ahh, I’d forgotten that! That would have been because the pitch D was not contributing much to the overall pitch control, so I suggested raising it. Now the pitch D is dominating your elevator output, so it is clearly too high.
What I see in your latest log is the following:
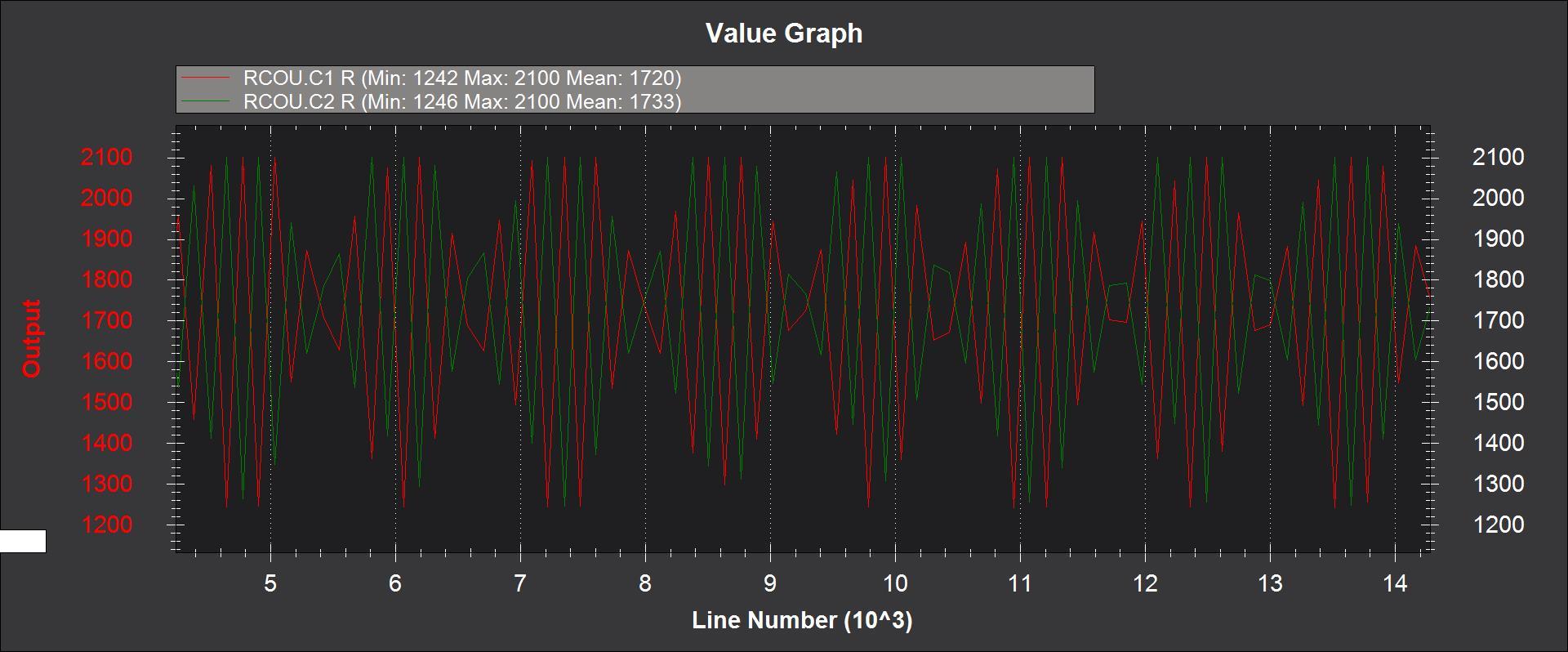
both your Y gyros show 13Hz oscillation, showing the IMU is oscillating about Y axis (pitch)
the servo movement is in time with this oscillation
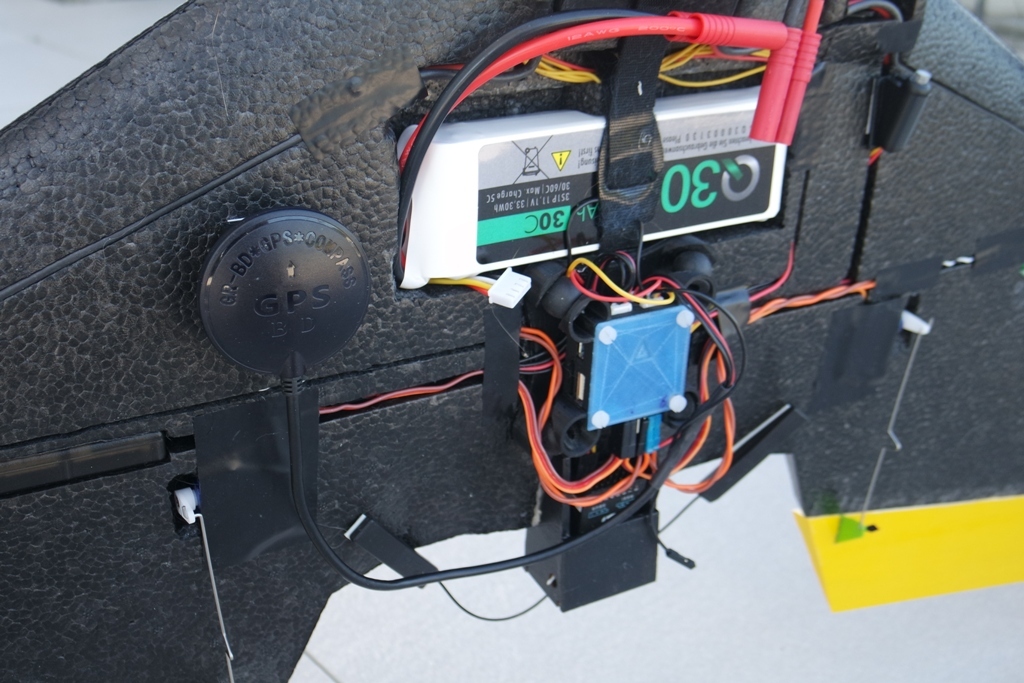
something must be coupling the movement of the servos closely to the movement of the IMU. One possibility is through cables, perhaps that GPS cable?
When the oscillation is happening try putting your hand on various parts such as cables and see whether restraining the part stops the oscillation.
Yes, you are right.
Its a perfect 16 Hz Oscillator.
The results:
Vertically QSTABILIZE
When I touch the FC less vibs, when I hold strongly the Wing which is oscilating at the back, no shakes.
GPS on top or not doesn’t change the frequency.
Same reaction with hard mounted FC.
When I hold the wing in the hand at the props vertically, a few shaks and normal, but hard, nervous and hypersensible, reaction of the Elevons.
The few shakes are after moving. The Q System seems to be at the limit of the oscilating system.
But when put carefully on the ground it starts to shake. The back, where at a Nuri the motor ist mounted, +/-10mm.
The whole wing is shaking because of the velcro fastener which hold the wingtips acting as landing gear.
Horizontally in FBWA
I can move, hit or shake the wing with absolutly no shaking elevons. Just smooth corrections according to the direction as expected.
Verry bad, the only one day with good wether since long time and bad wether anounced for the next few days:confused:.
The motors are off (not yet armed)
Elevons disconnected from the lever, no shaking.
Will make another video as requested.
The differences to the video with the crash are:
new Props (same size)
GPS from the back to the wing. (Interference with the RX)
Beeper from back to the front (camera mount)
