Thanks for your sympathy, I’m not used to loose.
Development is to find a way around if it the plan does not work.
I’m already on the way to PX4. But this system needs an airspeed sensor
which I have to connect.
Will report the result tomorow. or
or 
well that will tell you a lot, looking forward to your report
Hi, in manual motors spin up normal, in stablize right motor the one that drops out, starts much later than flys right wing low, in hover mode, it might not start at all ,and the left will flip the craft, this is gray with pixhawk have got it to hover but just waiting for the r wing to drop and crash again, changed controllers x2 motorsx2 rewired all power wiring still n/g ??? any idea ?send logs?
yes please. Try to identify which log corresponds to the video you just posted.
Next “shaking” report.
Also with the PX4 Stack the Wing shakes as bevor.
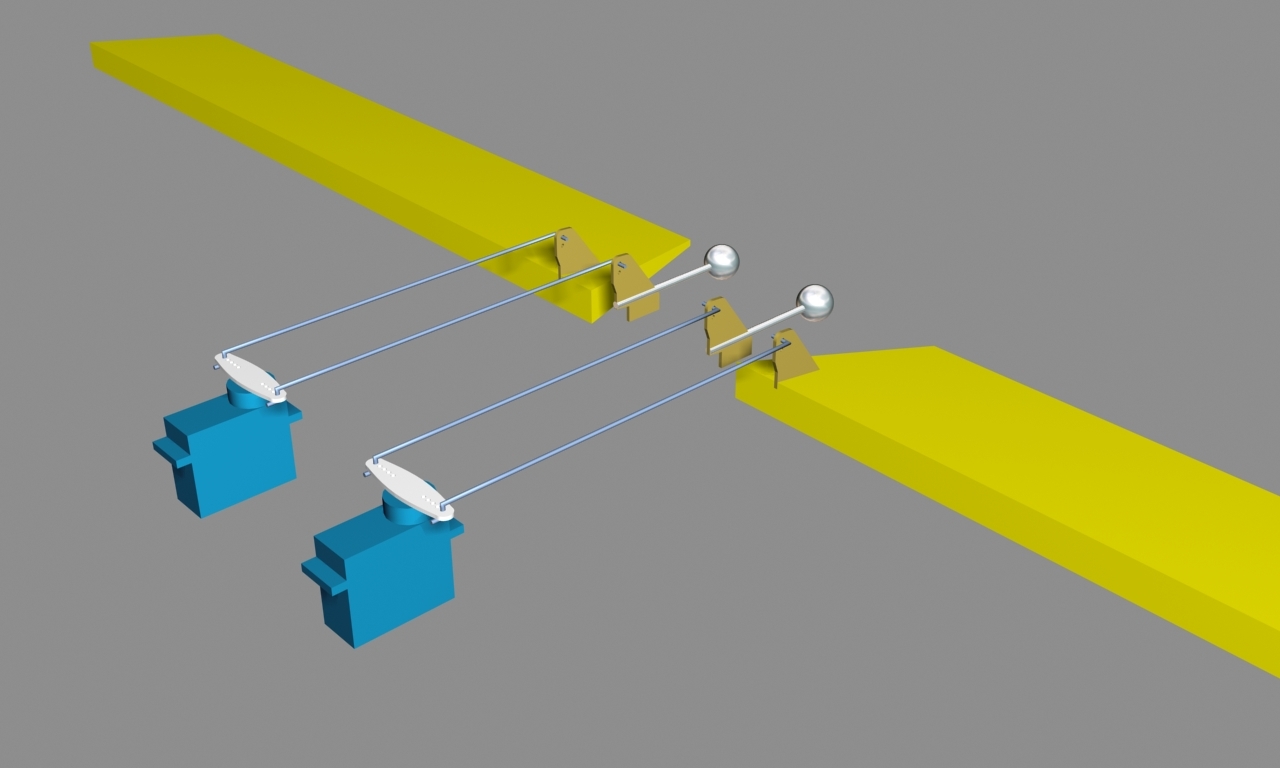
Has to do with the mass inertia of the Elevons compared with the whole wing.
When I fix the linkage closer to the center of the servo (less angle of elevons) the
shaking effect is fewer.
One of the elevon linkage disconnected, no shaking.
I made the elevons larger than original in order to reach better control in copter mode as somewhere
recommended and succesful realized here:

OK may be the mass of the fuselage is greater.
3 possible ways now.
- To change the FC to Pixhawk
- To test the smaller elevons (with less effect)
- To install a counterbalance as used in the olden days for steam engins (weight moving up when elevon move down) May be, thats an argument for vectored tailsitter?
Project steam engin: Balanced Elevons (instead of Computer compensated)
Is there someone using a Pixracer for a Tailsitter?
I have pixracer in illusion belly sitter ,[quote=“lorbass, post:412, topic:15302”]
When I fix the linkage closer to the center of the servo (less angle of elevons) the
shaking effect is fewer.
[/quote]
can the controller sensitvity be dialed way down? then ajusted up to a point before the oscillations? I have done that with my custom controllers, again, no loose componants or connections ?
I don’t know how, I reduce Q_A_RAT_PIT_P to 0.1 with no effect.
Yes, I would say it should be solved by correct parameter setup.
This can happen with other Frameset to.
Will check it more thoroghly.
dial down sounds like a Tridge question
I noticed that FW ACRO mode should be able to hold any attitude, including a nose-up hover. Has anyone tried that with a tailsitter?
As @tilt mentioned, he is using a pixracer, but I believe he has added some mass in the form of an aluminium plate below the pixracer. Adding mass to a flight controller is a common method of improving isolation, and it is often especially useful with very light controllers like the pixracer.
yes, you could reduce the gains. Rough rule of thumb is find the smallest gain that causes oscillation in flight, then halve it to give some margin.
I would suggest you add some mass to the flight controller though. A aluminium plate or some lead is good.
i think you’ll find it won’t work well, although I haven’t tried. The ACRO mode in FW is very simple - it needs a lot of work. The main thing we need to do is make it use the copter rate controllers, which are much more suitable for low speed acro than the fixed wing controllers.
any luck on your end, or should I keep diggin
sorry RIck, I’ve been busy on another project. I’ll try and have a look later today
no problem, weather going bad for the weekend, noreaster
Solved the issue with shaking elevons by reducing the radial distance at the servo lever.
Now, the angle of the elevons is +/- 25 degrees.
This angle was not enoughe to hold the position and the Wing drifted with full up elevon backwards.
I tried to yaw the Tailsitter by 180 degrees in order to get it back. To hold this critical pitch and to get it down
was to much for the instable System. And it made a flip and crashed.
Heavy destroyed, also my motivation.
By
this is what Dave’s been up to… very jmpressive
@tilt Great video; I wonder what trades are involved with placing the rotors at the wingtips vs inboard.
@lorbass Sorry to hear about the crash. I’m having better luck with my Stryker than I ever did with the Caipiroshka configuration:
It’s much less susceptible to crash damage since the props are protected by the wings and fins.
1 Like
very nice! Great to see thrust vectored tail sitters being used by NASA
wing tip vortice control, more efficiency I hear 10% more efficiency of the wing in ff