My own, using F1 and F3 processors and mux to transition, small and light but not as talented as pix.In my quest to shrink I went to 0201 components, not easy to work with ! Now I think building a pix type specifically for small tvbs…
my thinking is… 1) trying to sqeeze a little more wing area to make up for added weight,2) programmable servos can ajust , 3) yaw control force top and bottom of wing 4) can easy cut back area, foam board alerons glued on
if part ,wing section rotated to simplify I think would work and make hover useful and landing doable
FYI stryker design flaw ? my board design flaw ? when below 45 deg from vert. interaction of roll and yaw unmanagable does the dance( see video) not able to find way to ajust out? any ideas ?also little windy here ,stryker hard to fly ,nose down to compensate for wind climbs like crazy, watch out, need room !
any log files? Is this running ArduPilot?
got any pics?sounds wild, love to see it
@lorbass Channels 3 and 4 are unused on my Stryker.
I’m currently using the newer left/right elevon functions on channels 1 and 2:
SERVO1_FUNCTION 77.000000
SERVO1_MAX 1900.000000
SERVO1_MIN 1300.000000
SERVO1_REVERSED 1.000000
SERVO1_TRIM 1500.000000
SERVO2_FUNCTION 78.000000
SERVO2_MAX 1900.000000
SERVO2_MIN 1300.000000
SERVO2_REVERSED 0.000000
SERVO2_TRIM 1500.000000
ESCs are on channels 5 and 6:
SERVO5_FUNCTION 73.000000
SERVO5_MAX 2000.000000
SERVO5_MIN 1000.000000
SERVO5_REVERSED 0.000000
SERVO5_TRIM 1000.000000
SERVO6_FUNCTION 74.000000
SERVO6_MAX 2000.000000
SERVO6_MIN 1000.000000
SERVO6_REVERSED 0.000000
SERVO6_TRIM 1000.000000
Another must-build configuration!
Just need one of these on the tail for landings ![]()
OK ! how much ? so you think it’s not a belly sitter any more,… a tailbelly sitter( TVTBS)
@kd0aij,
Thanks for the detailed Params.
What is new with Function 77/78 compared to the “original” Function 4/19 I used?
Are this params in your post 184 still valid?
And are Function 77/78 for Servo 1/2 also for the vectored valid as kd0aij discribed in poste 453?
The new function doesn’t use the software mixer (param elevon_output is ignored) and it respects the PWM min/max limits for the selected elevon channels. This lets you adjust throws to avoid binding. You just need to set the channel reverse parameters correctly to get the elevons working properly. See:
@tridge New hover test log for the Stryker with reduced pitchrate P, I and D gains and thrust compensation:
Log 86 at https://drive.google.com/open?id=0Bw3digSMQXDuTHhadjZOX2JwZzQ
It looks like the digital servos and thrust compensation have resulted in very good pitch authority. Yaw authority is still quite poor though, but I’m not sure I want to risk losing pitch authority by turning up the yaw gain.
@tridge Successful Stryker flight today with forward and backward transitions using the throttle compensation patch. Wind was about 3 to 5 m/sec, and maintaining position in QStabilize mode was difficult due to the need to reduce throttle to avoid climbing. Control authority was good at hover thrust, and pitch authority was consistently regained when sufficient throttle was applied after each rather poorly controlled descent. Earth frame roll control was always solid, but the airframe’s tendency to weathervane consistently overpowered yaw control; I still haven’t tried increasing yaw gains.
Log and KMZ #87 here: https://drive.google.com/open?id=0Bw3digSMQXDuTHhadjZOX2JwZzQ
I’m hoping that a few enhancements to the throttle boost logic will make manual descents easier in wind while maintaining some control authority. Didn’t try Qhover in the wind since the required pitch angle was around 45 degrees and very rapid throttle changes were needed to avoid climbing. Note that the landing was at an attitude closer to nose level than nose up.
KML snapshot of landing in Qstabilize:
https://drive.google.com/open?id=0Bw3digSMQXDuVVJXcTNhYkZJSmM
I think it’s in the aircraft design and weight,the stright wing do all of the above, but in a much more controllable way, much easier to fly
@tilt Thanks for your advice; I’ve only worked with the PX4 “Caipiroshka” and my Stryker, and have no experience with other tailsitter airframes.
@tridge I moved the thrust compensation over to tailsitter.cpp as you suggested yesterday, and the results are very encouraging. With the new Q_TAILSIT_TCGAIN=0.8, and boost proportional to pitch error rather than demand, throttle management is much easier, and it still seems to guarantee good pitch authority, even with the yaw P gain increased from 0.1 to 0.25.
