here is one I took today, if you want more let me know, it’s off yellow, not very aerodynamic
1 Like
Here’s another view of the Stryker’s transition from FBWA to Qhover. The nose drops in the middle of the transition due to the Z controller killing both motors to stop the climb. Will soon be trying Leonard’s patch to give priority to attitude control: https://github.com/ArduPilot/ardupilot/pull/5971

1 Like
2024t3 .032 alum.1/4 " x1/8 BB, nylon drag washers 4x40 screws
thanks for the photos!
I’ve pointed Jack Pittar (the CanberraUAV lead builder) to this discussion. He’s working on the design of our OBC TVBS now.
great Hi, Jack ! OBC?
never mind, outback got it!
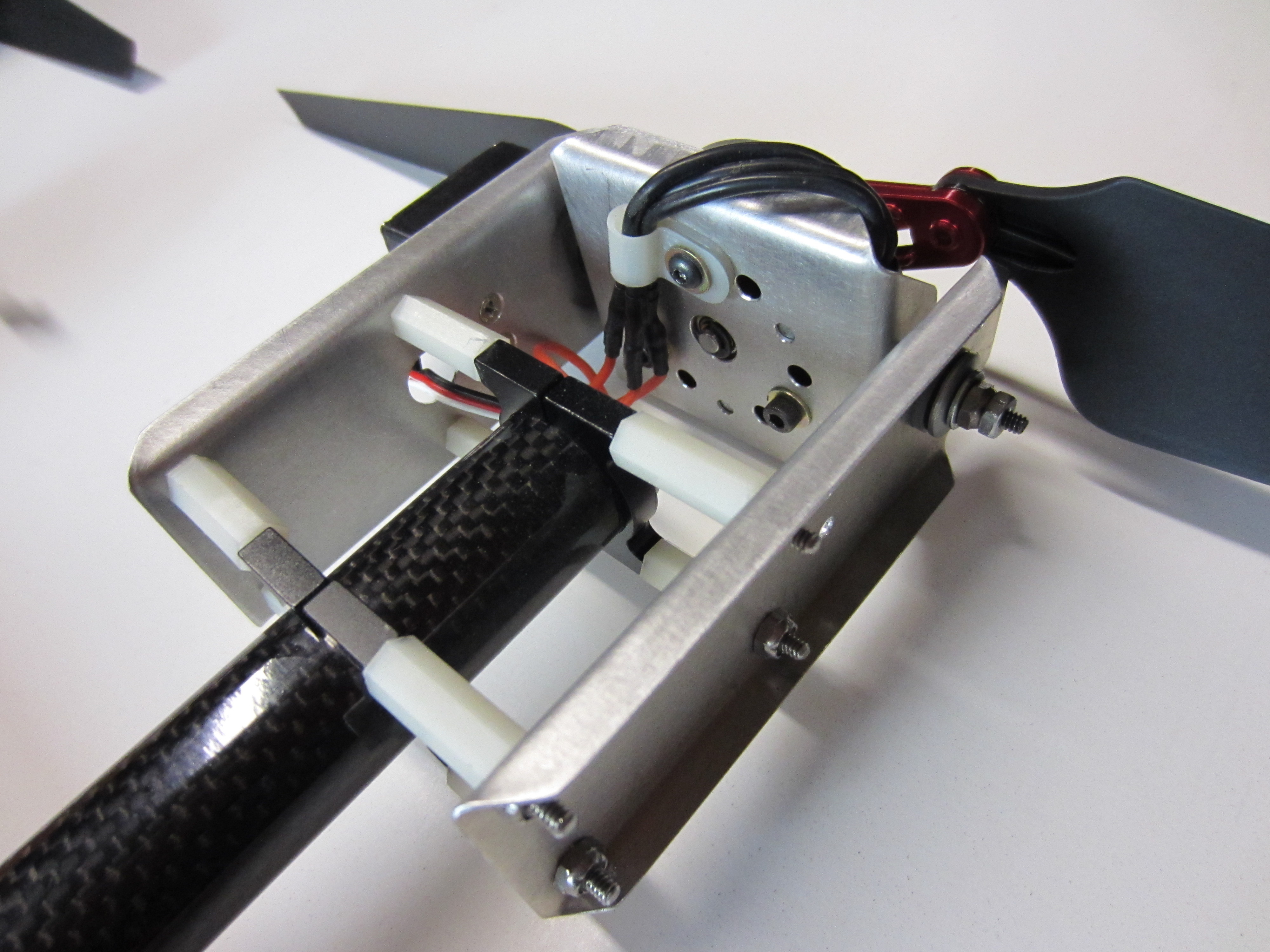
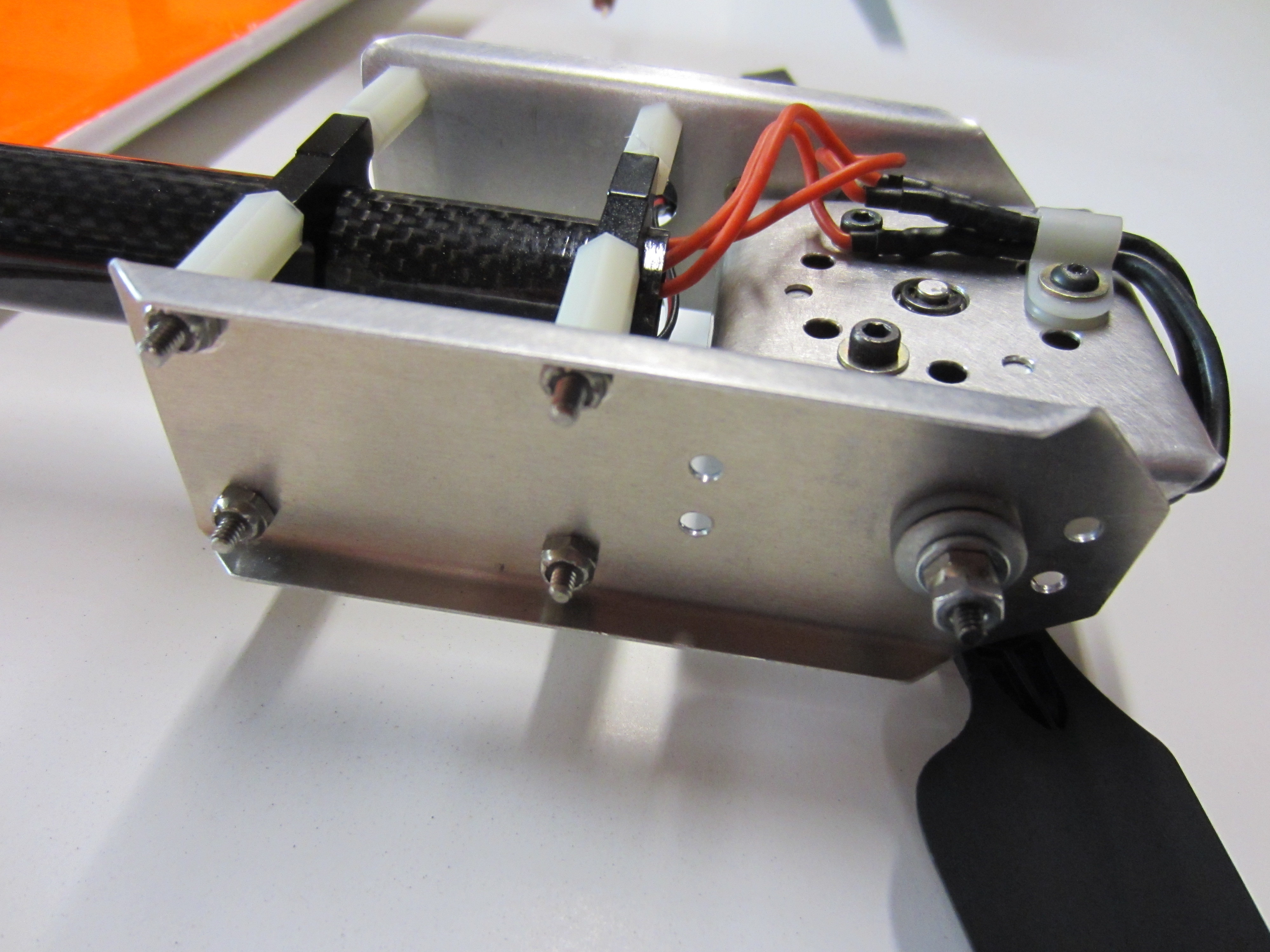
In the pics I see you are using folding props.
