Noted @lorbass… thanks for the response
So the servo stay at Main Output 1-2 right?
Correct, with the following setting:
SERVO1_FUNCTION=77 Left Elevon Output 1
SERVO2_FUNCTION=78 Right Elevon Output 2
Thanks @lorbass
Is there any rules on motor rotations?
Opposite directions or one direction only?
EDIT: from @lorbass post below :
Right motor : CW
Left motor : CCW
Thanks in advance
Yes, opposite directions, to compensate thrust.
I was told from NURI Experts to set right motor CW (seen from back) to compensate
the wing end verice.
Yaw (Copter mode) is produced by the elevons or new with the vectored Firmware by tilting the motors in oposite directions.
Hi Richard,
For my Video I used a part of one of yours to explain my motivation.
Do you agree?
By the way, did you solve the issue with your dancing striker?
Otto
3 Likes
Wow,That,s great, now I’l have to get a 3d printer!
are your files going to be available ? or can I order a set that fit a DH16 hyperon servo with a universal flat wing mount slot.[quote=“lorbass, post:473, topic:15302”]
did you solve the issue with your dancing striker?
[/quote]
kinda, I limited the tilt angle to about 70 deg.and tilted the airplane 20 deg.with some landing gear ,at 90 deg.I think the sensor was trying to correct yaw and roll or both at the same time.the stryker has my controller in it, not a pix.
Rick
@lorbass Great design and video, thanks for posting. I’d also be interested in printing similar mounts; just got a roll of PETG filament to try out. I use OpenSCAD for my designs and a miniKossel printer… What tools do you use?
Of course, here the .STL Files.
Servobefestigung L.STL (24.9 KB)
Bügel L.STL (86.0 KB)
Edit: Do not use the following file. I detected a structural error due to a SW Bug in the desigen Programm.
It will break behind the air opening
Träger L.STL (580.8 KB)
This design needs exacly the correct Servo Hitec HS-5070 MH, and Wing Team BlackSheep Online Store - Secret Project.
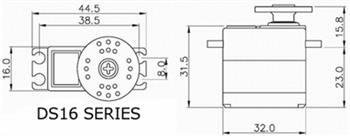
I could try to desing a unit for you, but I need really exact measures of the servo (normally not to find in internet)
and a shape of the wing as sketch with the measures.
Bevor the purchase of a printer, download the appropriate slicing SW(Normally free of charge).
And then check if a file of me can be read.
I use an old 3D CAD Programm called 3D Studio Kinetix which does no longer exist. (or with another name)
 [quote=“lorbass, post:476, topic:15302”]
[quote=“lorbass, post:476, topic:15302”]
but I need really exact measures of the servo
[/quote]
great, heres some info on the servo size, you should try these, http://www.hyperion-world.com/
also could it be just a slot say1/2"x1.5"x3" ? to make it slip it on to wing that is built to receive it
thanks
Rick
http://www.gearbest.com/3d-printers-3d-printer-kits/pp_441281.html?lkid=10340195 what do you think of this one?
An open source market leader is Lulzbot
Very wide range of materials, and when you start to wear parts out they provide .stl files of the printer components, so you just print up new ones.
Make sure you get one with a heated bed.
The TAZ 5 I have will print nylon and plycarbonate quite well.
Mike, Thanks,…looks interesting and can pic one up local,and I will read up, but I am trying to get away cheep on the first one
thanks
Rick
wow, really great video!
Are the design files available? I don’t have a 3D printer myself, but some other people in CanberraUAV do, and I think this would interest them.
EDIT: sorry, leaped in too early with my reply, I see you’ve posted them already, thanks!
Cheers, Tridge
In this case, I will post the files for the Left Unit tomorow, they are different.
And one part is missing. I will take some Pics to show the details.
http://www.hobbyzone.com/l/b61wgv7vzdbc/wcn2g149vv/
hot off the press…
1 Like
Horizon does it again… nice video here: https://tinyurl.com/y8ql4rpg
Note that the X-vert RX/FC/ESCs are one integrated unit priced at $47
1 Like
@tilt This is similar to the 3D printer I built, and relatively inexpensive: http://builda3dprinter.eu/product/kossel-mini-advanced/#printed-parts
I need also the diameter back of the wheel and the thicknes of the mounting flange and the distance of the
axle from one side.
A lever would be a better clutch as a wheel look here:

And then I need the exact lever measures.
By the way. I have no experience in judging about other 3D Printer.
I use this one https://ultimaker.com/en/products/ultimaker-2-plus
with the slicing Software Cura. Material PLA, Nozzle 0.4 mm, layer 0.1 mm
The Base Unit needs 6 hours to print.
The 3D Printer discussed here have no information about the technical data and the Software to download.
e.g. dimension, material, noise, nozzle diameter.
If you are not happy with it, they are 400$ to expensive.
Hi, Otto,
Thanks for your time, and info, but I think you probably have your own projects that should come first.
I ordered the printer, 3 weeks out, and will try to figure it out (best way to learn) and will bug you when I get stumped if thats ok. btw very impressive work.
so get that airplane flying .
Thanks
Rick
Yes, you are right. The design took 1 week. And I had to redesign due to the bug.
Aniway I will post the “repaired” files. And you can continue to learn by doing, how and if the .STL Files coul’d be used with your printer. When positiv, we can continue.
Otto