FW change to the latest Master.
For the 2 first starts (mid April), no such behavior with the same setup.
I notice your throttle stick was quite high during the QHOVER tests. That is why it climbed so fast.
When in QHOVER or QLOITER the throttle stick maps to climb rate, not to throttle. So anything above 50% means to climb, and anything below 50% means to descend.
To do a takeoff in QHOVER, just start with zero throttle stick and slowly raise it to be just above 50%. Then when you get the desired height, move it back down to 50% to hold that height.
if your next test does not work ,what I would try is to mount the controller and it’s mount on plywood and hard strap it to the battery to test if that mass stops the oscillations, then if that worked, try a ply plate across that center section,? looks like a lot of flex in the whole craft. I am using the same f/w and swinging motors around as well, and don’t have that problem
live and learn, I was trying to enter hover mode by just switching modes,any way to set manual hover and auto hover the same
[quote=“tridge, post:401, topic:15302”]
So anything above 50% means to climb, and anything below 50% means to descend.
[/quote]so is( qm_thst_hover), a way to ajust the stick position ?so setting at 0.7 would move the stick to 50%?
The FC mounted on the Battery, the system shakes like bevor. Only if held away of the wing it stops shaking.
And if touched slightly the battery, immediatly it starts again.
2 possible reasons:
the Pixracer is defective
the Firmware don’t work at least not for Pixracer.
3 possible ways:
to throw away the rubish and enjoy the summer with my copters
to replace pixracer with pixhawk (to check if pixracer is defective)
to flash the PX4 Stack wich support also Tailsitters (to check if APM does not mach pixracer for tailsitter)
sorry to hear, you might be right ,want to try with less active board mount,? maybe to soft, or board direct to the battery?strange that it worked before, or maybe time to take a break ? are you thinking loose component or connection on the board?