wing, servo link, flight controller mount… I had a very bad experience on a quad copter with the kind of flight controller mount you have (with damping balls) as the flight controller was bouncing. Also I would make your servo link short and straight and relocate them to the middle of the elevon.
Software: nothing to say, this is a total black box for me.
Parameters: apart from the PID that must be tuned, I think that PID scaling is a key. As you know, Q_M_THST_HOVER is used to scale the PID, this is why we can increase the throttle without flutter and it works great but what happen when throttle is bellow Q_M_THST_HOVER ? Are the PID increased ? I think yes, because when flying fast forward or fast backward, the wing begin to get some lift and I can hear motors spinning slower. And yes in that case elevons begin to flutter. This is the same at the beginning of the back transition when motors spin slowly. Tridge would be of great help for that.
Link for the log, I am not an expert, I hope it will work.
I think first 6 minutes correspond to the video.
link for parameters
Since the log above I have performed autotune.
Some interesting parameters I have tried
KFF_RDDRMIX =0.4 and RUDD_DT_GAIN = 20% together give interesting maneuverability. To be used carefully because at low speed if you put full rudder and increase throttle at the same time you can make nice Uturn.
Q_AZ_P is higher than standard
Q_VELZ_MAX is 1m/s, I tried 2 but back transition was ugly
Q_TAILSIT_VFGAIN is 0.2. I really want to push further this parameter as it seems to be very powerful against stall and could be very funny in acro mode.
Now it looks better.