If you have havy vibrations, may be due to this type of Props.
On my Quad 650 I had to go back to standard props.(15x5.5)
And they need 10% less energy than the folding ones.
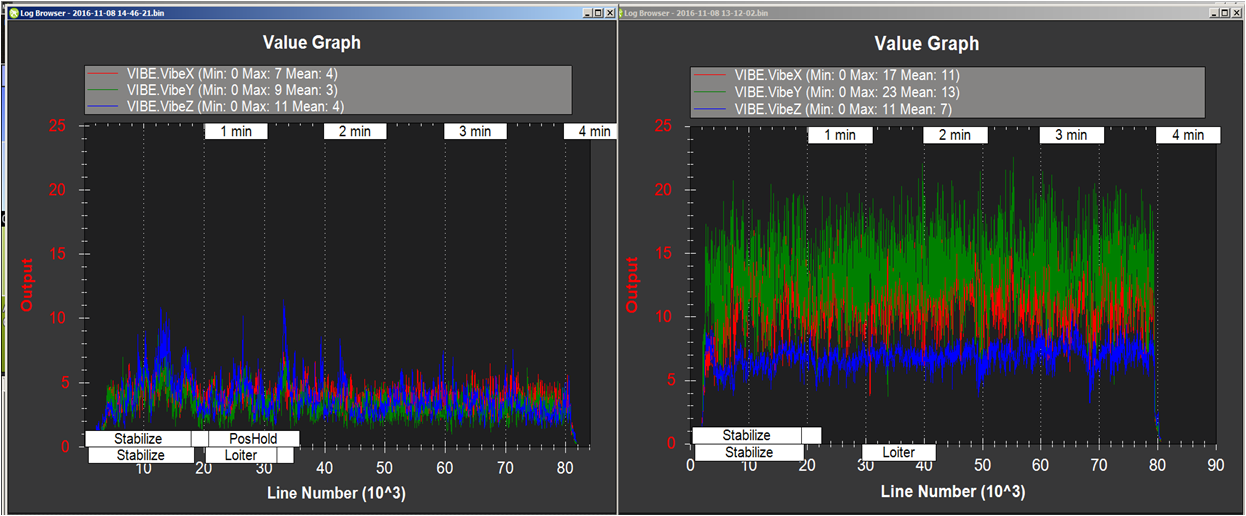
Left: Standard Props ------------------- Right: Folding Props
Hi, who’s props did you end up with ? looks like a big differance,but also i’m cheep and tried the 15" carbon from china, not so good.the mpc 14.47, mpc ‘s worked but not as good as the tarrot 15"
’
So you don’t have havy Vibs?
I used this one http://www.hobbyking.com/hobbyking/store/__55444__Multirotor_Carbon_Fiber_for_DJI_S800_Evo_Propeller_15x5_2_Black_CW_CCW_2pcs_.html
with this “nice” holder: http://www.hobbyking.com/hobbyking/store/__58050__Folding_Propeller_Adapter_for_Direct_Mount_Motors_Red_.html
And even balancing with this: https://www.rcgroups.com/forums/showthread.php?t=2337523
was not possible because moving blades made troubles.
Astonishing is that the Y-Axis is dramatically high.
The target was, to simplify the transport.
Where did you buy it?
