Again, one step ahead. And amazingly despite the “additional” 2 Servos to tilt the motors only 2 Servos in total.
I’m curious to see the plane characteristics.
Good luck
FC is an original pixracer with few days old master firmware installed.
After doing all calibrations and settings, we have the following issue:
In QSTABILIZE or QHOVER the highest motor PWM output is not more than 1500, in MANUAL mode PWM output is correctly as parameterized 2000.
THR_MAX is 100.
Here are the other parameters: 00000009.BIN.param (16.0 KB)
Does anyone have any idea why PWM Output in Q-Modes ist not above 1500 ?
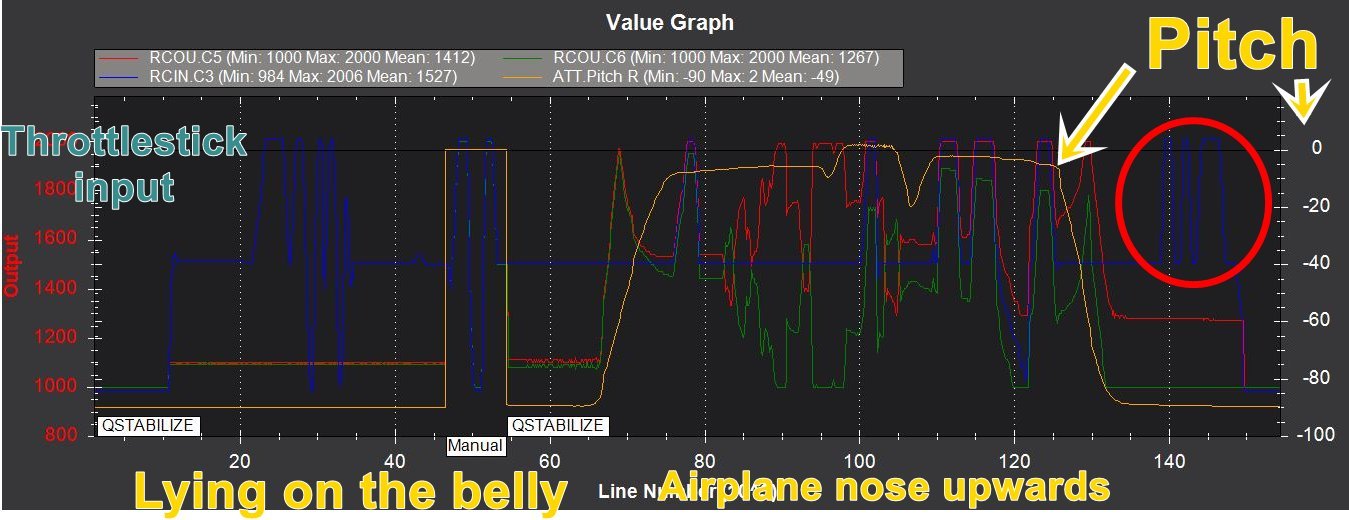
If the plane is lying on the belly, in QSTABILIZE (or QHOVER) full throttle allows the controller only to turn motor PWM (RCOUT.C5/C6) up to maximal 1400.
That is not enough to lift the planes front. In MANUAL (or FBWA) modes the engine power control works well.
As soon as I raise the plane (with the hands without props mounted) nose up, engine power works also well. As soon as the plane is lying on the belly again, motor control is too weak again (red circle in the diagram).
I can confirme the issue of Rolf above with my Caipirinha.
Even worse the max Power with Ch3in 2000 flat is PWM 1220 and in Tailsitter Pos. PWM 1800
Indicated in MP on Ch5out and Ch6out.
ESC’s and Radio calibrated.
Therefore not lying on the belly but lying in the shelve.
congratulations on your first QLOITER! Looks like it did pretty well.
The attitude tracking was excellent, the EKF was happy and all the sensors look good. Very good result!
Do you think you’re ready to try forward flight on the Illusion?
I’ve tracked this down to the angle-boost code. If you set Q_A_ANGLE_BOOST=0 then I think you’ll find that you get the full throttle range at any angle.
The angle-boost code doesn’t really make sense for a vectored tailsitter, as it is assuming thrust is to the front of the vehicle.
Sorry for not spotting this earlier!
Cheers, Tridge
Thanks Tridge[quote=“tridge, post:499, topic:15302”]
first QLOITER! Looks like it did pretty well.
[/quote]one interesting thing I noticed is as it leaned into the breeze it would descend and move forward as opposed to manual flight , would lean and climb as more lift is generated by the wing[quote=“tridge, post:499, topic:15302”]
Do you think you’re ready to try forward flight on the Illusion?
[/quote]almost, I think I will add some vertical stabilizer area for the 1st try having had some of these stright wings yaw to vertical when rolling into a turn in forward flight
This conversation mentions SERVO(1-6)_FUNCTION, but I only see RC(5-9)_FUNCTION in Mission Planner 1.3.48 (Advanced Layout) with Plane 3.7.1 on a Pixhawk1.
Feels like I’m missing something pretty basic. Would you please steer me in the right direction?