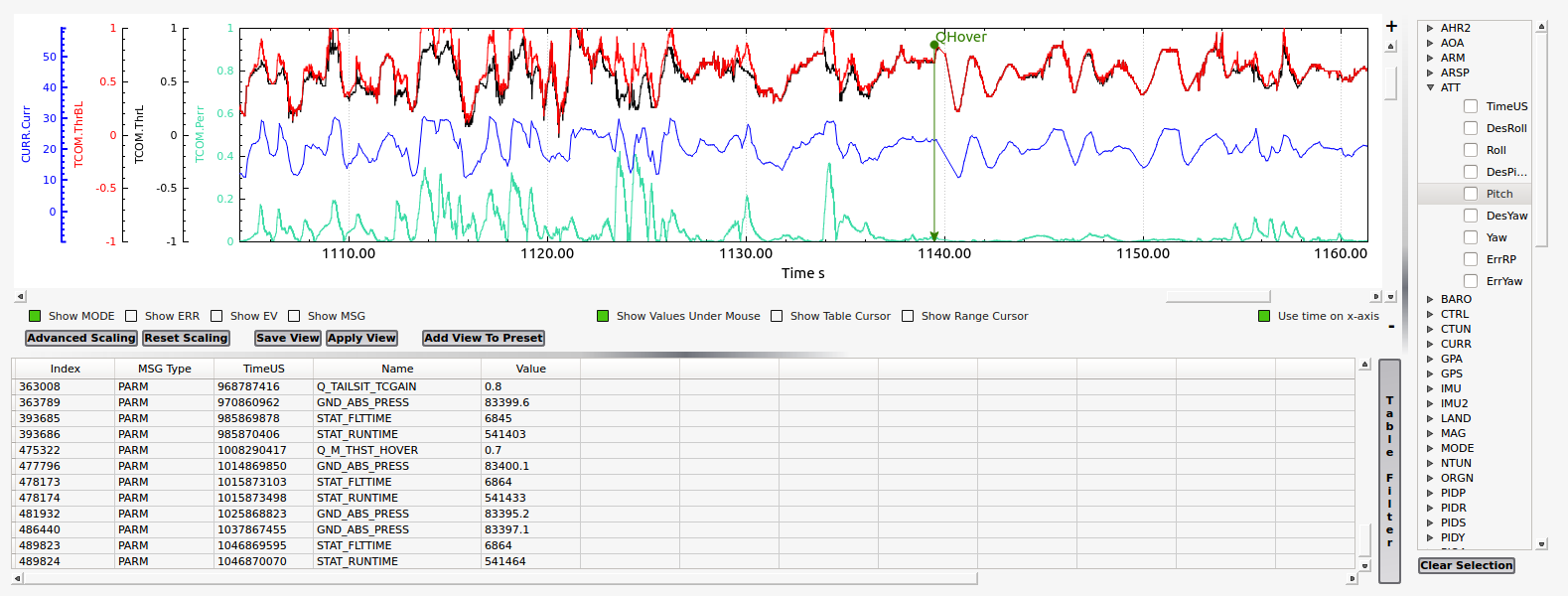
Log is #93 here: https://drive.google.com/open?id=0Bw3digSMQXDuTHhadjZOX2JwZzQ
Branch is: https://github.com/kd0aij/ardupilot/tree/mw-tailsitter-comp3
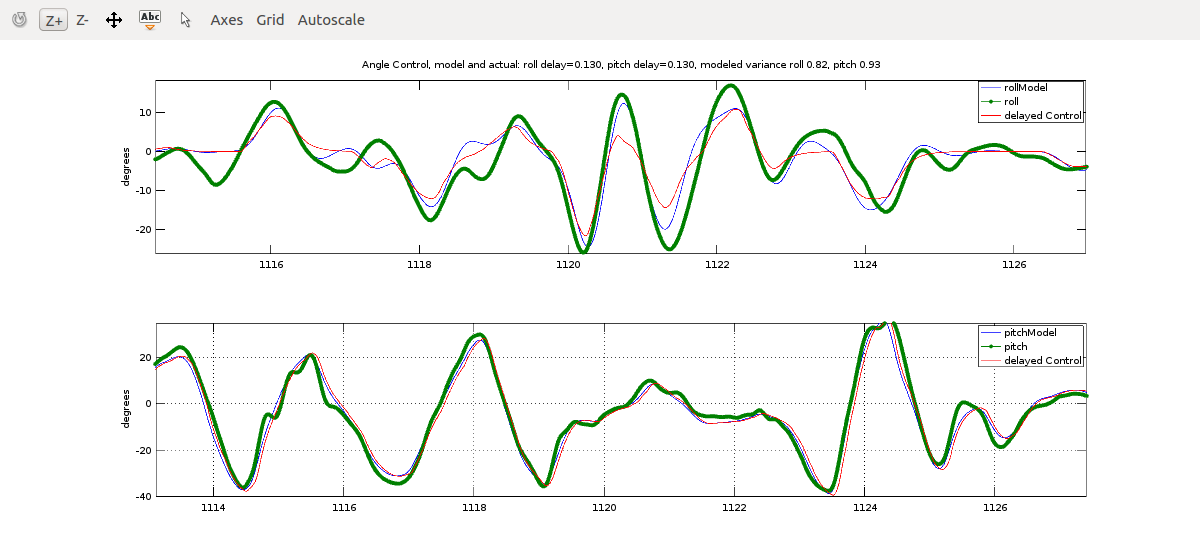
roll and pitch tracking in Qstabilize mode:
Hi All,
On the process of building Pixhawk controller tailsitter plane with custom airframe (non-vectored)
Just to clarify the big steps (from this build tutorial and several Tridge post in this forum) :
- Load latest ArduPlane firmware
- Following Tridge second post:
Pixhawk Main Output:
Plug motors into main_out(3-4) servo rail --> Correct?
Plug servo into main_out(1-2) servo rail --> Correct?
Set:
Q_ENABLE=1
Q_FRAME_CLASS=10 --> any guidance what the “10” mean?
For initial testing I’d also recommend setting:
Q_ASSIST_SPEED=0
If you have left throttle on channel 3 and right throttle on channel 4 then you would use:
SERVO3_FUNCTION=73
SERVO4_FUNCTION=74
Then test flight in QSTABILIZE and QHOVER mode.
Please add/correct the above steps if require.
Many thanks in advance
In an early post of Tridge he told me to use Output 5 and 6 for the motors
SERVO5_FUNCTION=73 Left Motor Output 5
SERVO6_FUNCTION=74 Right Motor Output 6