direct from tarrot, also got the tube mounts in the pic.[quote=“lorbass, post:377, topic:15302”]
And even balancing with this:
[/quote]wow,…that one just melted my brain,
ask Tridge ,he’s working the logs,but they seem ok to me, I have never had good luck with carbon props ,these are plastic. but if you get into oscillations in pitch, they break at the root weak point
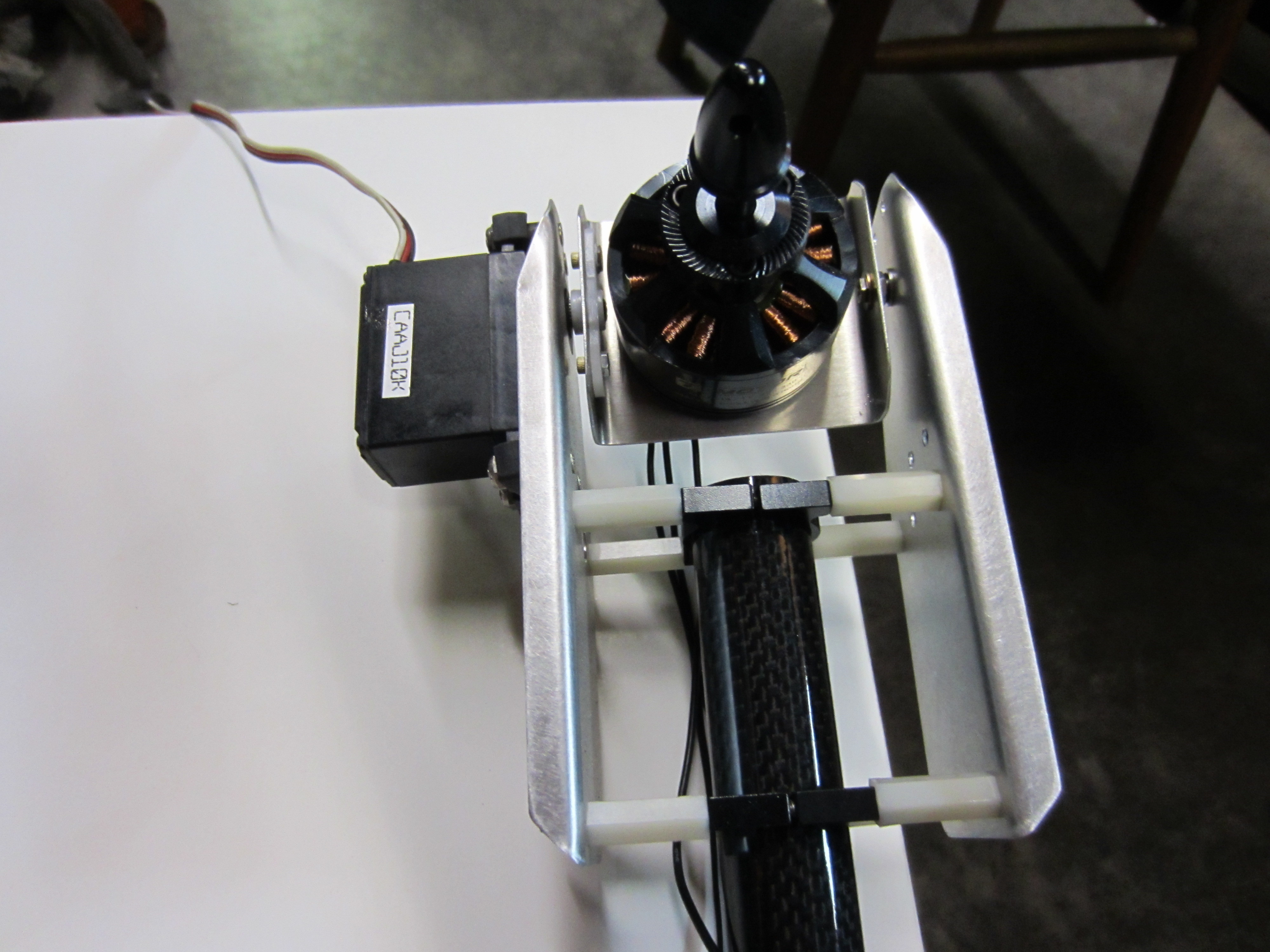
Jack… some pic of my simple build system 3/16" foam board 1/4" sticks and lite ply hard points
top is about 1 1/2" shorter with 1/16" cap strips top & bottom, c/f tube spar, very quick build



done, logs on the way, google drive and youtube video
this is on my last post
Thanks Yonika.
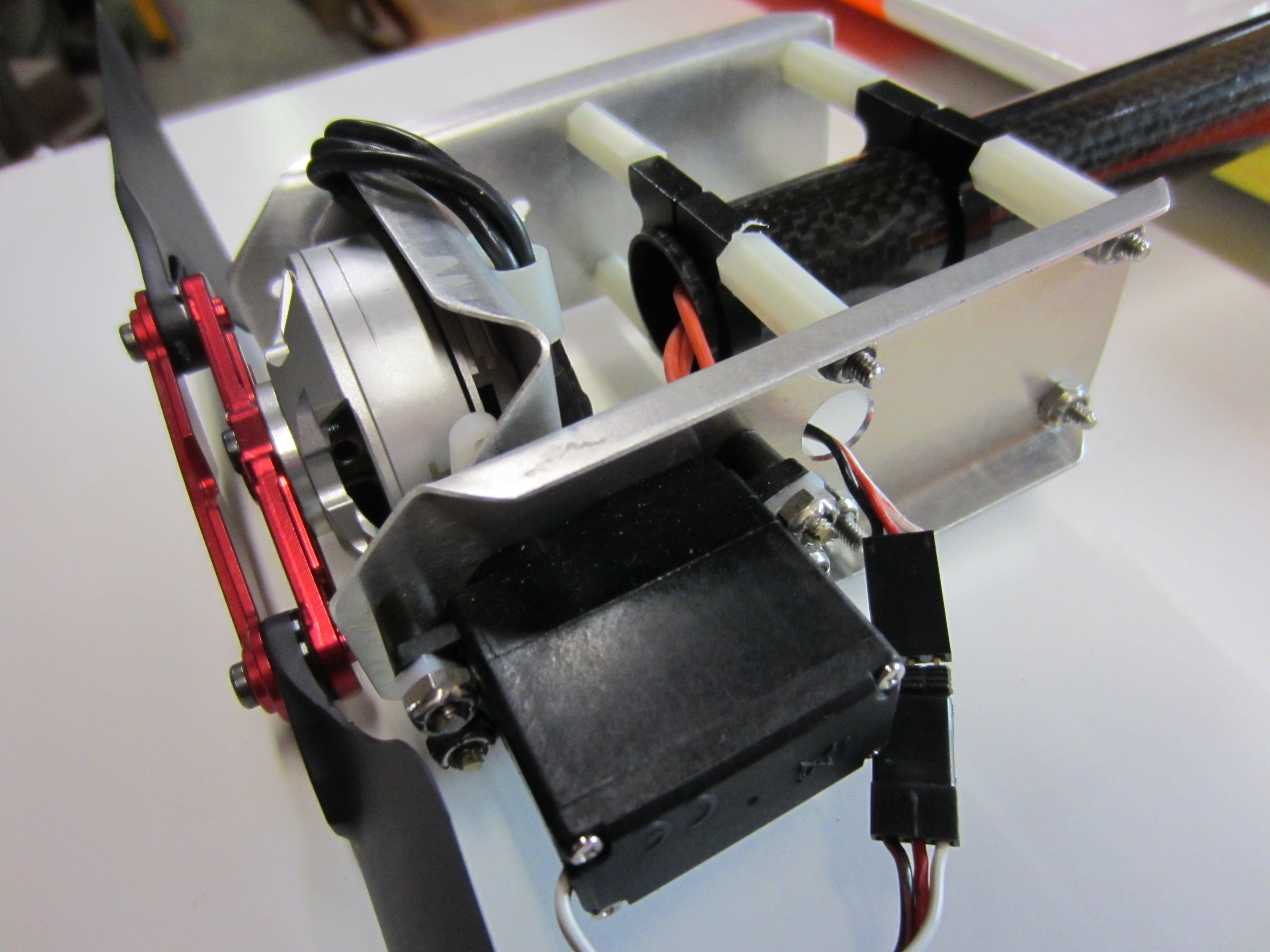
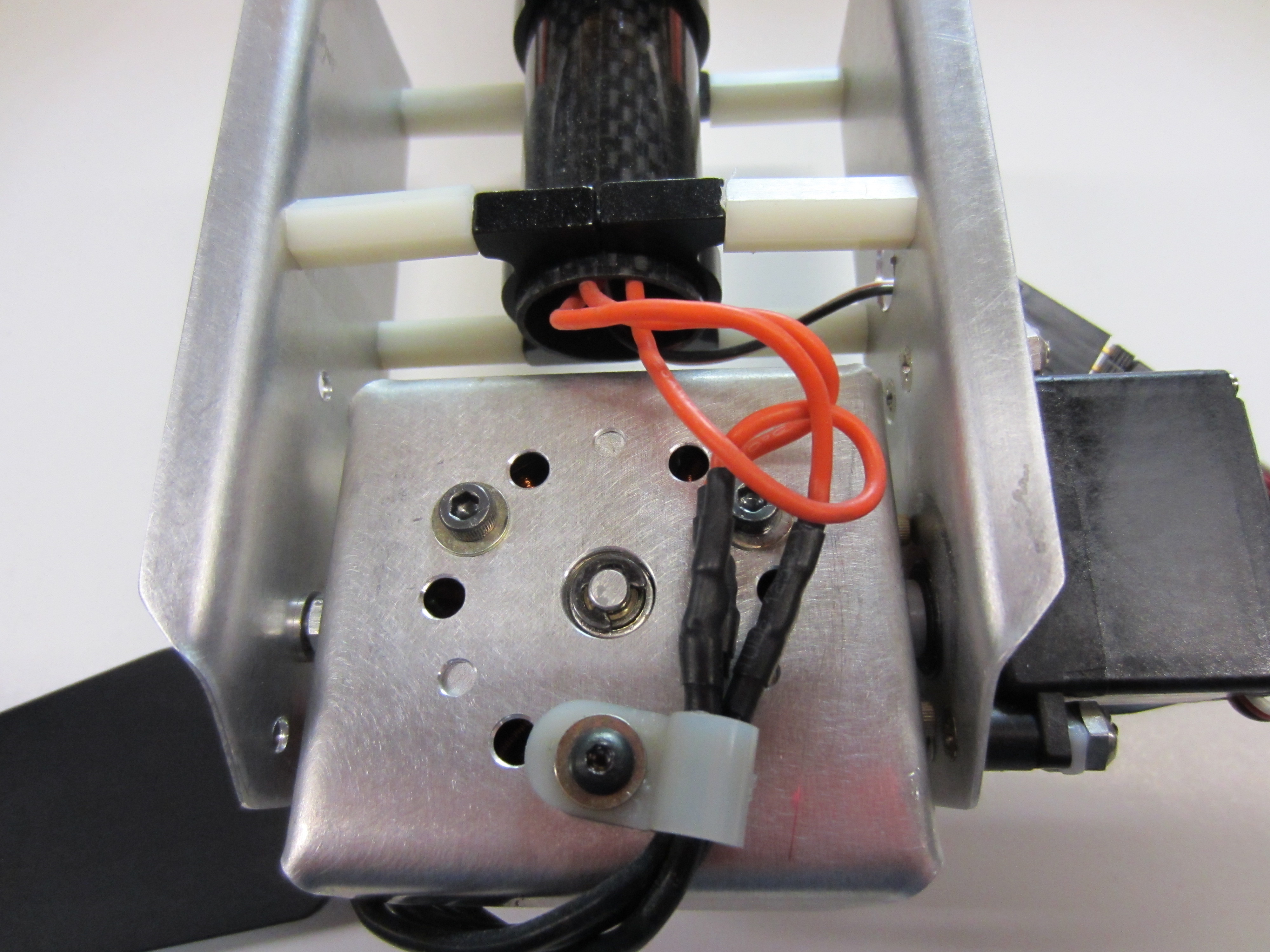
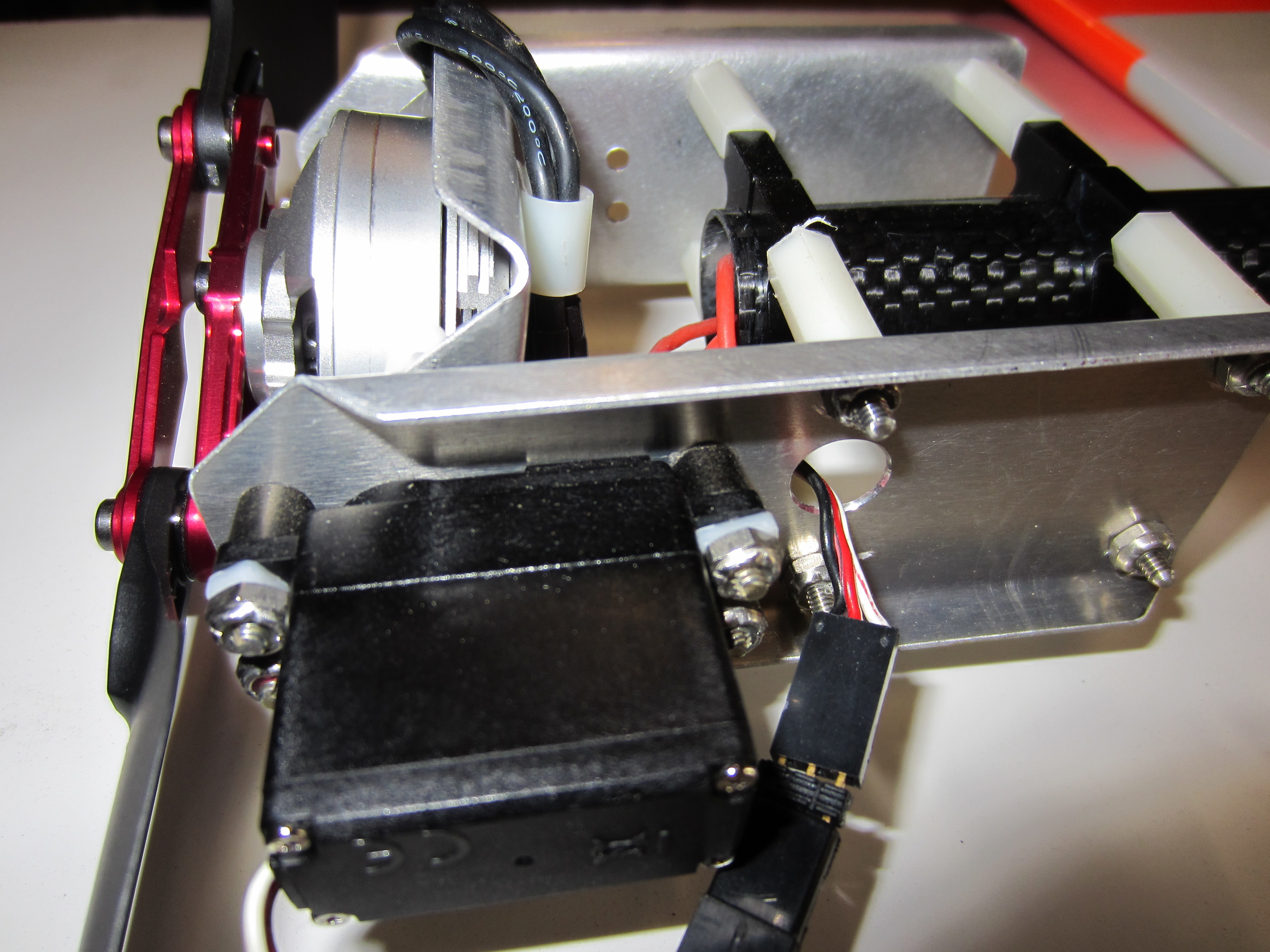
Your method of making the motor mount with tilt servo is interesting.
Rather than just repeat your pioneering project, I think my efforts would best be served by going to the next step.
I am presently evaluating the offer of what, for our purposes, might be the ideal fast glider wing. The challenge will be in adding to an existing build.
It will be optimised for efficient and fast forward flight, so the design will have to facilitate extensive streamlining in the following build. The wing has a higher aspect ratio, and is not a symmetrical section, so I will have to add a short tail with just an elevator for longitudinal stability.
Jack.
keep me in the loop on your build, sounds great.
@tridge
Next trial with new props
heavy shaking of the elevons when safty switch ist pressed.Ch1, Ch2 oscillate 1000-2000.
Also after new accel calib.
When moving around by hand, shaking varies, some positions even calm but not on the ground.
Even when armed. Didn’t dare to start with this effect.
Log: https://drive.google.com/file/d/0Bxldq38bfbqHYnBOM2FoRnNzbXM/view?usp=sharing
V3.00beta5(4679d3)
Can you help?
@lorbass Looks like your Q_A_RAT_PIT_D is much too high. I’m also curious how you have the autopilot mounted. Is it possible it has such a soft mount that its oscillating on its mount at 13Hz?
Thanks for the quick answer.
Is Q_A_RAT_PIT 0.01 to high? Your advice after my second start with crash.[quote=“tridge, post:278, topic:15302”]
I also think you need more D term on pitch, I’d start by increasing it from 0.0036 to 0.01 and it may need more
[/quote]

Pixracer whithin printed housing, on damping balles.
I mounted the GPS on top with the idea to have a damping Mass.
(Your advice with an aluminium plate)
This is beside the D-Param the second difference to the last tryel with no shaking
supplement: Same behavior with ROLL and PICH D set to 0.0036
and GPS disassembled from PC Housing
When the wing is positionned horizontal, and Mode FBWA, then no shaking after safty switch on.